







1.背景分析与挖掘目标
1.1背景概要
目前,模式识别中的运动视觉分析处在高速发展阶段,诸如国家863计划的无标记仿人乒乓球机器人[1]等项目,均表现出该领域的发展前景。其核心是利用计算机视觉技术从图像序列中检测、跟踪、识别人或物,并对其行为进行理解与描述。
此外,对于飞行物体的轨迹追踪与预测对体育、军事、工业等领域均具有重要的研究意义和应用价值,其中涉及的目标感知、运动跟踪和建模、运动规划和执行也是各类体育项目未来优化的关键技术。如文献[2]讨论了目标表观建模方面的一些研究进展,文献[3]对多种跟踪算法进行了实验对比与分析;部分文献在总结时,对目标检测与跟踪部分只进行了简要概述,如文献[4]分别综述了行为理解和智能监控的研究进展,在其底层部分简要地介绍了目标的检测与跟踪,没有给出针对该领域较全面的整理。然而,随着时代的发展,目标检测与跟踪技术也在突飞猛进,近几年来该领域的研究成果可谓日新月异,各种优秀算法也是层出不穷。[5]但专门针对篮球的运动目标的检测和跟踪,目前尚未有文章有所描述,希望在这方面进行一些分析。
1.2数据挖掘目标
篮球作为得分判断相对简易的运动项目,不同于乒乓球单一的落点和轨迹追踪,往往针对高速球类的判断[6],也不同于足球这样大范围的球门射点判断,针对于选手在不同环境下的决策选择。因篮球和篮筐大小相近,没有很好的运动轨迹不容易造成进球,因此其更注重最终是否能够进球,也往往是观众最激动、选手最关心、教练组最关注的目标点,以此为目标进行进球轨迹的建模以及预测就是本题的分析目标。
本文希望通过不同类型的篮球出球方式,判断不同轨迹下未来数十帧的运动趋势,并以此来判断是否最终可以得到进球。期待这样的模型建立可以适配到不同的球员信息,可以以此为模板进行篮球投射轨迹的优化,提升进球率。
2.素材收集与整理
我们进行多种投篮素材组合检验的形式,让模型可以匹配更多的投进/没投进情况,方便我们后续进行分析处理,总共收集5个MP4视频素材,分别考虑一下情况:
1.不触板框(不接触篮筐和篮板)
2.触框弹出(篮筐前弹出)
3.触框弹出(篮筐后弹出)
4.空心投进(不影响运动轨迹)
5.触框投进(影响运动轨迹)
为方便模型建立,我们不考虑接触篮板的任何情况,因为会涉及触板角度、材料刚性、反馈强度等因素的影响,最终使结果影响条件过多不方便建模。
在读入视频素材成功时,可以得到浏览的图像。由于图像太大,且速度过快,我们使用cv2.resize调整整体大小为0.7*0.7,并cv2.waitKey()设置刷新图像延迟为100ms。
3.目标检测与追踪
3.1篮球目标检测
经过运动过程的简化,我们仅考虑本文获取的视频素材环境,因此在运动过程中我们可以肯定,整体环境及其参与的物体元素没有发生改变,仅有篮球为主动移动物体。
在可查询到的文献中有帧间差分法、光流法、背景差分法等三种主流的方法来进行物体的提取。
