






安装ubuntu参考这个视频:
Windows 和 Ubuntu 双系统的安装和卸载_哔哩哔哩_bilibili
ros学习渠道:
注意ubuntu版本可以是20.xx也可以是22.04.x只要支持docker即可
1.安装docker
(1)使用鱼香ros更换下载源:
wget http://fishros.com/install -O fishros && . fishros
选择5(输入)
然后选择1即可
(2)使用上面的链接下载docker:
wget http://fishros.com/install -O fishros && . fishros
选择8
下载完成后使用docker --version 测试是否正常下载
2.下载cyberdog_race压缩包(不用解压)
下载链接:(建议使用校园网下载)
希冀云盘![]() https://pan.educg.net/s/L5myHM3.导入镜像
https://pan.educg.net/s/L5myHM3.导入镜像
在下载目录下打开终端:
输入:
sudo docker load -i cyberdog_raceV2.tar
完成后创建容器:
输入以下代码授权 X Server
xhost +
运行 Docker 镜像:
sudo docker run -it --shm-size="1g" --privileged=true -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix cyberdog_sim:v2
在打开 docker 后,在docker终端运行:
cd /home/cyberdog_sim
python3 src/cyberdog_simulator/cyberdog_gazebo/script/launchsim.py
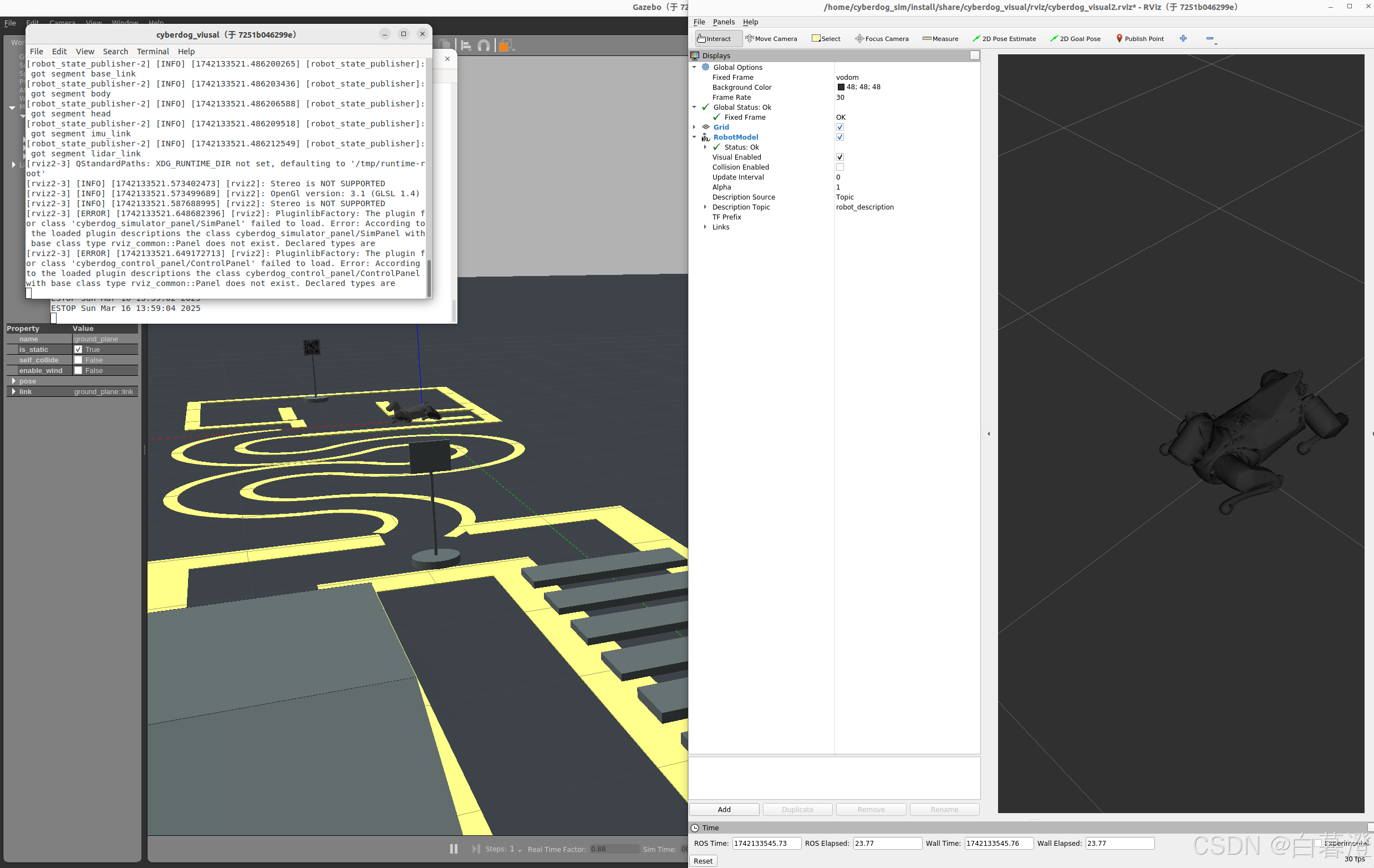
gazebo 界面为仿真器界面,通过该界面可以确认机器人与环境的交互;rviz2 为可视化界面,主要显示机器人自身的状态与传感器返回的数据。
在docker终端中输入exit退出虚拟机
下次要开启docker时,不用再重复创建
打开终端
依次输入以下命令进入刚刚创建的环境
xhost +
sudo docker ps -a

(这里可以看到刚刚创建的环境,复制你的CONTAINER ID,比如我的是7251b046299e)
docker start 7251b046299e(这里改成你的CONTAINER ID)
docker attach 7251b046299e(这里改成你的CONTAINER ID)
这样就再次进入了
4.在vscode部署docker(使用vscode查看和修改docker虚拟机中的代码)
下载vscode(网页打开)
下载完成后在下载目录打开终端
输入以下命令安装:
