







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
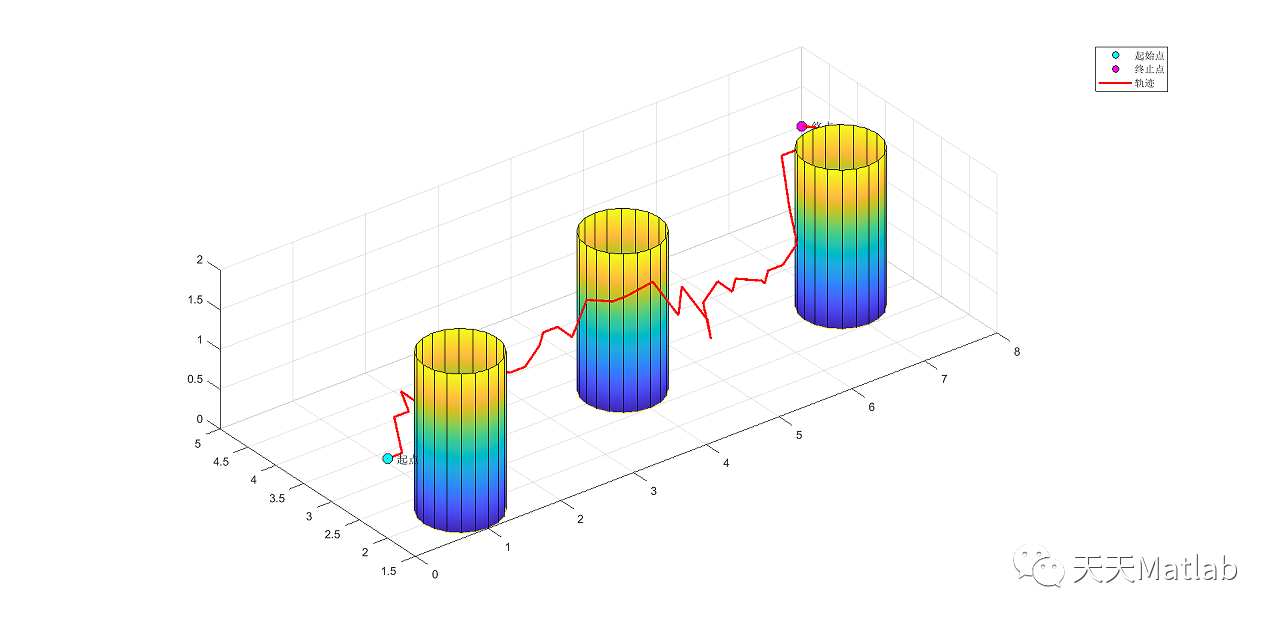
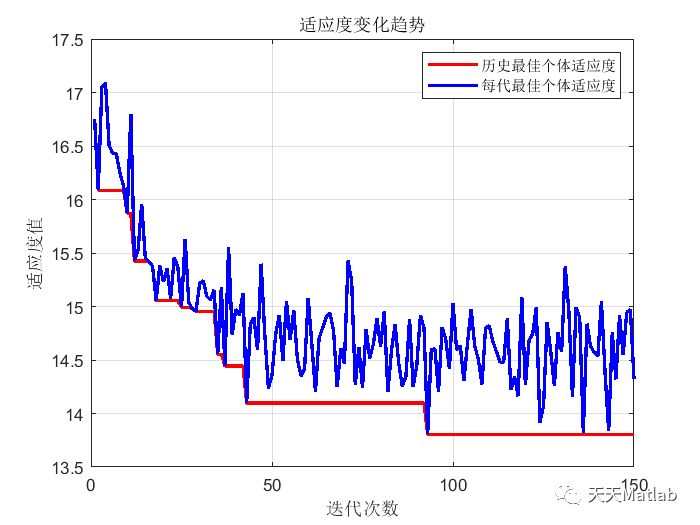
现如今,无人机应用的关键技术无外于乎航迹规划算法.基于这个现状,该文将针对无人机航迹规划进行系统研究,构建了无人机航迹规划的空间模型,在此之中结合蚁群算法,保证规划的真实可靠性.考虑到现在无人机应用的复杂以及不能完全利用有效空间的问题,提出以蚁群算法为基础的一种新型的航迹规划方法,并在其中考虑到地形,约束条件等外部因素,因此保证了航迹可以在现实中应用.最后,阐述了无人机航迹规划面临的关键问题及未来发展趋势.
⛄ 部分代码
function h = calHeuristicValue(now, next, goal, x, deltaX, obstacleMatrix, RobstacleMatrix,...
cylinderMatrix, cylinderRMatrix, cylinderHMatrix)
% 判断下一个坐标点是否碰撞,若碰撞则将启发值置为0,在后续的轮盘赌点位选择时将不可能被选中
nextXYZ = [x, next];
flag = checkCol(nextXYZ, obstacleMatrix, RobstacleMatrix, cylinderMatrix, cylinderRMatrix, cylinderHMatrix);
% 计算启发值
d1 = getDist([x - deltaX, now], [x, next]);
d2 = getDist([x, next], goal);
D = 50 / (d1 + d2);
h = flag * D;
end
⛄ 运行结果
⛄ 参考文献
[1]沈培志, 张邦钰, 聂奇刚,等. 基于蚁群算法的无人机航路规划辅助决策研究[J]. 四川兵工学报, 2015, 36(8):4.
[2]王绪芝, 姚敏, 赵敏,等. 基于蚁群算法的无人机航迹规划及其动态仿真[J]. 指挥控制与仿真, 2012, 34(1):4.
❤️ 关注我领取海量matlab电子书和数学建模资料
❤️部分理论引用网络文献,若有侵权联系博主删除
















 298
298











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











