






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
无人机群凭借其灵活机动、协同作战等优势,在军事、民用等领域得到越来越广泛的应用。无人机群的航迹规划和碰撞检测是其高效协同的关键问题。本文提出了一种基于麻雀算法的分布式无人机群自适应航迹规划和碰撞检测方法。该方法利用麻雀算法的全局搜索能力和自适应性,对无人机群的航迹进行优化,同时引入碰撞检测机制,确保无人机群在飞行过程中安全高效地完成任务。
1. 引言
近年来,随着无人机技术的发展和应用,无人机群逐渐成为研究热点。无人机群由多个无人机组成,通过协同合作完成复杂的任务,具有灵活机动、成本低廉、易于部署等优势,在军事侦察、灾难救援、环境监测等领域有着广泛的应用前景。
无人机群的航迹规划和碰撞检测是其高效协同的关键问题。传统的集中式航迹规划方法需要将所有无人机的信息汇总到中心节点进行处理,存在通信延迟、单点故障等问题。而分布式航迹规划方法则利用每个无人机自身的计算能力和局部信息进行规划,具有更高的灵活性和鲁棒性。
近年来,许多智能优化算法被用于无人机群的航迹规划问题,例如遗传算法、粒子群算法、蚁群算法等。然而,这些算法在处理大规模无人机群时,往往存在收敛速度慢、容易陷入局部最优等问题。麻雀算法作为一种新兴的智能优化算法,具有较强的全局搜索能力和自适应性,在解决复杂优化问题方面表现出优异的性能。
本文将麻雀算法应用于分布式无人机群的航迹规划问题,提出了一种基于麻雀算法的自适应航迹规划和碰撞检测方法。该方法将麻雀算法的全局搜索能力与碰撞检测机制相结合,可以有效地解决无人机群在复杂环境下的航迹规划问题,并保证飞行安全。
2. 系统架构
本文提出的分布式无人机群自适应航迹规划和碰撞检测系统架构如图1所示。系统主要由以下模块组成:
-
环境感知模块: 通过传感器获取环境信息,例如障碍物位置、目标信息等,并建立环境模型。
-
航迹规划模块: 基于麻雀算法对无人机群的航迹进行优化,生成安全的、高效的飞行路径。
-
碰撞检测模块: 实时监测无人机之间的距离,避免发生碰撞。
3. 算法原理
3.1 麻雀算法
麻雀算法是一种模拟麻雀觅食和反捕食行为的群智能优化算法。算法中,每个麻雀个体代表一个候选解,通过不断地搜索和更新,最终找到最优解。麻雀算法主要包含以下三种行为:
-
觅食行为: 麻雀个体在觅食区域内随机搜索,寻找食物资源。
-
反捕食行为: 当发现捕食者时,麻雀个体迅速躲避,并向安全区域移动。
-