sudo dpkg -i code_1.98.2-1741788907_amd64.deb注意code_1.98.2-1741788907_amd64.deb是我下载的vscode安装包名,可能下载的名称不一样,记得要改成你下载的安装包名称(右键下载好的文件,点击属性即可复制名称)

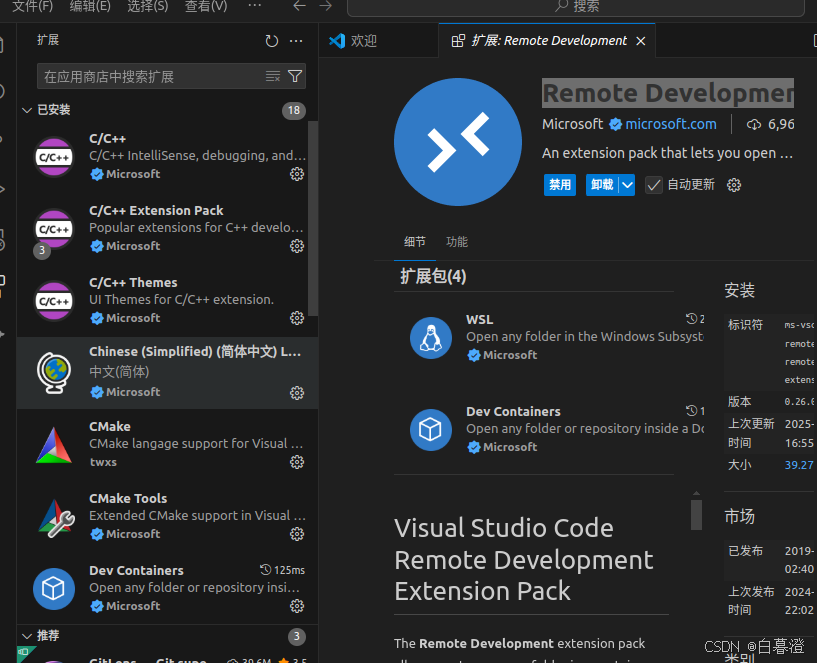
安装好后在vscode中下载以下扩展:
chinese(简体中文)
c/c++
cmake
docker
python
Remote Development
ros
接下来添加docker用户(点击ctrl+alt+t)打开你的终端
docker使用unix socket进行通讯,但是unix socket属于root用户,但是普通用户需要使用sudo才能开启root权限,但是普通的操作并没有root权限。
sudo groupadd docker #添加docker用户组
sudo gpasswd -a $USER docker #将当前用户添加至docker用户组
newgrp docker #更新docker用户组
运行上述命令行后,执行重启操作
reboot
当你有正在运行的docker容器时,这里会有显示(看上一步骤,有启动教程)
变成绿色时,点击展开
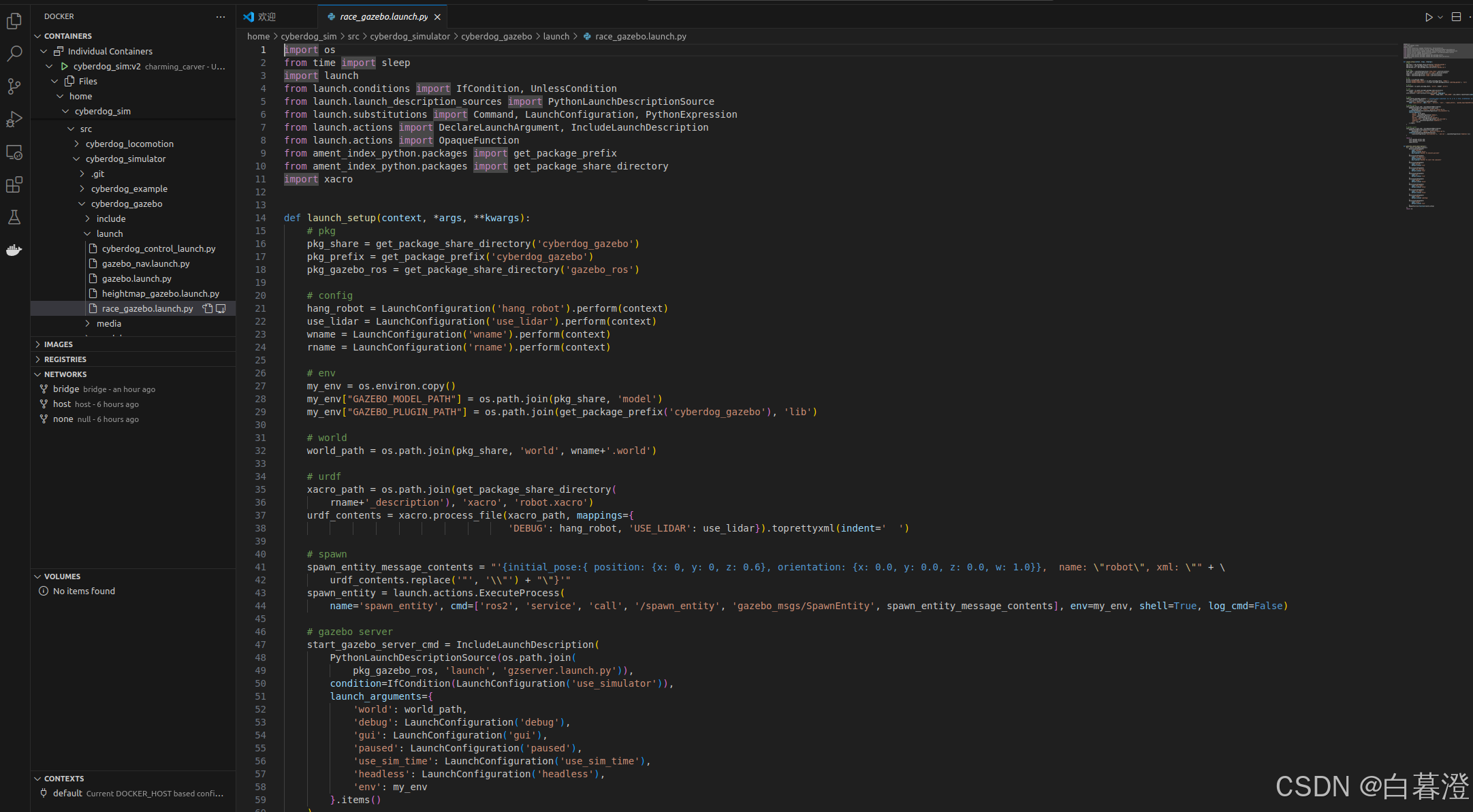
这时我们就可以通过vscode进行编辑了

















 215
215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









