







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
1. 雷达信号采集
雷达信号采集是雷达系统的重要组成部分,其主要任务是将雷达天线接收到的电磁波信号转换成可供雷达信号处理系统处理的数字信号。雷达信号采集系统一般由天线、接收机、模数转换器和数据存储器等组成。
天线负责接收雷达目标反射的电磁波信号,并将其转换成电信号。接收机负责放大和滤波天线接收到的电信号,并将其转换成中间频率信号。模数转换器负责将中间频率信号转换成数字信号。数据存储器负责将数字信号存储起来,以便雷达信号处理系统进行处理。
2. 雷达信号数据处理
雷达信号数据处理是雷达系统的重要组成部分,其主要任务是将雷达信号采集系统采集到的数字信号进行处理,提取出雷达目标的信息。雷达信号数据处理系统一般由信号预处理、目标检测、目标跟踪和数据融合等组成。
信号预处理主要包括滤波、去噪和数据压缩等。滤波可以去除雷达信号中的噪声和干扰,提高信噪比。去噪可以去除雷达信号中的噪声,提高雷达目标的检测性能。数据压缩可以减少雷达信号的数据量,提高雷达信号处理系统的处理效率。
目标检测主要包括恒虚警检测、自适应门限检测和相关检测等。恒虚警检测是一种最简单的目标检测方法,其基本原理是将雷达信号的幅度与一个预设的阈值进行比较,如果雷达信号的幅度大于阈值,则认为存在雷达目标。自适应门限检测是一种改进的恒虚警检测方法,其基本原理是根据雷达信号的噪声水平动态调整阈值,以提高雷达目标的检测性能。相关检测是一种基于相关性的目标检测方法,其基本原理是将雷达信号与一个预先知道的模板进行相关运算,如果相关值大于一个预设的阈值,则认为存在雷达目标。
目标跟踪主要包括卡尔曼滤波、粒子滤波和无迹卡尔曼滤波等。卡尔曼滤波是一种最常用的目标跟踪方法,其基本原理是利用雷达信号对雷达目标的状态进行估计,并根据估计值预测雷达目标的未来状态。粒子滤波是一种改进的卡尔曼滤波方法,其基本原理是利用一组粒子来表示雷达目标的状态,并根据雷达信号对粒子进行更新。无迹卡尔曼滤波是一种改进的卡尔曼滤波方法,其基本原理是利用雷达信号对雷达目标的状态进行估计,并利用估计值预测雷达目标的未来状态,而不需要对雷达目标的状态进行显式的估计。
数据融合主要包括卡尔曼滤波、粒子滤波和无迹卡尔曼滤波等。卡尔曼滤波是一种最常用的数据融合方法,其基本原理是利用多个传感器的数据对雷达目标的状态进行估计,并根据估计值预测雷达目标的未来状态。粒子滤波是一种改进的卡尔曼滤波方法,其基本原理是利用一组粒子来表示雷达目标的状态,并根据多个传感器的数据对粒子进行更新。无迹卡尔曼滤波是一种改进的卡尔曼滤波方法,其基本原理是利用多个传感器的数据对雷达目标的状态进行估计,并利用估计值预测雷达目标的未来状态,而不需要对雷达目标的状态进行显式的估计。
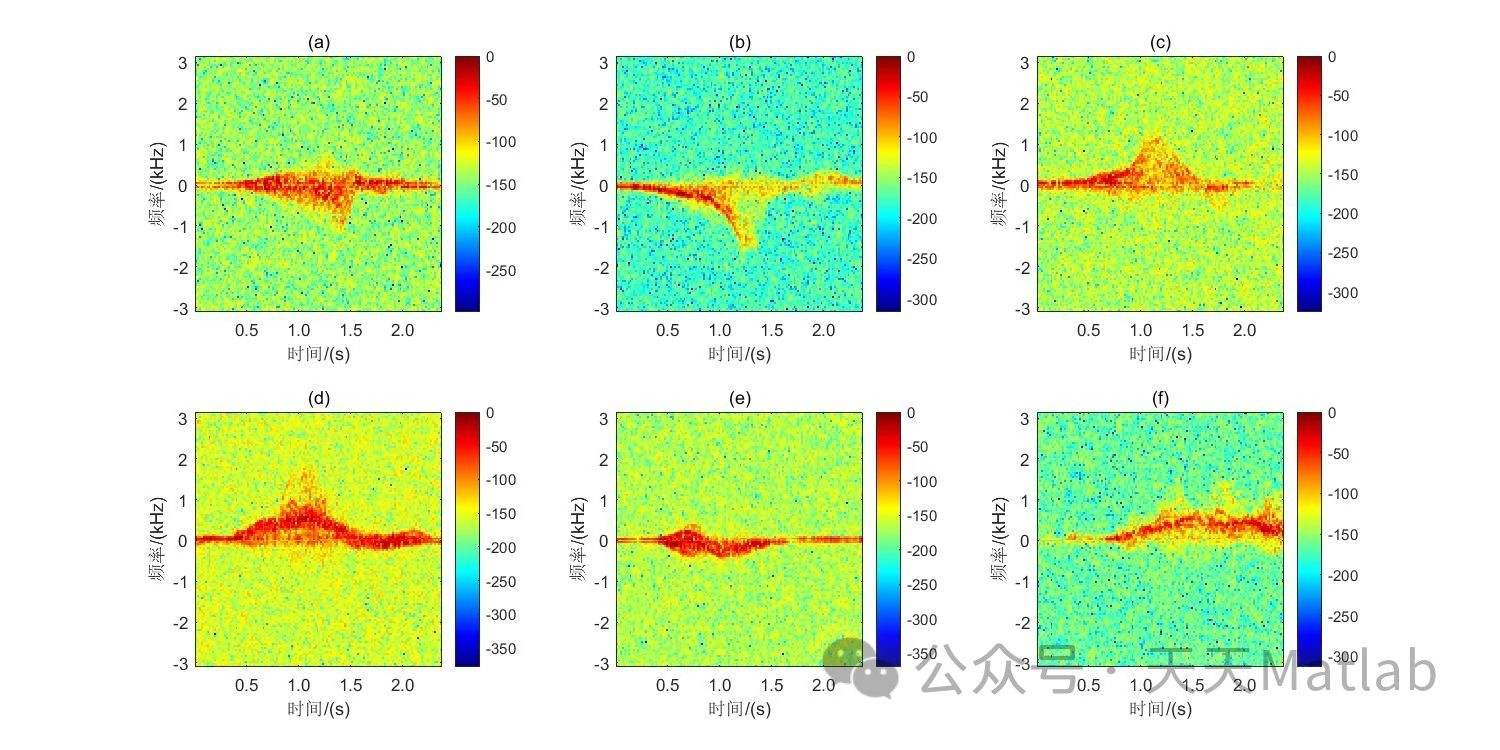
3. 时频谱图
