







 本文介绍了多目标跟踪技术在复杂环境下的应用,如导弹制导和视频监控,并聚焦于GM-PHD滤波器在目标状态估计中的作用。通过权值阈值筛选,代码展示了如何估计目标状态。同时,提供了可视化结果展示目标轨迹。关键词涉及颜色直方图、直方图方向梯度和协方差描述符等目标表征方式。
本文介绍了多目标跟踪技术在复杂环境下的应用,如导弹制导和视频监控,并聚焦于GM-PHD滤波器在目标状态估计中的作用。通过权值阈值筛选,代码展示了如何估计目标状态。同时,提供了可视化结果展示目标轨迹。关键词涉及颜色直方图、直方图方向梯度和协方差描述符等目标表征方式。
1 内容介绍
多目标跟踪u是指在嘈杂观测、杂波以及不确定检测的情况下,对目标的数量以及它们的状态进行联合估计,其在机器视觉或模式识别等领域应用广泛,如导弹制导、气象领域的云图分析、道路视频监控等。在这些系统中,有很多不确定因素和外部条件,如何获得稳定有效的跟踪器滤波器是工程设计和算法分析的关键。很多研究者就该问题进行了研究,表征目标的形式也有很多种,如颜色直方图、直方图方向梯度和协方差描述符等。根据这些特性可分为2种方案:整体方法和基于子空间的方法
2 部分代码
function x=PHD_ESTIMATE(x_filter,k)
x=[];
for i=1:x_filter.J
if x_filter.w(i)>0.5 %0.5叫做权值阈值 把大于权值阈值分量的高斯分量的均值作为目标状态的估计
for j=1:round(x_filter.w(i))
x=[x,x_filter.m(:,i)];
end
end
end
%================画图================
a=size(x,2);
figure(1)
if a~=0
plot(x(1,:),x(3,:),'ko','MarkerSize',5),hold on
end
figure(4)
subplot(2,1,1)
plot(k,x(1,:),'ko','MarkerSize',5);
hold on
subplot(2,1,2)
plot(k,x(3,:),'ko','MarkerSize',5);
hold on
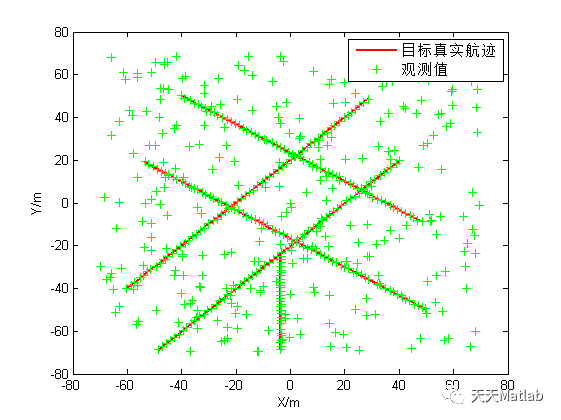
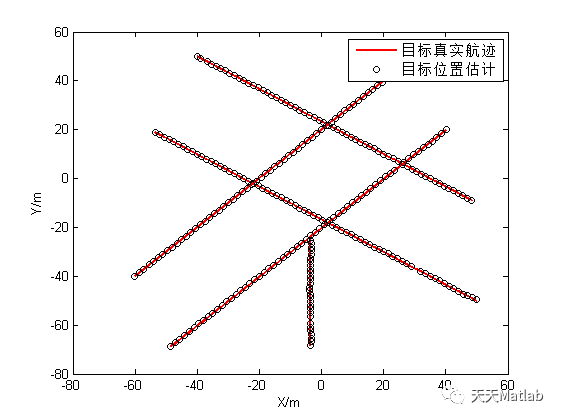
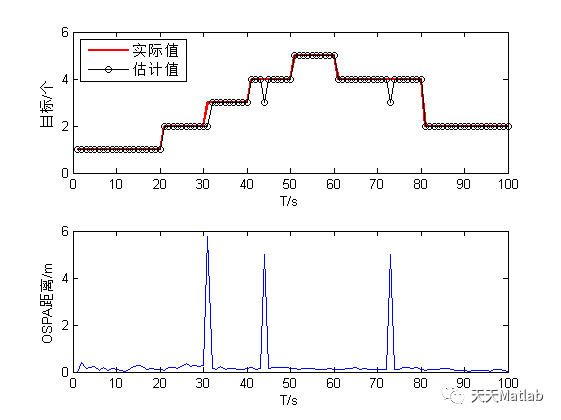
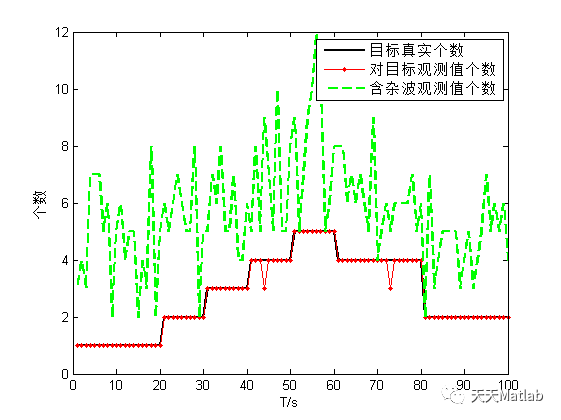
3 运行结果
4 参考文献
[1]朱宗斌, 陶剑锋, 葛辉良,等. 一种基于GM-PHD滤波的纯方位多目标跟踪方法研究[C]// 2016'中国西部声学学术交流会论文集. 2016.


















 793
793

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











