







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
随着智能手机的普及,手机传感器在运动识别领域得到了广泛应用。IMU(惯性测量单元)是手机中常见的传感器,它可以测量手机的三轴加速度和角速度。基于IMU数据分析的手机运动识别技术,能够识别用户各种运动状态,例如行走、跑步、跳跃等,并能用于健康监测、运动分析等应用。
一、IMU数据分析
IMU数据分析主要包括以下几个步骤:
-
数据预处理: 由于IMU数据容易受到噪声和漂移的影响,需要进行数据预处理,例如滤波和去漂移等。
-
特征提取: 从预处理后的IMU数据中提取运动特征,例如加速度幅值、角速度幅值、加速度方向、角速度方向等。
-
运动识别: 基于提取的运动特征,利用机器学习算法识别用户的运动状态。
二、滤波跟踪
滤波跟踪技术可以有效地消除IMU数据中的噪声和漂移,提高运动识别精度。常用的滤波方法包括卡尔曼滤波、互补滤波等。
卡尔曼滤波是一种最优线性滤波器,它可以根据IMU数据和运动模型预测手机的姿态,并利用测量数据进行修正。
互补滤波是一种融合加速度计和陀螺仪数据的滤波方法,它可以利用加速度计的低频精度和陀螺仪的高频精度,实现对手机姿态的准确估计。
三、基于IMU数据分析的手机运动识别
基于IMU数据分析的手机运动识别技术,可以识别用户各种运动状态,例如行走、跑步、跳跃等。
1. 步行识别
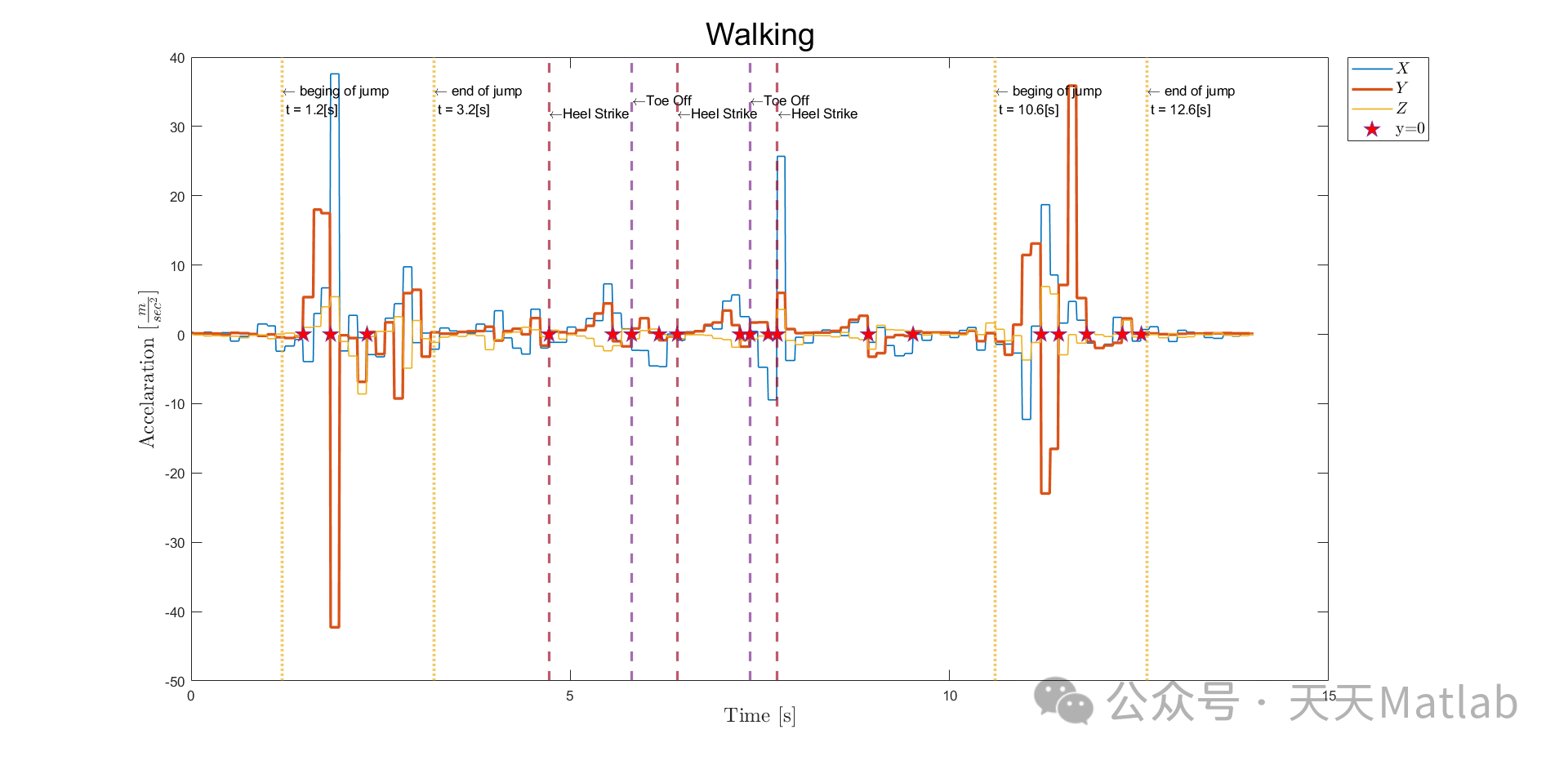
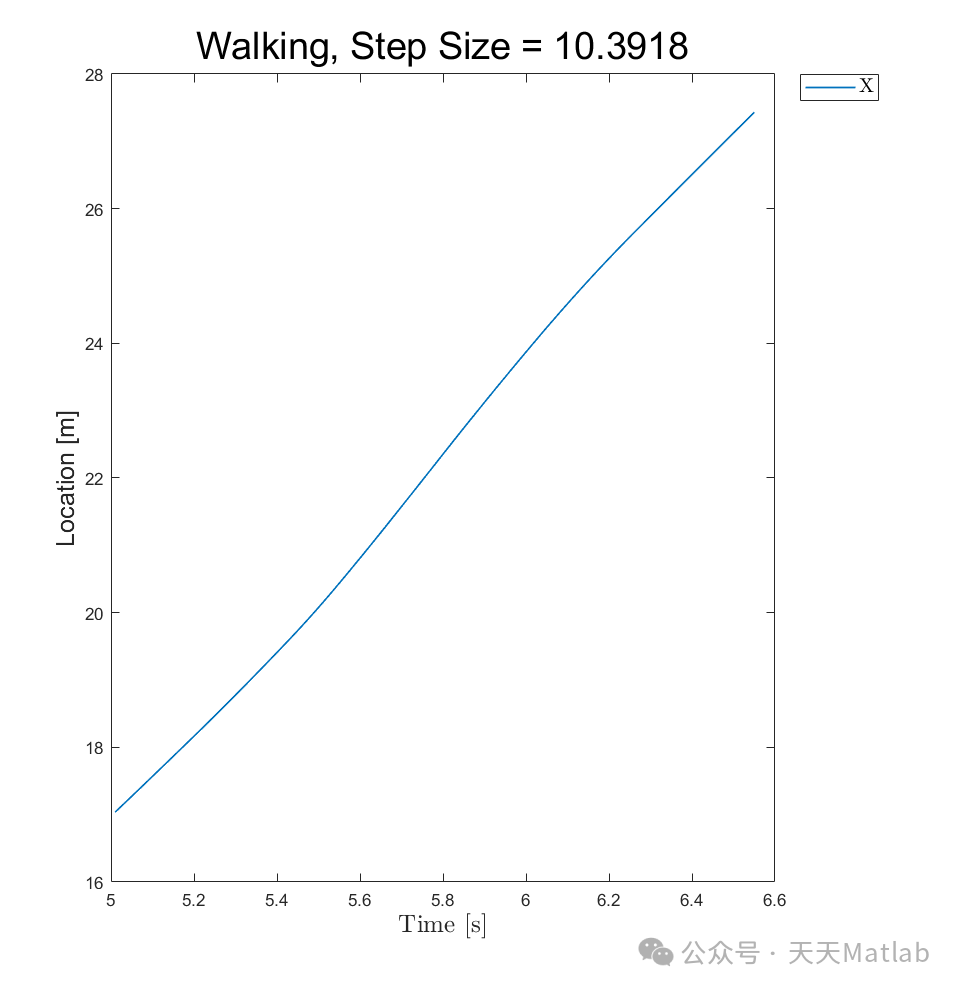
步行识别是基于IMU数据分析的手机运动识别中最常见的一种应用。通过分析加速度数据,可以识别用户的步频、步长等信息,并计算用户的步行距离和速度。
2. 跑步识别
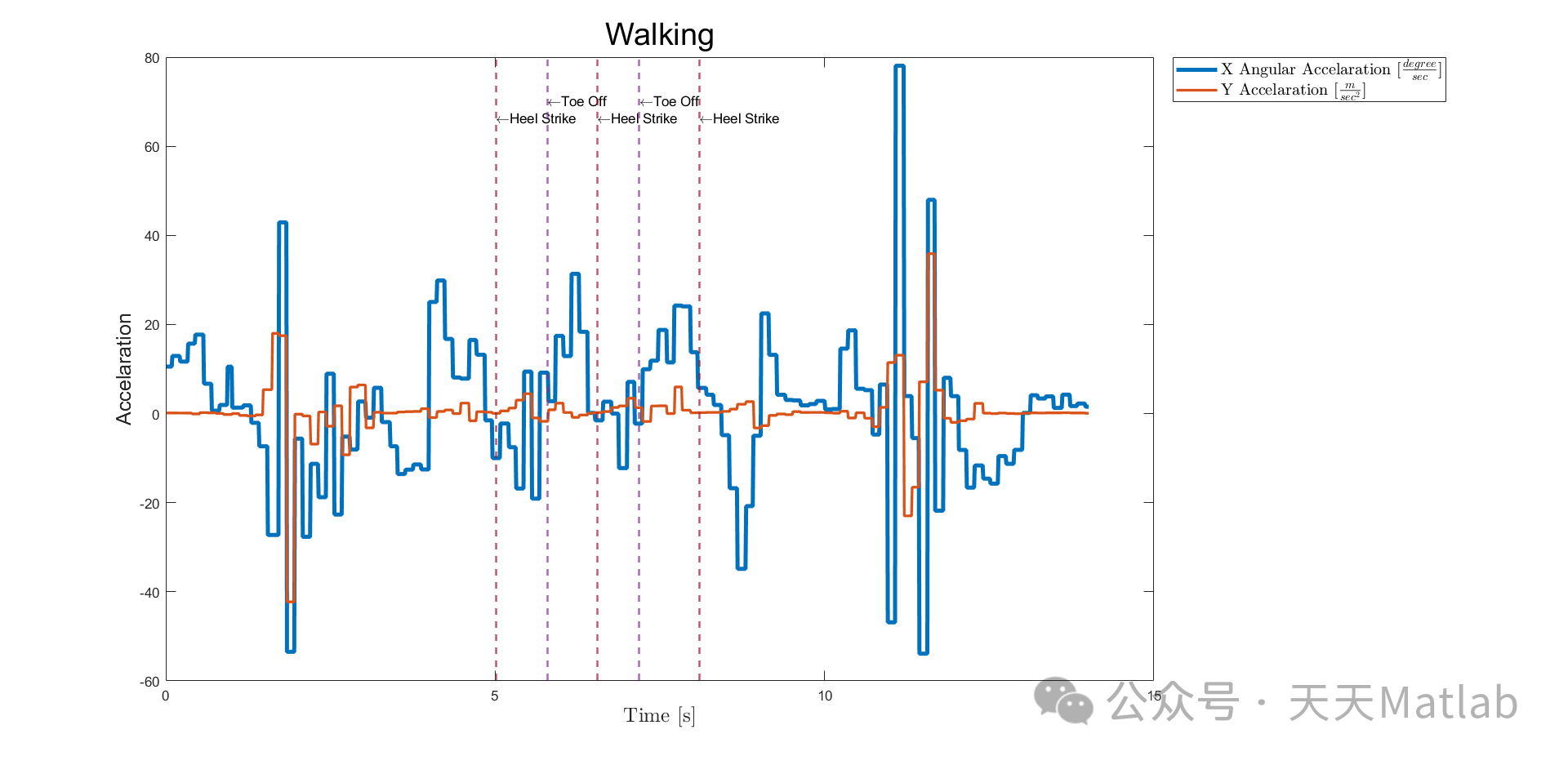
跑步识别与步行识别类似,但需要考虑跑步过程中加速度和角速度的变化更大。通过分析加速度和角速度数据,可以识别用户的跑步速度、步频等信息,并计算用户的跑步距离和时间。
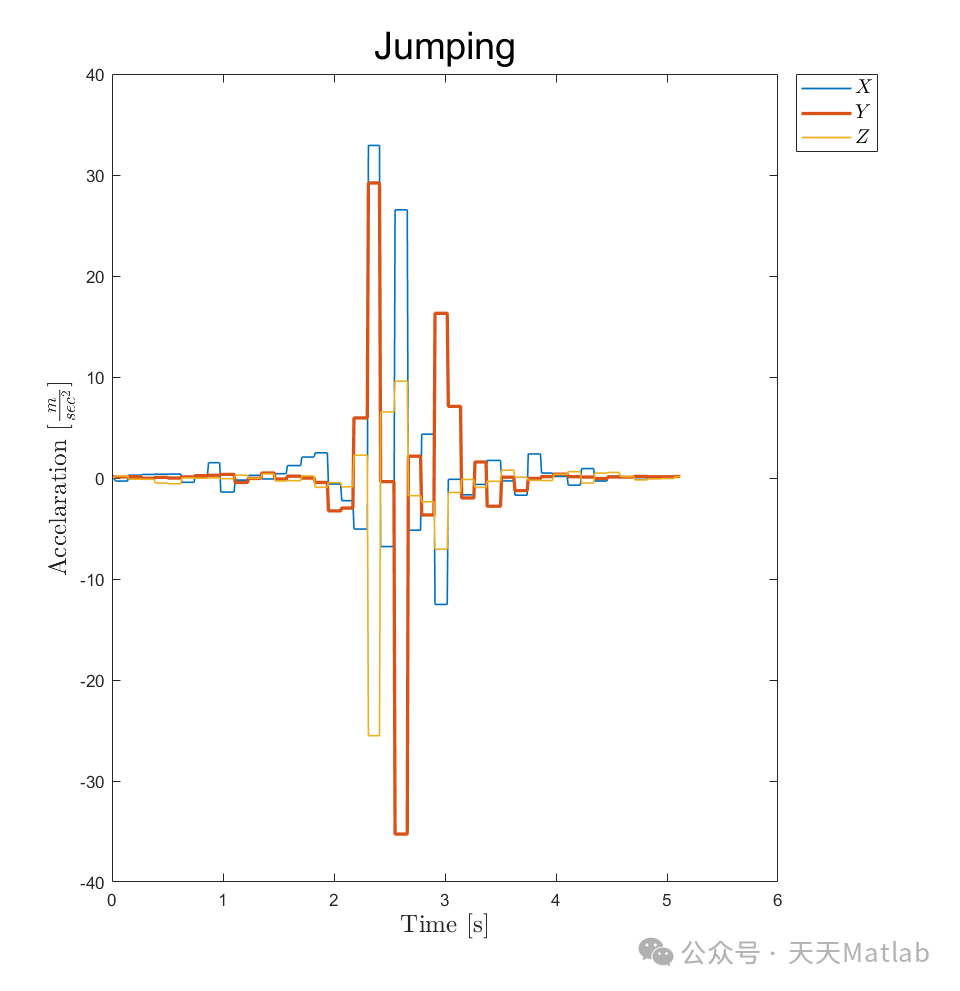
3. 跳跃识别
跳跃识别需要分析加速度数据和角速度数据,识别用户的起跳和落地动作。通过分析加速度和角速度的峰值,可以识别用户的跳跃高度和距离。
四、应用