第一种帧间差分法,是通过对视频图像序列中相邻的两个或三个图像进行差分运算,来获得运动物体轮廓。因此帧差法算法简单、计算量小,适用于动态变化环境,但其检测精度不高,分割运动对象的完整性差。
第二种光流法,是给图像中的每一个像素赋予一个速度矢量,这就形成了一个图像运动场,在运动的一个特定时刻,图像上的点与三维物体上的点一一对应,这种对应关系可由投影关系得到,根据各个像素的速度矢量特征,可以对图像进行动态分析。[7]
因此,由于光流法计算复杂,采用的是迭代法求解光流的计算时间比较长,一个是很难满足实际应用中的实时处理的要求,且算力也较大简单环境没必要进行此类方法,虽具有不需要知道图像先验知识的优点,但其计算量过大,不适于实时检测,本文也没有采用这种算法。
第三种是背景差分法,需要有一张背景图像,然后对视频图像和此背景图像进行差分运算,用一张新的图像保存差分结果的绝对值。[8]
而后对差分图像进行判断,若像素的值大于一个特定的闭值,则认为视频图像中在相同位置的象素属于运动目标区域;若象素的值小于或者等于一个特定的闭值,则认为视频图像中在相同位置的象素属于背景区域。
但因背景差分法作用于像素,在这个低层次的处理中,操作的对象是单个的象素,由于缺乏对整体图像的完整“理解”,检测结果很客易受噪声和各种突变的影响,使检测结果的准确度大大下降。[9]
本文由于场景稳定,数据量较少且需算法较为准确,最终选择适合利用简单的颜色判别法进行球的定位判断,且辅以高斯滤波提升球泛化度,降低球表面其他颜色与光反射的干扰,并使画面整体噪点降低,提升识别准确率。
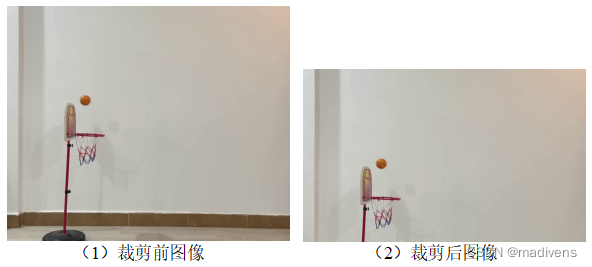
视频转瞬即逝,且在移动过程中难以捕捉,我们就截取其中一帧含有球的图像,后进行颜色的捕获,以单帧的图像识别来作为模板方便后续的物体追踪,即为上述已经完成裁剪的Ball.png文件。
且在我们裁剪的过程中不难看出球的颜色和背景、贴地瓷砖、篮板颜色均较为相近,由于地面的运动不会对整体运动轨迹产生干扰,我们可以直接通过裁剪去掉下半部分的图像,防止颜色捕获的影响。因此可以裁剪图像矩阵的[0:900, :]即整个图像除去地瓷砖的上半部分。
查询球的颜色需要用到cvzone的ColorFinder,相比于opencv原本的包效果更佳。开始调试时,我们选择ColorFinder(True)以此可以帮助我们调整颜色获取区间,发现球的颜色,在后续发现球的颜色后,我们可以调整为ColorFinder(False)。
设置一个hsvvals属性的随机值,而后我们可以进行调整来得到合适的阈值,初始调节效果、最终捕获效果和掩模[10]的对比如下:
(1)默认HSV属性效果
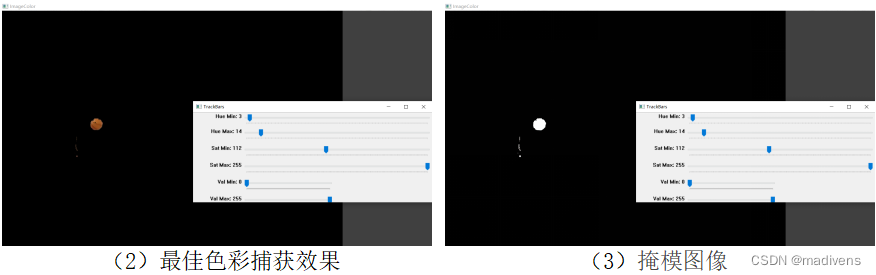
因此,最终我们找到了合适的属性值,来捕获球的颜色,且图像中可以排除背景、篮板等近似的颜色,如下表所示:
| HSV属性 | 属性值 |
