






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
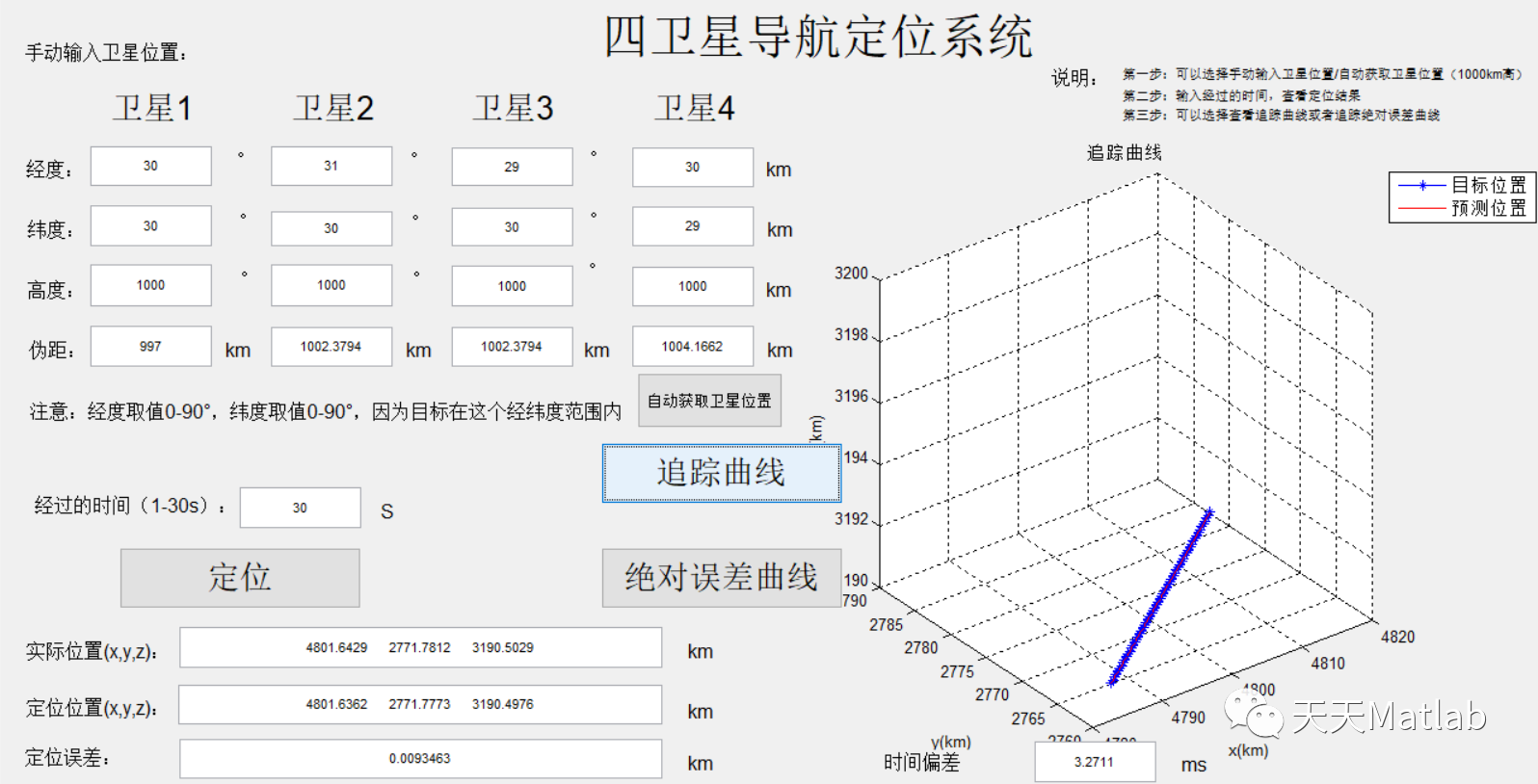
基于频差定位(Differential Doppler Positioning)一种利用卫星导航系统测量接收机位置的技术。在四卫星导航定位系统中,通过同时接收来自至少四颗卫星的信号,并测量其频率差异来实现定位。以下是基于频差定位实现四卫星导航定位系统的一般步骤:
-
接收卫星信号:使用接收机接收来自至少四颗卫星的导航信号。这些信号包含了卫星的导航信息和时间标记。
-
频差测量:将接收到的卫星信号与本地参考信号进行比较,测量不同卫星之间的频率差异。通常,这可以通过对信号进行频谱分析或相关运算来实现。
-
绝对范围计算:根据接收到的频差以及每颗卫星的导航信息,计算接收机与每颗卫星之间的绝对距离。这需要使用多普勒效应等相关公式计算。
-
定位解算:利用已知卫星的位置信息和接收机与卫星之间的距离,使用三。常用的定位算法包括最小二乘(Least Squares)解算、加权解算等。
输出接收机的位置坐标和相关的误差估计。这通常以地理坐标系(如经度、纬度、海拔)或其他参考坐标系统表示。
需要注意的是,基于频差定位的精度受到多种因素的影响,如信号传播路径、多径效应、接收机性能、卫星几何配置等。为了提高精度和可靠性,可以采取一些增强策略,例如采用差分定位、使用更多的卫星进行定位、采集更高频率的测量数据等。
对于实际的导航定位应用系统,还需要考虑数据处理和误差补偿技术、姿态信息、考虑,以获得更精确的导航位置信息。
⛄ 部分代码
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%多普勒频率变化率/频差(多普勒频率)s、kHz、km、km/%%%%%%%%%%%%%%%注意:载机位置和目标位置,载机和目标的速度差值愈大越好%%%%%%%%%%%%%%%固定的比较好,因为速度差值比较大%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function [Xk,m]=pc(xii,x,y,z,vx,vy,vz,xo1,yo1,zo1,xo2,yo2,zo2,xo3,yo3,zo3,xo4,yo4,zo4,vxo1,vyo1,vzo1,vxo2,vyo2,vzo2,vxo3,vyo3,vzo3,vxo4,vyo4,vzo4,N)%目标位置clear all;clc;T=1;N=60/T;R=6378;j0=30*(2*pi)/(360);w0=30*(2*pi)/(360);H0=3;%360度转化为2pix=(R+H0)*cos(w0)*cos(j0);y=(R+H0)*cos(w0)*sin(j0);z=(R+H0)*sin(w0);xii=[x(1);y(1);z(1)];%目标初始位置vv=(R+H0)*cos(w0)*2*pi/(24*60*60);%地球自转产生的线速度即速度vx=vv*cos(j0);vy=vv*sin(j0);vz=0;%地球自转产生的线速度即速度的各个方向的分量vx=0.2+vx;vy=0.1+vy;vz=0.0001+vz;%假设目标飞机的速度为(0.2,,01,0.0001)for i=1:N-1%目标飞机真实轨迹x(i+1)=x(i)+vx*T;y(i+1)=y(i)+vy*T;z(i+1)=z(i)+vz*T;end%卫星位置,计算思想同上%卫星的位置jo1=30*(2*pi)/(360);wo1=30*(2*pi)/(360);H1=1000;jo2=31*(2*pi)/(360);wo2=30*(2*pi)/(360);H2=1000;jo3=29*(2*pi)/(360);wo3=30*(2*pi)/(360);H3=1000;jo4=30*(2*pi)/(360);wo4=29*(2*pi)/(360);H4=1000;x1=(R+H1)*cos(wo1)*cos(jo1);y1=(R+H1)*cos(wo1)*sin(jo1);z1=(R+H1)*sin(wo1);x2=(R+H2)*cos(wo2)*cos(jo2);y2=(R+H2)*cos(wo2)*sin(jo2);z2=(R+H2)*sin(wo2);x3=(R+H3)*cos(wo3)*cos(jo3);y3=(R+H3)*cos(wo3)*sin(jo3);z3=(R+H3)*sin(wo3);x4=(R+H4)*cos(wo4)*cos(jo4);y4=(R+H4)*cos(wo4)*sin(jo4);z4=(R+H4)*sin(wo4);xo1=x1;yo1=y1;zo1=z1;xo2=x2;yo2=y2;zo2=z2;xo3=x3;yo3=y3;zo3=z3;xo4=x4;yo4=y4;zo4=z4;%假设卫星在一段时间位置没有改变,获得与目标飞机运动点数相同的点数(保证数组维度相同)for