警戒行为: 麻雀个体之间相互警戒,及时发现捕食者,并发出警报。
3.2 自适应航迹规划
本文提出的自适应航迹规划算法将麻雀算法应用于无人机群的航迹优化。算法流程如下:
-
初始化: 设定无人机群的初始位置、目标位置、环境模型等参数。
-
生成种群: 随机生成多个麻雀个体,每个个体代表一个候选航迹。
-
适应度评价: 根据航迹的长度、安全性、效率等指标,计算每个个体的适应度值。
-
更新种群: 根据麻雀算法的觅食、反捕食和警戒行为,对种群进行更新,并生成新的候选航迹。
-
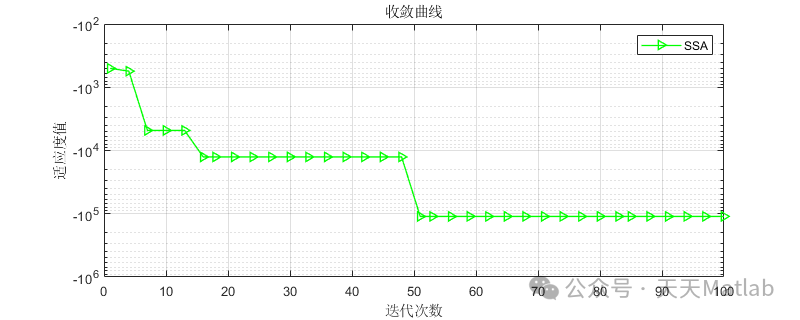
判断收敛: 当满足停止条件时,算法停止运行,并输出最优航迹。
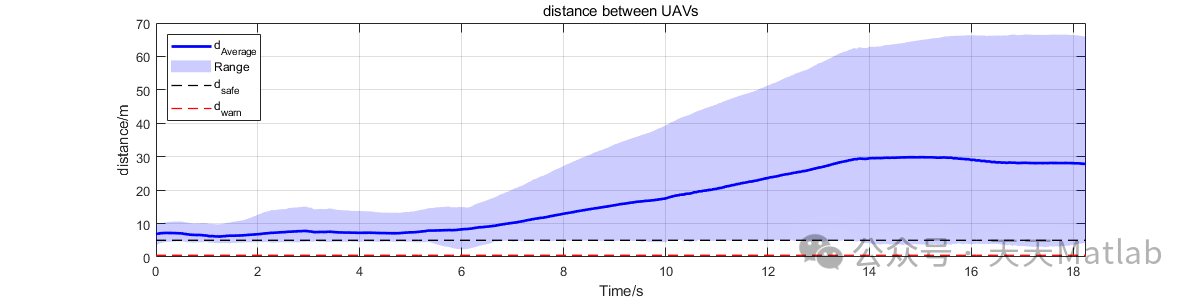
3.3 碰撞检测
为了避免无人机之间发生碰撞,本文采用了一种基于距离的碰撞检测机制。该机制实时监测无人机之间的距离,当两个无人机之间的距离小于安全距离时,发出警报,并对航迹进行调整,以确保安全飞行。
4. 实验仿真
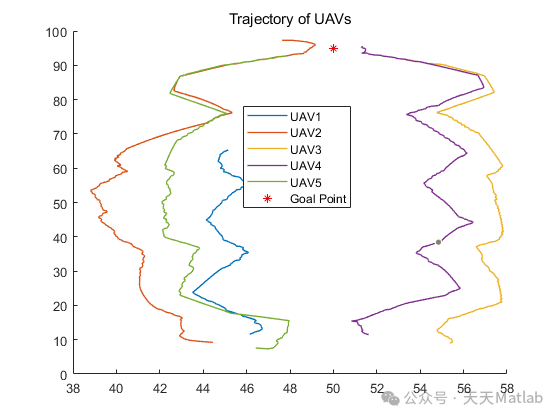
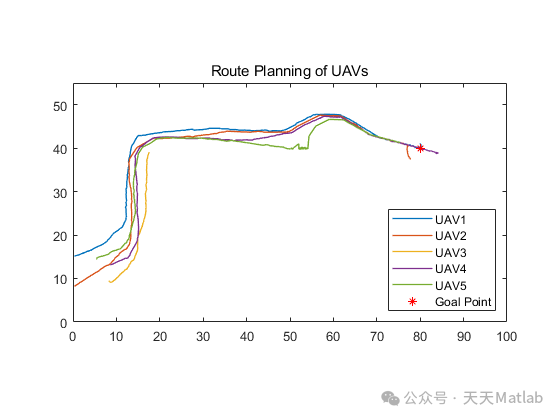
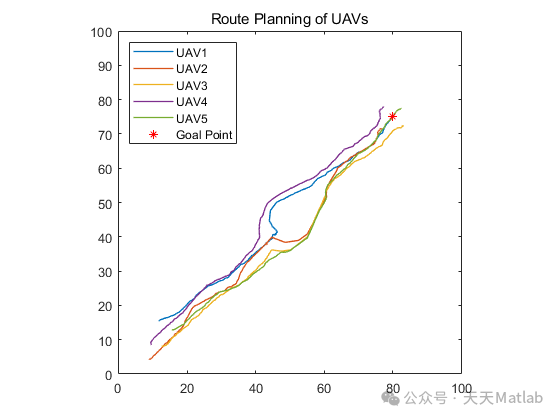
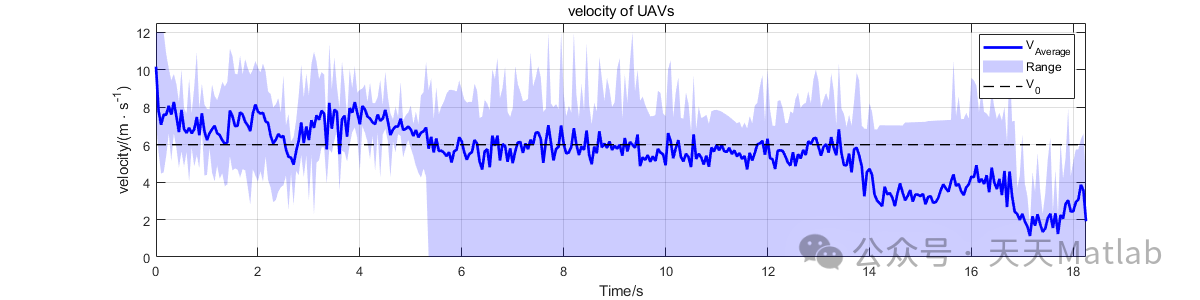
为了验证本文提出的算法的有效性,在模拟环境中进行了仿真实验。实验场景为一个包含多个障碍物和目标的区域,无人机群需要在安全高效地完成任务的同时,避免与障碍物和彼此发生碰撞。
实验结果表明,本文提出的算法可以有效地解决无人机群的航迹规划和碰撞检测问题。与传统的集中式航迹规划算法相比,该算法具有更高的灵活性和鲁棒性,能够适应更加复杂的飞行环境。
5. 总结与展望
本文提出了一种基于麻雀算法的分布式无人机群自适应航迹规划和碰撞检测方法。该方法利用麻雀算法的全局搜索能力和自适应性,对无人机群的航迹进行优化,同时引入碰撞检测机制,确保无人机群在飞行过程中安全高效地完成任务。实验结果表明,该方法能够有效地解决无人机群的航迹规划和碰撞检测问题。
未来,可以进一步研究以下方面:
-
将其他智能优化算法与麻雀算法相结合,提高算法的性能。
-
考虑多目标优化问题,例如在保证安全性的前提下,提高航迹效率和任务完成度。
-
将无人机群的航迹规划与协同控制相结合,实现更复杂的任务。
总之,无人机群技术拥有巨大的发展潜力,其应用范围也将不断拓展。本文提出的基于麻雀算法的自适应航迹规划和碰撞检测方法为无人机群的应用提供了新的思路,相信未来会有更加成熟、高效的无人机群控制技术出现。
⛳️ 运行结果
📣 部分代码
function [x_pred] = fourier_series_evaluate(a_,x)%FOURIER_SERIES_EVALUATE.M This function evaluates a Fourier series given the%Fourier series coefficients a_ and the parameterized value x.% Input variables%x - Parameterization variable. In practice, this is the arc length at a%point of interest.% a_ - Fourier series coefficients.% Output variables% x_pred - Predicted variable. In practice, this is a fitted or predicted% value of the x- or y- component of a point of interest.% concatenates Fourier series coefficients into a*cos and b*sina0 = a_(1);a = a_(2:2:end);b = a_(3:2:end);% pre-allocation of variablesx_pred = zeros(length(x),1);% evaluates x_predfor i = 1:length(x)for j = 1:length(a)
🔗 参考文献
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🎁 私信完整代码和数据获取及论文数模仿真定制🌈
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN/TCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
















 611
611











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











