







 本文详细记录了在Ubuntu环境下自定义编译KriaRoboticsStack (KRS)遇到的Linux内核加载失败问题,通过排查发现是权限问题导致镜像生成不完整。最终通过以管理员权限编译解决了问题,成功在kv260上运行ROS2实例和JupyterLab环境。
本文详细记录了在Ubuntu环境下自定义编译KriaRoboticsStack (KRS)遇到的Linux内核加载失败问题,通过排查发现是权限问题导致镜像生成不完整。最终通过以管理员权限编译解决了问题,成功在kv260上运行ROS2实例和JupyterLab环境。
0、引言
在前期成功自定义编译Kria Robotics Stack(KRS)后,一直没有在kv260上跑起来,硬件自boot之后就一直停掉,现象如下:
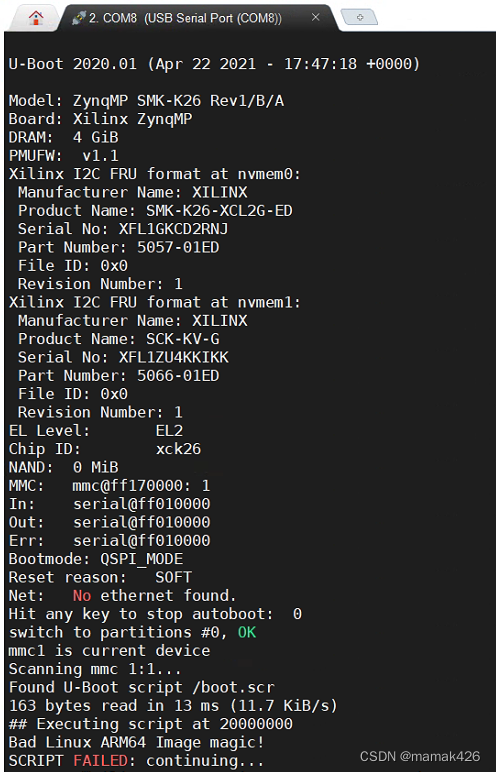
很明显,是加载linux内核失败!!!
经历过五六次失败以后,各种方式都试了,换机器编译,多次重编译之后,偶然间在一次重编译之中,最后一步的生成SD_Image过程中发现需要管理员用户权限,后来推测是不是权限的原因导致生成的镜像不完整,或者根本就没完成,那肯定就运行不起来了。
具体这个过程就不一一列举了,相信玩这个的伙伴们也可能会碰到类似问题,如果你看到这个没出问题,那么恭喜你,这篇闭坑文章就可以跳过了。如果你也碰到了,那就继续往下看看吧。
这里把成功编译版本,截图复述一下,可能不全面,只覆盖了部分过程。
1、前提
1、Ubuntu20.04.4安装 Kria Robotics Stack(KRS)_mamak426的博客-CSDN博客
2、补充:解决Ubuntu20.04.4安装KRS时无法下载github代码问题_mamak426的博客-CSDN博客
请按照上述两篇文章及官方文档接着继续编译。
接前期编译操作步骤如下:
$ cd 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1253
1253

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