i=1:N-1xo1=[xo1,x1];yo1=[yo1,y1];zo1=[zo1,z1];xo2=[xo2,x2];yo2=[yo2,y2];zo2=[zo2,z2];xo3=[xo3,x3];yo3=[yo3,y3];zo3=[zo3,z3];xo4=[xo4,x4];yo4=[yo4,y4];zo4=[zo4,z4];x_40=xo4*10^3; y_40=yo4*10^3;z_40=zo4*10^3;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 仿真%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%计算多普勒频率%%%%%%估计值?%%%%%%%%%%%%%%%%初值%%%%%%%%%%%%%%%Xk=zeros(3,N);Xk(:,1)=xii*10^3;%参考位置(初值很重要)!!!!!!!!!!!!!!!!!!!!f0=6*10^9;%目标飞机固有频率c=3*10^8;TT=0.1;%阈值%%%%%阈值if max(abs(D))<TTnum=MM;elsenum=num+1;endendXk(:,i)=X_hat+[0;0;5.43];% Xk(i+1,:)=Xk(i,:)+((inv(H'*H))*H'*(Fd(:,i)-Fd0))';enddt=(sqrt((x(5)-x1*1000)^2+(y(5)-y1*1000)^2+(z(5)-z1*1000)^2))/c% Xk(:,i)=%追踪曲线figure(2)plot3(x,y,z,'b*-');xlabel('x(m)');ylabel('y(m)');zlabel('z(m)');grid on;hold onplot3(Xk(1,:),Xk(2,:),Xk(3,:),'r-');legend('目标位置','预测位置');xlabel('x(m)');ylabel('y(m)');zlabel('z(m)');axis([4.78e6 4.82e6 2.76e6 2.79e6 3.19e6 3.20e6]);m=sqrt((Xk(1,:)-x).^2+(Xk(2,:)-y).^2+(Xk(3,:)-z).^2);mx=Xk(1,:)-x;my=Xk(2,:)-y;mz=Xk(3,:)-z;m(1)=m(2);%绝对误差曲线figure(3)plot(m,'b--');xlabel('t');ylabel('误差(m)');axis([0 30 5 10]);% figure(4)% plot(mx,'b--');% xlabel('t');% ylabel('误差(m)');%% figure(5)% plot(my,'b--');% xlabel('t');% ylabel('误差(m)');%% figure(6)% plot(mz,'b--');% xlabel('t');% ylabel('误差(m)');
⛄ 运行结果

⛄ 参考文献
[1] 胡传君.基于Matlab/STK的GPS/BDS双模卫星导航实验系统设计与实现[D].广西师范大学[2023-06-29].
[2] 周鹏,张更新,屈德新.单星频差无源定位的MATLAB与STK仿真研究[C]//第十六届卫星通信学术年会.0[2023-06-29].
[3] 宋俊鹏.基于Matlab全球定位系统空间部分仿真[J].电子测量技术, 2004(4):2.DOI:10.3969/j.issn.1002-7300.2004.04.007.















 6945
6945











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











