







本文主要介绍了基于无人机贴近摄影测量的多尺度数据融合三维实景模型构建的数据获取、技术路线和具体实施策略,利用无人机多尺度数据融合三维实景建模技术能够获取对象物更多的纹理和结构信息,使对象物结构和纹理更加细致,建模效果更真实准确,可实际应用于桥梁、大坝等重要设施的检测管理和维护工作。

目录
1.概述
无人机倾斜摄影测量技术是利用一组具有一定重叠度的影像数据快速构建纹理清晰的实景三维模型,现已广泛应用于测绘、智慧城市建设等领域。然而基于无人机倾斜摄影测量技术在构建桥梁三维模型过程中,仍存在较多问题,如利用单镜头航摄仪获取影像数据时往往忽略了不同航摄仪倾角对倾斜影像数据获取及三维模型构建的影响、桥底结构混乱纹理模糊等。
贴近摄影测量(nap-of-the-object photogrammetry)是以物体的“面”为摄影对象,通过贴近摄影获取超高分辨率影像,进行精细化地理信息提取。该技术是针对精细化测量需求提出的全新摄影测量技术,它是精细化对地观测需求与旋翼无人机发展结合的必然产物。
针对基于传统无人机倾斜摄影测量的桥梁三维实景建模技术难题,结合贴近摄影测量技术,针对性的提出了多尺度数据融合处理方法,即倾斜航摄数据和贴近摄影测量数据的进行联合处理,构建精细化的桥梁三维实景模型。
2.贴近摄影测量定义
贴近摄影测量(nap-of-the-object photogrammetry)是由武汉大学遥感信息工程学院张祖勋院士于2019年提出。贴近摄影测量被称之为区别于垂直航空摄影测量、倾斜摄影测量的第三种摄影测量方式。贴近摄影测量利用拍摄设备贴近物体表面摄影,获取(亚厘米级)高清影像,并进行摄影测量处理,从而恢复被摄对象的精确坐标和精细形状结构来重建精细三维模型,弥补了其他摄影测量无法达到的精度要求。贴近摄影测量源于滑坡、高位危岩的地质调查与监测预警,并进行了初步应用试验,具有可高度还原地表和物体精细结构的特点,也可用于城市精细重建、古建筑重建、水利工程监测等等方面。
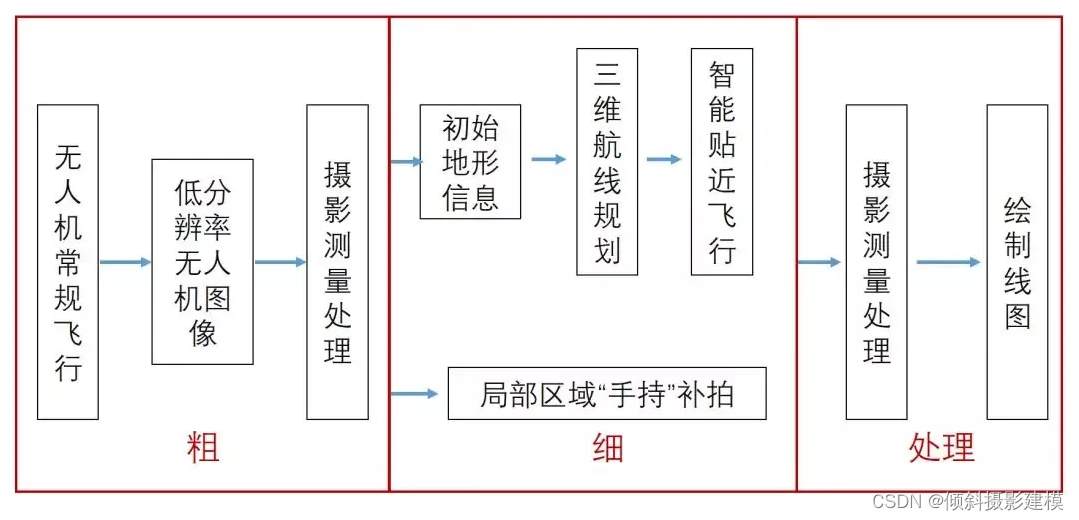
贴近摄影测量技术路线
3.贴近摄影测量数据采集
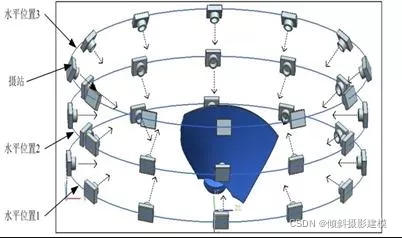
环绕航飞功能属于贴近摄影测量的一种数据采集方式,其可根据指定的摄影分辨率,以一定的距离环绕被测目标飞行,通过多组不同高度的环绕影像组合,实现被测目标表面纹理采集。采用该方法做出的三维模型,分辨率最高可达1cm,能获取桥梁等建筑物更精细的影像纹理,可真实还原建筑物的真实状态,达到保护级的数据成果要求。低空贴近侧面补拍,既可以采用无人机自动贴近飞行,也可以手持相机进行补拍,主要对桥洞及桥墩进行低空侧面航拍,获取桥梁底部结构及纹理。
01
保证采集对象分辨率优于1公分,对应相连续的相片保证优于80%的重叠率。
02
环绕拍摄及侧面补拍,保证对象无视觉死角。实时地进行相片的质量检查,对于不符合要求的产品如绝对漏洞、相对漏洞及其它严重缺陷必须及时补摄。
03
保证相片色调亮度均匀,不可出现曝光过度或曝光不足等情况。
04
利用空地融合的方式结合空三平查。保证模型贴图纹理颜色一致性。
05
精细化模型应融入与整体三维大场景中,并能流畅浏览。
4.多尺度、多视角的影像密集匹配技术
针对模型构建不完整或不清晰的重点地物,采用多尺度航摄技术,实现多尺度、多视角的影像融合和模型重建。解算外方位元素时,仍运用多视角联合平差法,获取多尺度影像的同名像点,并引入控制点和连接点加速空三匹配。
5.贴近摄影测量特点
01
贴近摄影测量不仅仅是计算机视觉、摄影测量的一个策略,也是社会发展的重要方向,是时代发展的必然。因为人们期望能对object的各个面都能获取厘米甚至毫米级别影像进行量测。
02
贴近摄影测量是旋翼无人机应用于近景摄影测量,从而形成的一种全新摄影测量方式,可为古建筑、水利、滑坡、三维建模等物体的数字化重建提供一种有效的补充手段。
03
贴近摄影测量与倾斜摄影测量相比,能获取更多的细节纹理和结构信息,模型成果更精细,精度更高。