基于IMU数据分析的手机运动识别技术可以应用于以下几个方面:
1. 健康监测
手机运动识别技术可以用于监测用户的运动量、运动强度等信息,并根据用户的运动情况提供健康建议。
2. 运动分析
手机运动识别技术可以用于分析用户的运动姿态、运动轨迹等信息,并根据用户的运动数据提供运动指导。
3. 游戏娱乐
手机运动识别技术可以用于开发各种运动类游戏,例如跑步游戏、跳跃游戏等。
五、总结
基于IMU数据分析的手机运动识别技术是一种有效的运动识别方法,它可以识别用户各种运动状态,并能用于健康监测、运动分析等应用。随着智能手机的普及,手机运动识别技术将得到更加广泛的应用。
📣 部分代码
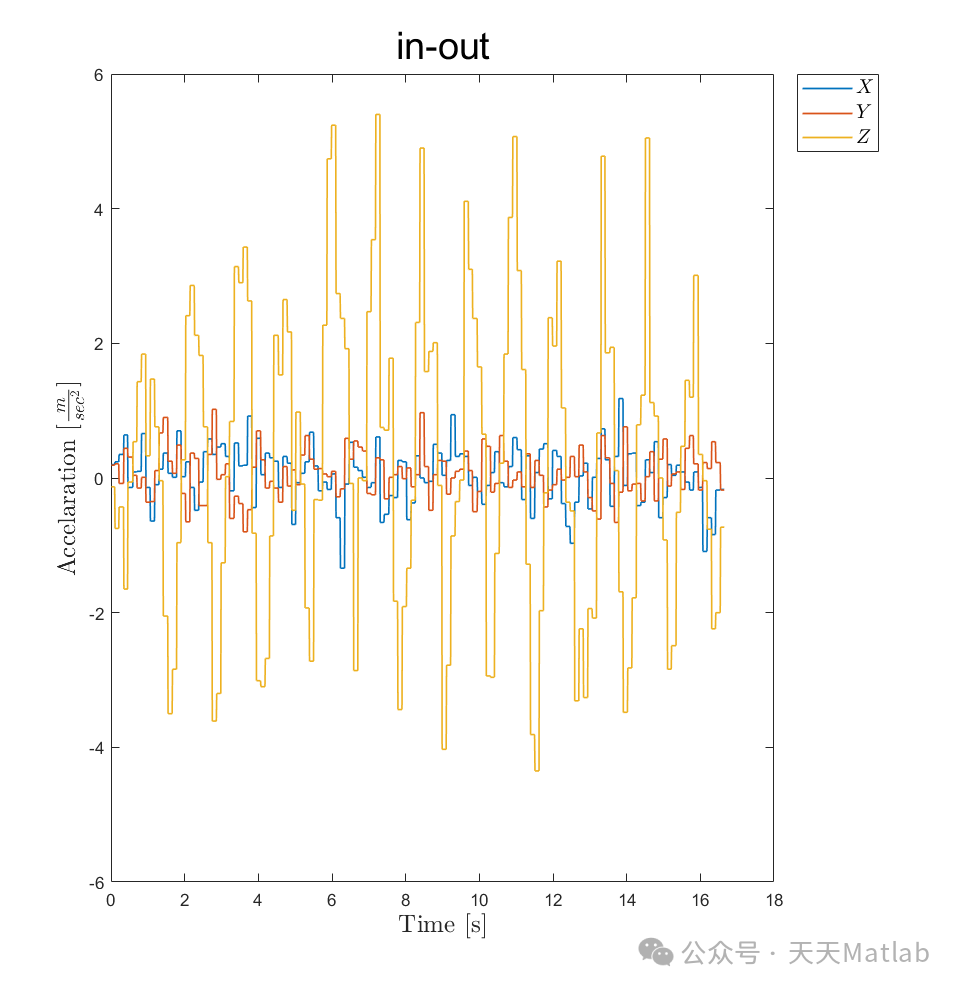
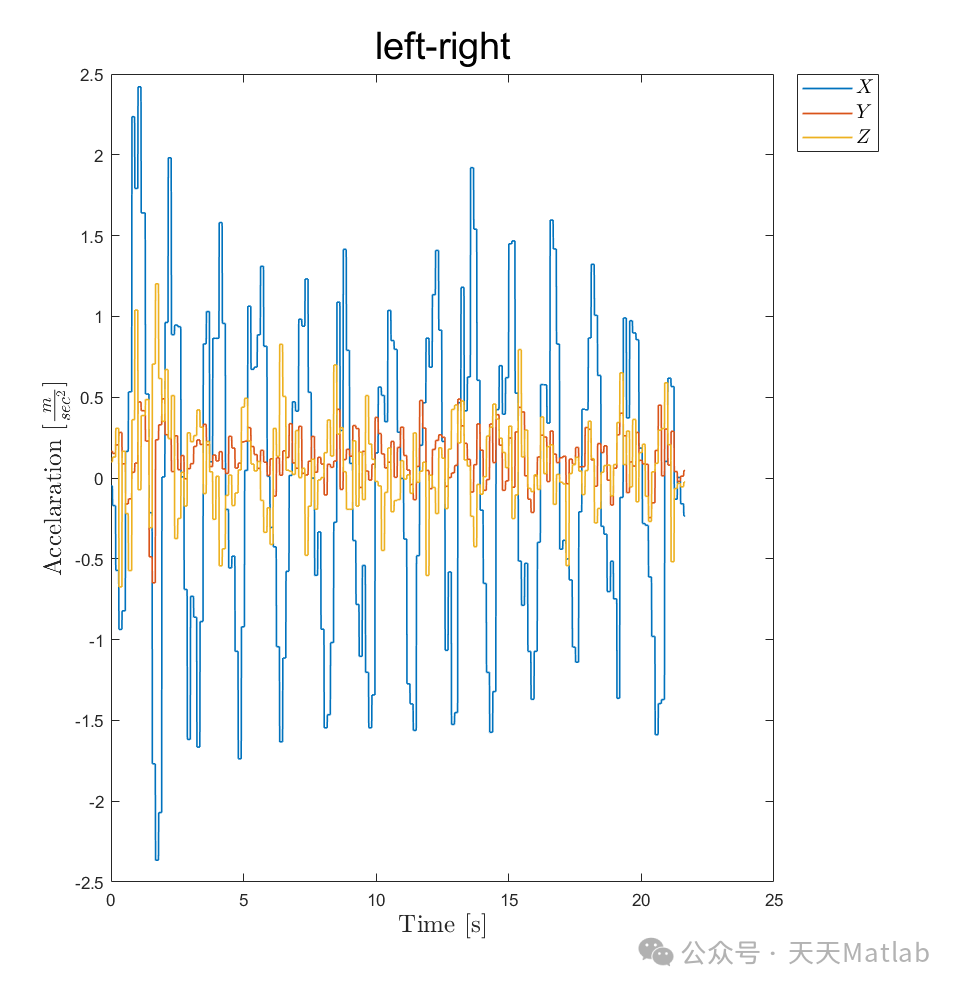
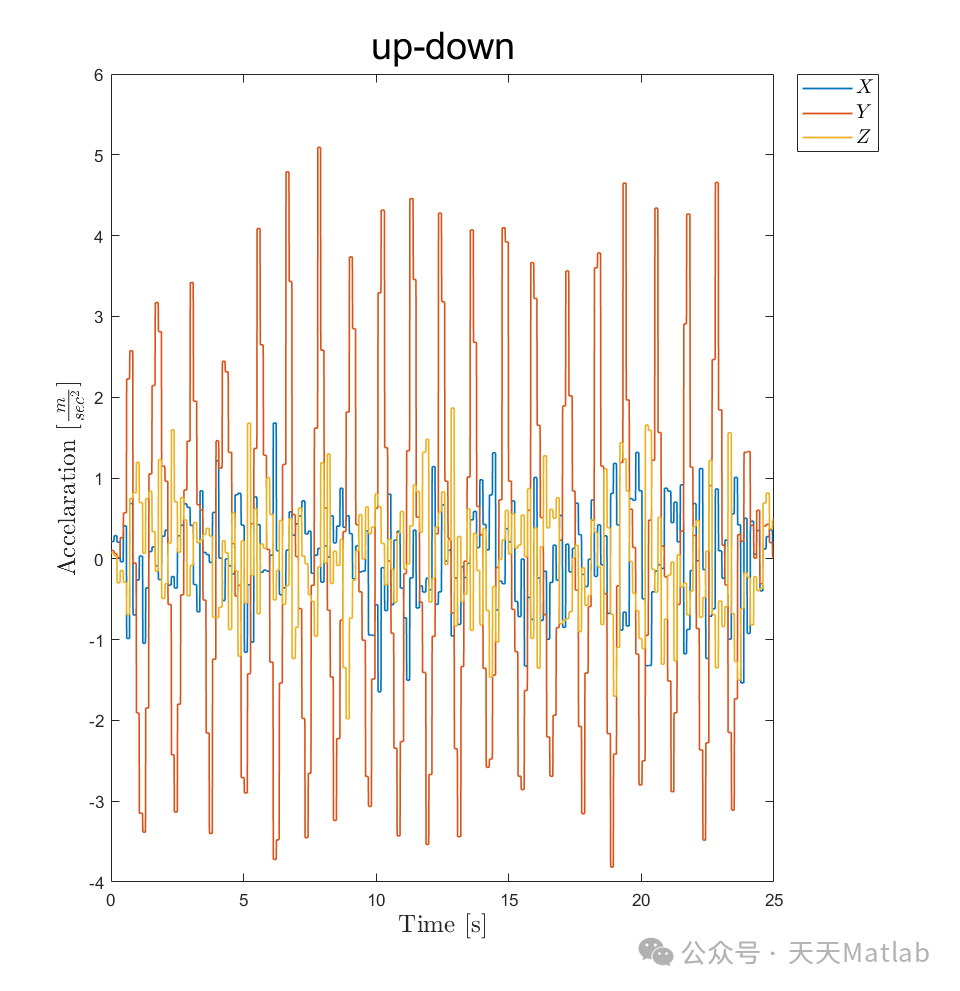
function Plot_Location(Table, plotName,Axis, Lim)names = struct('InOut','in-out','UpDown','up-down','LeftRight',...'left-right','Walk','Walking','Jump','Jumping');frame_rate = 1/100;tot_time = size(Table,1) * frame_rate;time_vec = frame_rate:frame_rate:tot_time;% time_vec = frame_rate+Lim(1):frame_rate:Lim(2);if nargin == 4ind1 = find(time_vec <= Lim(1));ind1 = ind1(end);ind2 = find(time_vec <= Lim(2));ind2 = ind2(end);window = ind1:ind2;elsewindow = 1:size(Table,1);endpos = [0 0 0.5 1]; % [ _ _ right upper]lgndFontsize = 12;lineW = 1;labelFont = 15;count = 1;legtxt = {};fig = figure('name',plotName,'Units','normalized','Position',pos);if contains(Axis,'x')plot(time_vec(window)', Table.LINEAR_ACC_LOC_X(window), 'LineWidth', lineW)legtxt{count} = 'X';count = count +1;endhold onif contains(Axis,'y')plot(time_vec(window)', Table.LINEAR_ACC_LOC_Y(window), 'LineWidth', lineW)legtxt{count} = 'Y';count = count +1;endif contains(Axis,'z')plot(time_vec(window)', Table.LINEAR_ACC_LOC_Z(window), 'LineWidth', lineW)legtxt{count} = 'Z';count = count +1;endhold offdist = Table.LINEAR_ACC_LOC_X(ind2) - Table.LINEAR_ACC_LOC_X(ind1);title([getfield(names,plotName), ', Step