| Hue Min | 3 |
| Hue Max | 14 |
| Sat Min | 112 |
| Sat Max | 255 |
| Val Min | 0 |
| Val Max | 255 |
3.2篮球目标追踪
我们利用findContours可以得到球的定位方法,并利用minArea设置像素值为200来缩小检测范围,降低噪声的干扰,可以通过追踪球的颜色,得到对球的定位追踪。[11]
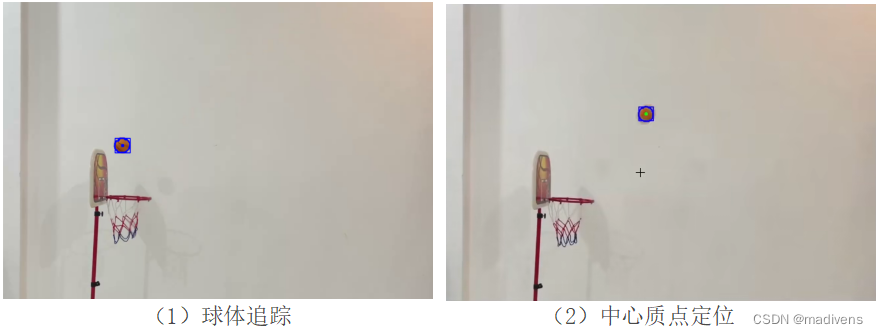
我们期望得到运动过程的实际曲线和预测的未来轨迹,因此我们假设球为一个质点,也就是可以泛化成其中心点,将其设置为绿色,并在运动过程中类似打点计时器的效果,来明显地展示绿点的动态,用线条来表现球质点的运动点移动。

在显示过程中往往我们只能显示一帧上的动效,而实际我们却需要整个运动状态下的所有点轨迹,因此我们可以设置其为一个列表进行迭代,以方便我们后续查阅显示其值。并运用for循环语句对所有动态点,及其之前点连线,进行绘制展示,并对初始第一个零位置进行特殊处理配置。
4.轨迹判断与进球预测
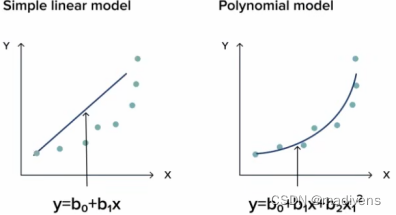
我们希望通过多项式回归的方法来进行轨迹判断,并运用阈值判断。
我们可以得到形如下式的多项式方程,![]()
或者我们运用较为常见的形态,![]()
在拟合效果上,因抛物线的基本形态呈现的有初速落体运动,动效模拟优于普通的线性方程形式,![]() 因此更方便我们最终拟合成合适的曲线。
因此更方便我们最终拟合成合适的曲线。
并且也需要我们可以预测,未来十帧甚至二十帧以上的曲线图。
我们可以引入numpy包的polyfit函数来拟合二阶多项式的系数,利用for循环内的球定位坐标列表,最终可以得到二阶、一阶和常数项的系数,即对应的A、B、C。
而后遍历所有的x值,可以结合相应的系数得到其y值,确定二者就确定下该位置的坐标,因此可以预测出未来的曲线形式。
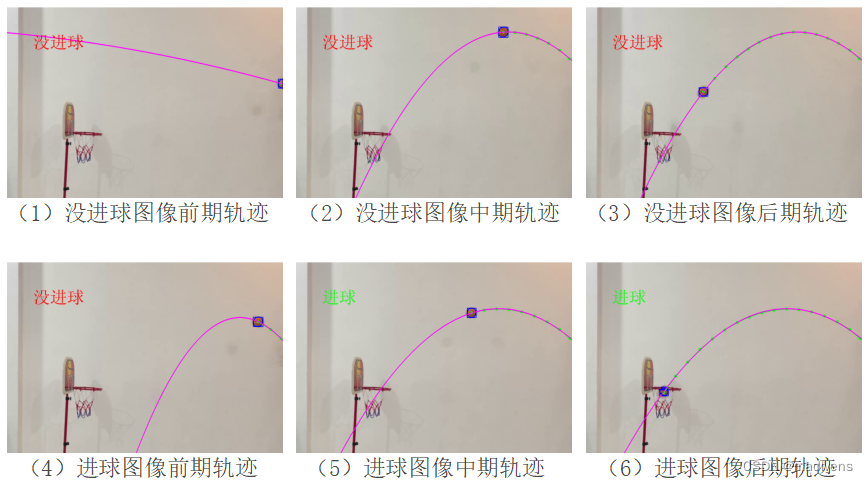
下面列举没进球与进球两类视频的轨迹判断,对比其前中后期的轨迹预测,可以发现在前期往往轨迹不好判断为稳态,在中期最高点左右的区域更有利于未来的轨迹预测,判断进球也更为精准。
可以进行轨迹判断后,我们需要在球达到篮筐方向前,预测出球是否会最终进入框内,可以转换判断为是否会经过下图所示橙色区域内。

最终我们在y值为590时,如果x值在[330, 430]范围内,则判定为进球,我们可以运用一元二次方程求根公式 ,得到最终的x值与阈值进行比对,本文运用numpy包的roots函数进行实现。
,得到最终的x值与阈值进行比对,本文运用numpy包的roots函数进行实现。
5.结果分析与总结
最终我们可以在物体运动到轨迹最高点位置,或者接近最高点时,物体整体轨迹固定,所有的五个视频均可以准确预测篮球是否进球。