时频谱图是雷达信号数据处理中常用的工具,其基本原理是将雷达信号的时域信号转换成时频域信号,并将其以图像的形式显示出来。时频谱图可以直观地显示雷达信号的时频分布,并可以从中提取出雷达目标的信息。
时频谱图的生成方法有很多种,常用的方法有短时傅里叶变换、小波变换和希尔伯特-黄变换等。短时傅里叶变换是一种最常用的时频谱图生成方法,其基本原理是将雷达信号的时域信号分成一段一段的短时信号,并对每一段短时信号进行傅里叶变换,然后将每一段短时信号的傅里叶变换结果以图像的形式显示出来。小波变换是一种改进的短时傅里叶变换方法,其基本原理是利用小波基函数对雷达信号的时域信号进行分解,然后将分解后的信号以图像的形式显示出来。希尔伯特-黄变换是一种改进的小波变换方法,其基本原理是利用希尔伯特-黄变换对雷达信号的时域信号进行分解,然后将分解后的信号以图像的形式显示出来。
时频谱图可以用于雷达目标的检测、跟踪和分类等。雷达目标的检测可以通过时频谱图中雷达目标的能量聚集区域来实现。雷达目标的跟踪可以通过时频谱图中雷达目标的运动轨迹来实现。雷达目标的分类可以通过时频谱图中雷达目标的时频特征来实现。
📣 部分代码
clear, clc%% 绘制雷达信号处理结果图% 定义文件名称filenames = {'fall_aside_Sxx_1602.csv', ...'fall_backward_Sxx_1602.csv', ...'fall_forward_Sxx_1601.csv', ...'jump_Sxx_1601.csv', ...'sit_Sxx_1602.csv', ...'walk_Sxx_1602.csv'};% 定义标题名称titles = {'(a)', '(b)', '(c)', '(d)', '(e)', '(f)'};% 读取时间向量和频率刻度t = load('./radar_time.csv');f = load('./radar_freq.csv');% 初始化画布figure(1)set(gcf, 'position', [100, 100, 1200, 600])
⛳️ 运行结果
4. 结语
雷达信号采集数据处理是雷达系统的重要组成部分,其主要任务是将雷达信号采集系统采集到的数字信号进行处理,提取出雷达目标的信息。时频谱图是雷达信号数据处理中常用的工具,其基本原理是将雷达信号的时域信号转换成时频域信号,并将其以图像的形式显示出来。时频谱图可以直观地显示雷达信号的时频分布,并可以从中提取出雷达目标的信息。
🔗 参考文献
[1] 刘萌.圆柱阵雷达数据采集处理与波束形成[D].南京理工大学[2024-01-14].
[2] 文心怡,李静,梁广宇,等.基于MATLAB的陆基激光雷达信号分析[J].智能计算机与应用, 2020.DOI:10.3969/j.issn.2095-2163.2020.09.024.
















 115
115











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