Size = ', num2str(dist)], ...'fontsize',labelFont*1.5);ylabel('Location [m]', 'fontsize',labelFont);xlabel('Time [s]', 'Interpreter','latex', 'fontsize',labelFont);Lgnd1 = legend(legtxt);Lgnd1.Interpreter = 'latex';Lgnd1.Location = 'northeastoutside';Lgnd1.FontSize = lgndFontsize;figName = ['/figures/',plotName,'_location.fig'];saveas(fig, [pwd figName]);end
⛳️ 运行结果
🔗 参考文献
[1] 王珂,王艳阳,黄秋实,等.基于高级运动模型轨迹预测的不确定性分析[J].[2024-04-26].
[2] 阳兆哲,李跃忠,吴光文.基于无迹卡尔曼滤波和小波分析的IMU传感器去噪技术研究[J].现代电子技术, 2024(005):047.
[3] 王冠.基于MATLAB/GUI的IMU数据解码分析系统[J].内蒙古科技与经济, 2020(17):3.
🎈 部分理论引用网络文献,若有侵权联系博主删除
🎁 关注我领取海量matlab电子书和数学建模资料
👇 私信完整代码和数据获取及论文数模仿真定制
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱船配载优化、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题
2 机器学习和深度学习方面
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN/TCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
















 420
420











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











