







欧式聚类
std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> PclTool::euclideanClustering(const pcl::PointCloud<pcl::PointXYZ>::Ptr& cloud)
{
std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> clustered_clouds;
// 下采样
pcl::VoxelGrid<pcl::PointXYZ> vg;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
vg.setInputCloud(cloud);
vg.setLeafSize(0.01f, 0.01f, 0.01f);
vg.filter(*cloud_filtered);
// 创建平面模型分割的对象并设置参数
pcl::SACSegmentation<pcl::PointXYZ> seg;
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane(new pcl::PointCloud<pcl::PointXYZ>());
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_PLANE); // 分割模型
seg.setMethodType(pcl::SAC_RANSAC); // 随机参数估计方法
seg.setMaxIterations(100); // 最大的迭代的次数
seg.setDistanceThreshold(0.02); // 设置阀值
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_f(new pcl::PointCloud<pcl::PointXYZ>);
int i = 0, nr_points = (int)cloud_filtered->points.size();
while (cloud_filtered->points.size() > 0.3 * nr_points) // 滤波停止条件
{
// Segment the largest planar component from the remaining cloud
seg.setInputCloud(cloud_filtered); // 输入
seg.segment(*inliers, *coefficients);
if (inliers->indices.size() == 0)
{
std::cout << "Could not estimate a planar model for the given dataset." << std::endl;
break;
}
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud(cloud_filtered);
extract.setIndices(inliers);
extract.setNegative(false);
// Get the points associated with the planar surface
extract.filter(*cloud_plane); // [平面
