










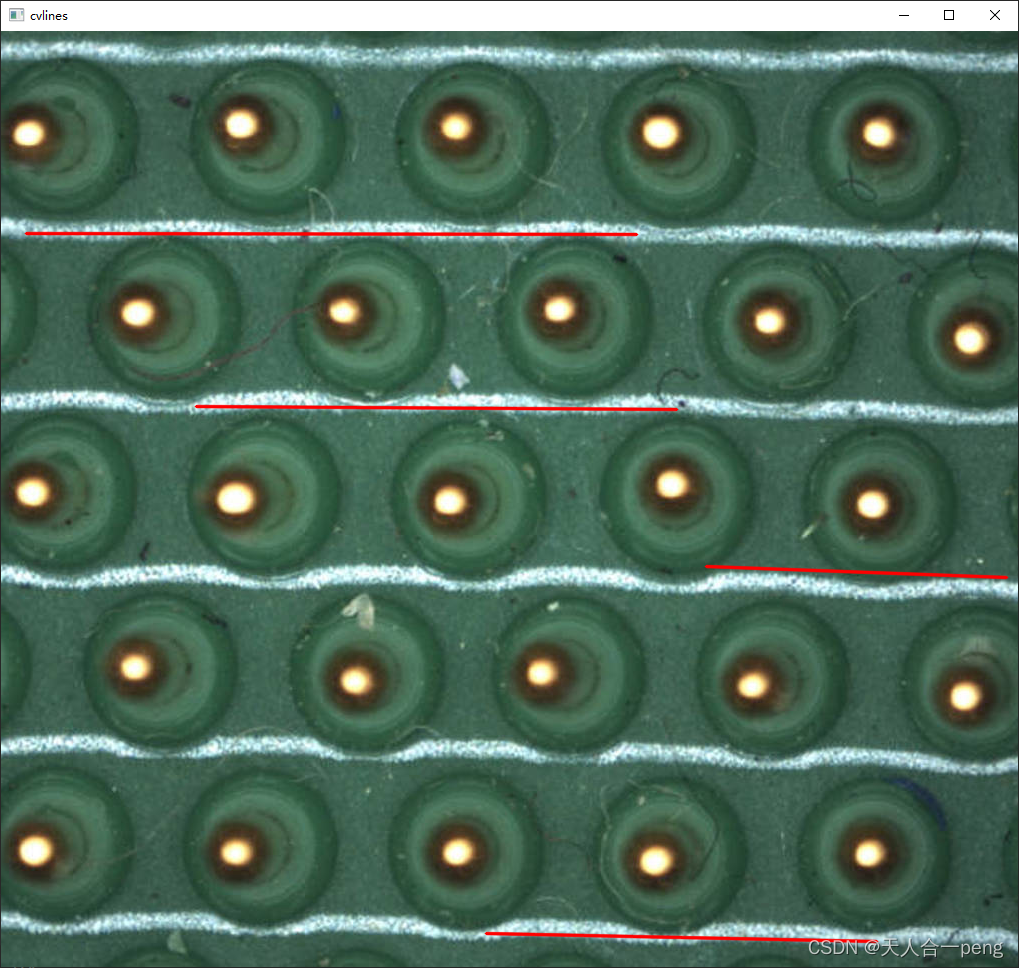
检测结果

找白色的线
线可以通过长度调节
# coding:utf-8
import math
import cv2
import numpy as np
def findNeedlePoints(img):
gray_src= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
minThreshValue = 200
_, gray = cv2.threshold(gray_src, minThreshValue, 255, cv2.THRESH_BINARY)
erosion_size = 3
# element = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (2 * erosion_size + 1, 2 * erosion_size + 1),
# (erosion_size, erosion_size))
element = cv2.getStructuringElement(cv2.MORPH_ERODE, (2 * erosion_size + 1, 2 * erosion_size + 1),
(erosion_size, erosion_size))
#MORPH_ELLIPSE 不同的测试一下
erosion_gray = cv2.erode(gray, element, 3)
cv2.imshow("erosion_gray", erosion_gray)
paramsIn = cv2.SimpleBlobDetector_Params()
paramsIn.filterByArea = True
# 不同图片应该调节的参数
paramsIn.minArea = 200
paramsIn.maxArea = 1000
paramsIn.minDistBetweenBlobs = 90
paramsIn.filterByColor = True
paramsIn.filterByConvexity = False
paramsIn.minThreshold = 100*2
paramsIn.maxThreshold = 1000
# 图像取反
needleGray = 255 - erosion_gray.copy()
# 中值滤波和腐蚀去噪
needleGray = cv2.medianBlur(needleGray, 3)
# cv2.imshow('needleGray', needleGray)
erosion_size = 2
element = cv2.getStructuringElement(cv2.MORPH_RECT, (2 * erosion_size + 1, 2 * erosion_size + 1),
(erosion_size, erosion_size))
needlePoints = cv2.erode(needleGray, element, 1)
cv2.imshow('needle=Points', needlePoints)
detector2 = cv2.SimpleBlobDetector_create(paramsIn)
needleKeypoints = detector2.detect(needlePoints)
# opencv
needle_keypoints = cv2.drawKeypoints(needlePoints, needleKeypoints, np.array([]), (255, 0, 0),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
allNeedlePoints = []
if needleKeypoints is not None:
for i in range(len(needleKeypoints)):