 桥梁的倾斜摄影测量与贴近摄影测量建模效果
桥梁的倾斜摄影测量与贴近摄影测量建模效果
6.应用展望
基于三维实景精细化模型,桥梁、大坝等重要设施的管理部门可以利用裂缝提取软件进行裂缝的自动提取以及其他缺陷的量化计算,并对裂缝宽度、长度、位置信息进行汇总,最终出具检测报告。相对于传统的检测方式,不仅从检测成本、检测效率上有着明显的提升,同时保证了检测人员的作业安全。
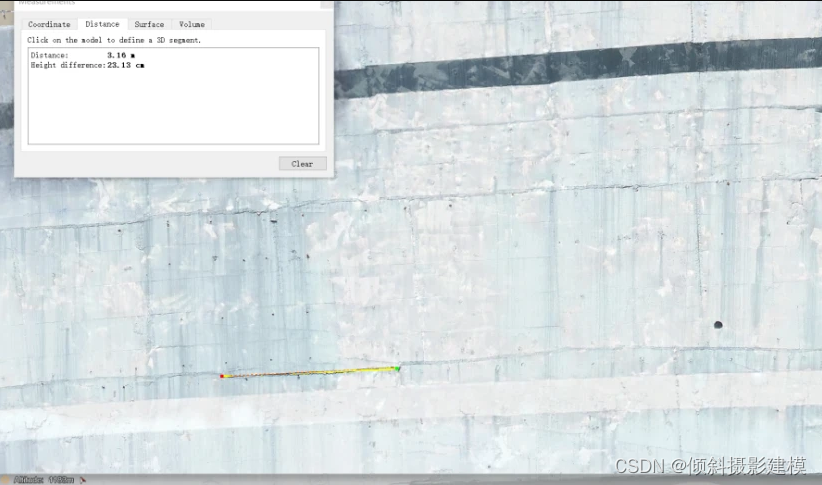
大桥侧面病害量测
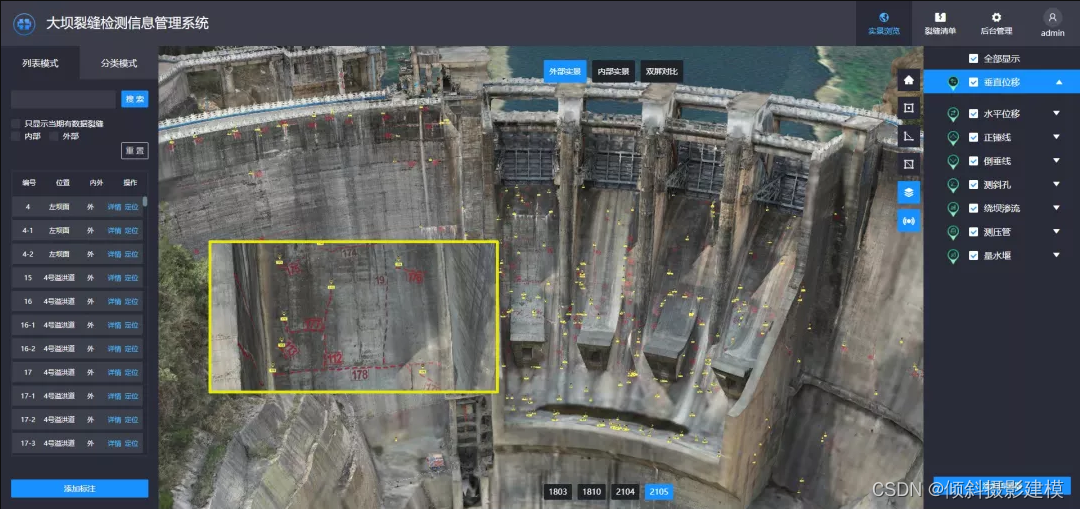
精细化三维实景模型用于大坝裂缝监测

















 640
640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