std::cout << "PointCloud representing the planar component: " << cloud_plane->points.size() << " data points." << std::endl;
// // 移去平面局内点,提取剩余点云
extract.setNegative(true);
extract.filter(*cloud_f);
*cloud_filtered = *cloud_f;
}
// 创建KdTree对象用于欧式聚类的搜索
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud_filtered);
std::vector<pcl::PointIndices> cluster_indices;
pcl::EuclideanClusterExtraction<pcl::PointXYZ> ec; // 欧式聚类对象
ec.setClusterTolerance(0.02); // 设置聚类容差为2cm
ec.setMinClusterSize(100); // 设置一个聚类的最小点数为100
ec.setMaxClusterSize(25000); // 设置一个聚类的最大点数为25000
ec.setSearchMethod(tree); // 设置搜索方法
ec.setInputCloud(cloud_filtered);
ec.extract(cluster_indices); // 从点云中提取聚类
// 迭代聚类索引并创建每个聚类的点云
for (std::vector<pcl::PointIndices>::const_iterator it = cluster_indices.begin(); it != cluster_indices.end(); ++it)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_cluster(new pcl::PointCloud<pcl::PointXYZ>);
for (std::vector<int>::const_iterator pit = it->indices.begin(); pit != it->indices.end(); ++pit)
cloud_cluster->points.push_back(cloud_filtered->points[*pit]);
cloud_cluster->width = cloud_cluster->points.size();
cloud_cluster->height = 1;
cloud_cluster->is_dense = true;
clustered_clouds.push_back(cloud_cluster);
}
return clustered_clouds;
}
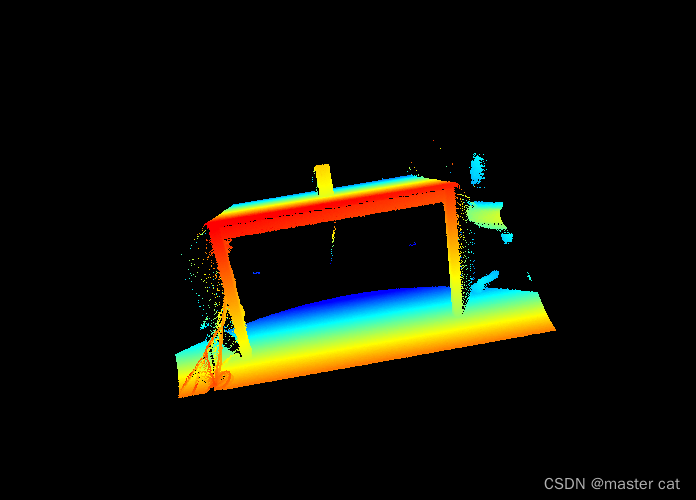
原始点云
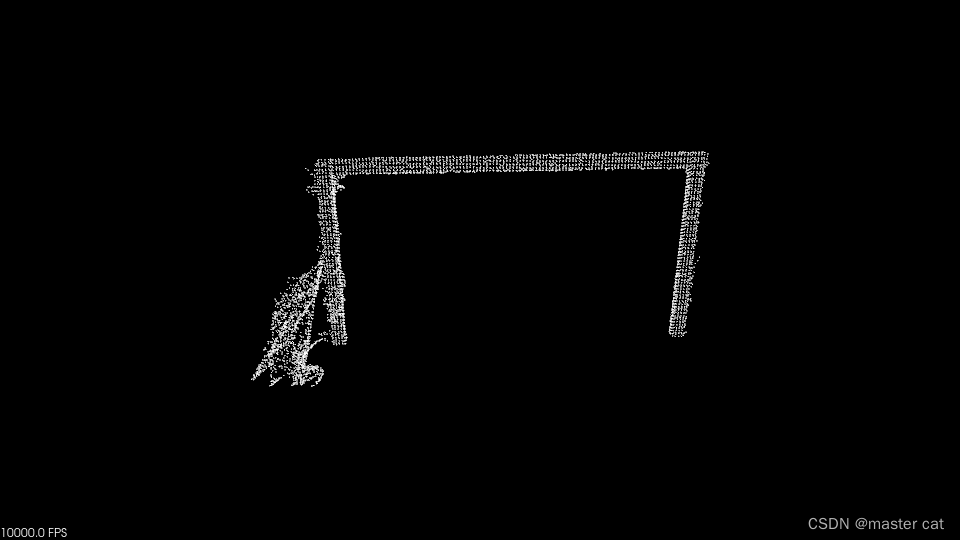
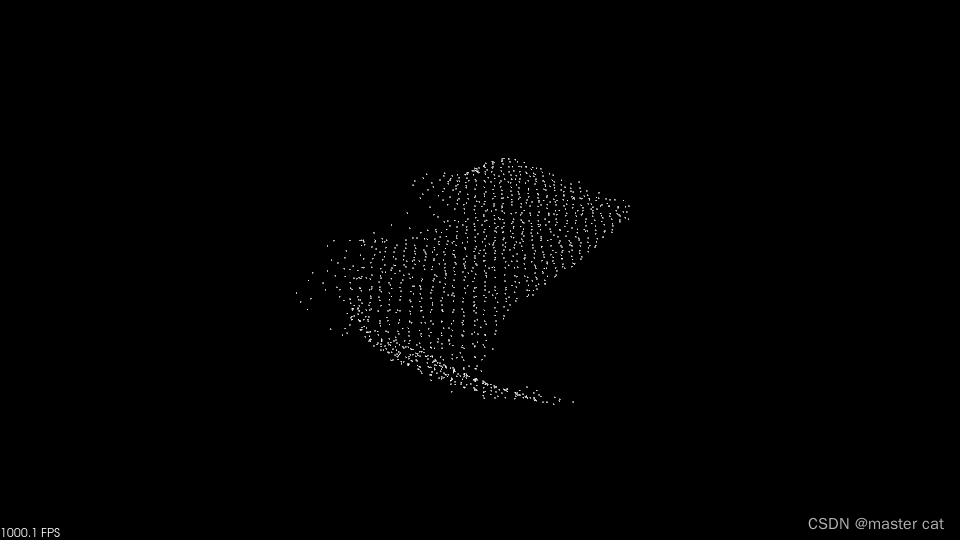
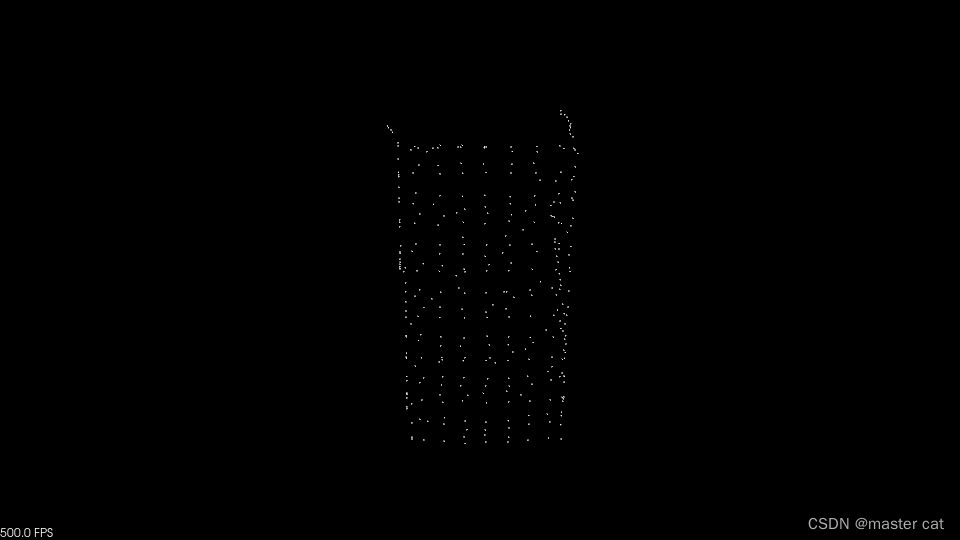
聚类后得到五个点云















 344
344

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