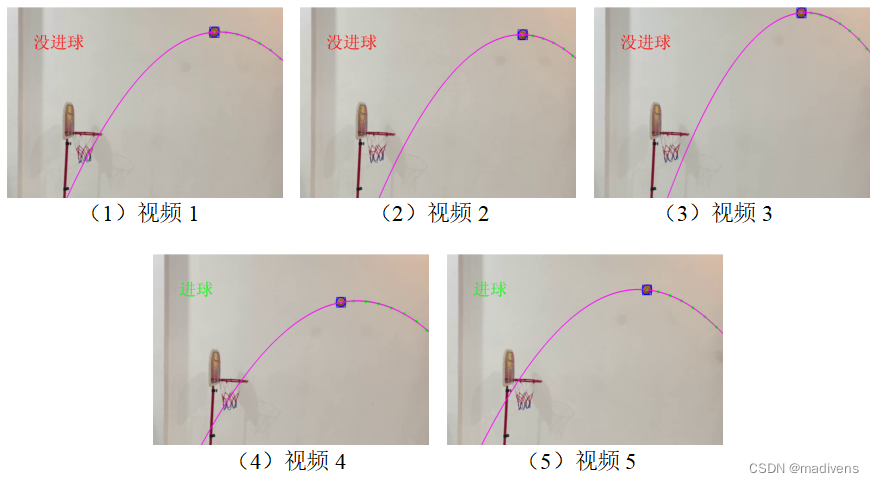
图 8 进球预测
目前得到的多重轨迹测试,模型的拟合效果均达到预期。在图像预处理阶段本文利用研究高斯模糊对常见噪声进行消除,在目标检测阶段考虑目标检测的轻量化和有效性,采用改进的颜色判别法对运动目标检测进行仿真实验。
并对颜色干扰项进行图像切割,并捕获HSV色彩空间的篮球颜色属性,得到最终的目标检测结果,得到有效抑制干扰的球体跟踪模型。
而后缩小检测范围提高检测精度,并以质点思想带入,描绘篮球已知轨迹,方便后续分析预测。以多项式回归的公式拟合,计算过往轨迹的坐标数列取得合适的系数描绘未来数帧的轨迹,最终以拟合结果判断是否落入目标网中,取得是否进球的依据,有良好的可行性和简洁性。
论文通过实验验证了改进后的运动目标检测与跟踪算法,准确度达到100%,具有良好有效性,对球类追踪和进球预判等体育领域具有广泛的应用价值。
参考文献
[1]章逸丰. 快速飞行物体的状态估计和轨迹预测[D].浙江大学,2015.
[3] Smeulders A W M, Chu D M, Cucchiara R, Calderara S, Dehghan A, Shah M.Visual tracking:an experimental survey.IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36 (7) :1442-1468
[4]黄凯奇,陈晓棠,康运锋,谭铁牛.智能视频监控技术综述[J].计算机学报,2015,38(06):1093-1118.
[5]尹宏鹏,陈波,柴毅,刘兆栋.基于视觉的目标检测与跟踪综述[J].自动化学报,2016,42(10):1466-1489.DOI:10.16383/j.aas.2016.c150823.
[6]张远辉. 基于实时视觉的乒乓球机器人标定和轨迹跟踪技术研究[D].浙江大学,2009.
[7]郭春生,王盼.一种基于码本模型的运动目标检测算法[J].中国图象图形学报,2010,15(07):1079-1083.
[8]惠婉玉,吴玉秀.图像去噪滤波方法的对比研究[J].洛阳理工学院学报(自然科学版),2021,31(01):71-76.
[9]吴晓阳. 基于OpenCV的运动目标检测与跟踪[D].浙江大学,2008.
[10]张国权,李战明,李向伟,魏伟一.HSV空间中彩色图像分割研究[J].计算机工程与应用,2010,46(26):179-181.
[11] 王科俊,郭庆昌,庄大燕.基于差分法与改进活动轮廓模型的追踪算法[J].计算机工程,2008(02):212-214+231.

















 2139
2139

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