allNeedlePoints.append(needleKeypoints[i].pt)
color_img = cv2.cvtColor(needle_keypoints, cv2.COLOR_BGR2RGB)
# needle_img = cv2.cvtColor(im_with_keypoints, cv2.COLOR_BGR2RGB)
cv2.imshow('holeShow', color_img)
# cv2.imshow('needleShow', needle_img)
cv2.waitKey()
def findWhiteLines(img):
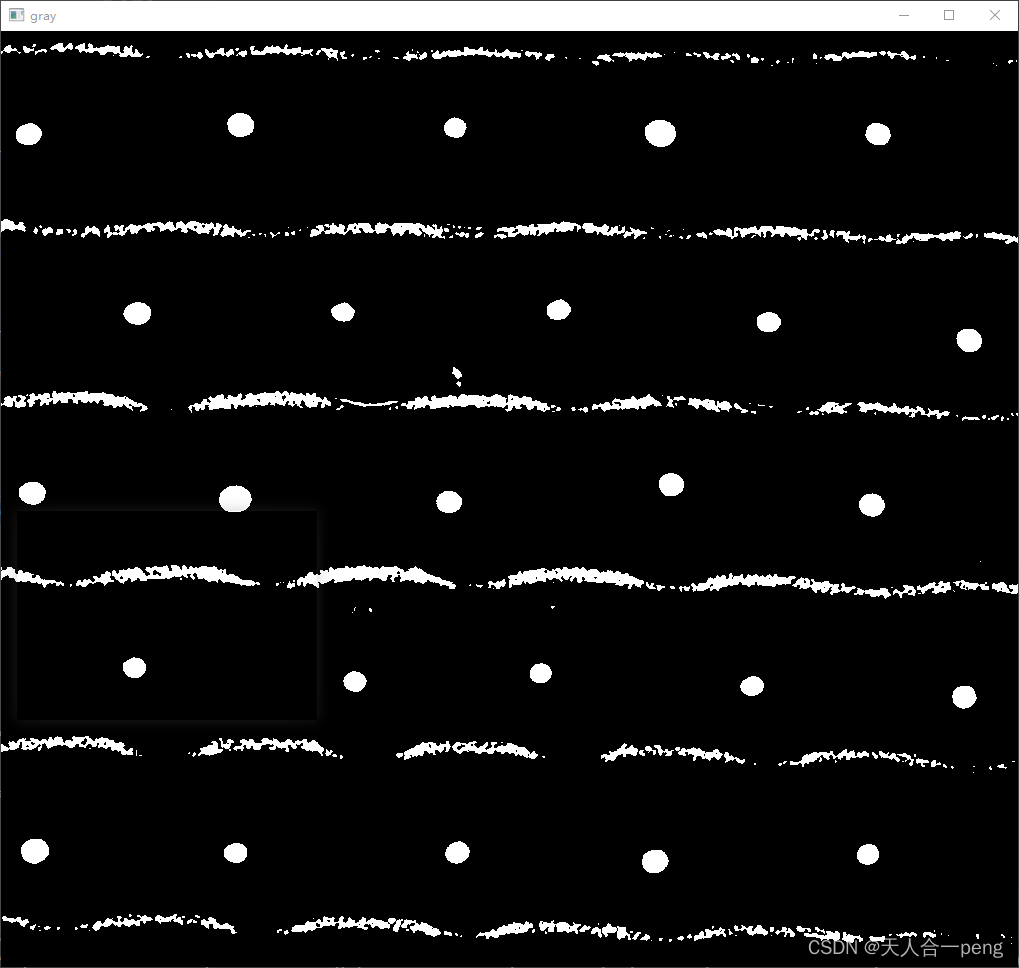
minThreshValue = 200
gray_src= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
_, gray = cv2.threshold(gray_src, minThreshValue, 255, cv2.THRESH_BINARY)
cv2.imshow("gray", gray)
# erosion_size = 3
# element = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (2 * erosion_size + 1, 2 * erosion_size + 1),
# (erosion_size, erosion_size))
# erosion_dst = cv2.erode(gray, element, 3)
# cv2.imshow("erosion", erosion_dst)
lsd = cv2.createLineSegmentDetector(2, 0.1)
dlines = lsd.detect(gray)
if dlines is not None:
for dline in dlines[0]:
x0 = int(round(dline[0][0]))
y0 = int(round(dline[0][1]))
x1 = int(round(dline[0][2]))
y1 = int(round(dline[0][3]))
if np.linalg.norm(np.array([x0, y0]) - np.array([x1, y1])) > 300:
cv2.line(img, (x0, y0), (x1, y1), (0, 0, 255), 2, cv2.LINE_AA)
cv2.imshow("cvlines", img)
cv2.waitKey()
if __name__ == "__main__":
# # 单张图片测试
img = cv2.imread("images/CircleLinker/CLinker10.jpg",1)
# img = cv2.imread("images/Snap_0.jpg",1)
# img = cv2.imread("images/Holes/Hole2.jpg",1)
if img is not None:
findNeedlePoints(img)
# mainFigure(img)
findWhiteLines(img)
else:
print("no image")
# # # 所有图片测试
# for i in range(5):
# fileName = "Zhen" + str(i+1) + ".jpg"
# # img = cv2.imread("circles/Snap_007.jpg",1)
# img = cv2.imread("images/ZhenJiao/" + fileName,1)
# print(fileName)
# mainFigure(img)














 210
210











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









