






背景
开发过程中,嵌入式linux设备需要同步时间至GPS时间域,同时也要通过gptp同步至外部ECU的时间域。
采用开源的gptp协议栈,会将系统时间修改(时钟源为CLOCK_REALTIME)
所以内部同步到GPS的时间线不能与之重叠。
思路
- CLOCK_REALTIME用于对外的时间同步
- 需要新建一条时间线用于内的gps同步
- Linux有以下几个时钟源,CLOCK_MONOTONIC是从启动开始计数且不受用户改变,适合用于该场景
a、CLOCK_REALTIME:系统实时时间,随系统实时时间改变而改变
b、CLOCK_MONOTONIC,从系统启动这一刻起开始计时,不受系统时间被用户改变的影响
c、CLOCK_PROCESS_CPUTIME_ID,本进程到当前代码系统CPU花费的时间
d、CLOCK_THREAD_CPUTIME_ID,本线程到当前代码系统CPU花费的时间 - CLOCK_MONOTONIC时钟源是一直累加,不受外界影响,当时间同步开始时,将同步时间减去当前CLOCK_MONOTONIC,得到的差值为修正时间,每当我们需要获取同步后的时间时,只需将最新的修正时间加上当前最新的CLOCK_MONOTONIC即为实时的时间同步后的时间
同步策略
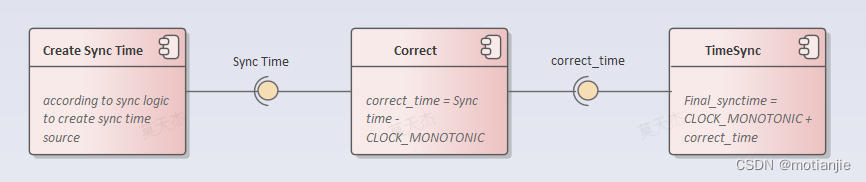
- 由内部时间同步逻辑得到一个同步事件源Sync Time
- 传递到Correct模块进行时间偏差计算,时间correct_time=Sync Time-当前CLOCK_MONOTONIC
- 计算出correct_time后立即传递至TimeSync模块,修正TimeSync中的correct_time,由于TimeSync提供对外的时间获取接口,所以当外界需要获取时间同步后的时间,则实时计算并提供Final_synctime
- Final_synctime=CLOCK_MONOTONIC+correct_time
- 这时候,设备内部即支持获取通过gptp同步的外部同步时间,也支持获取通过内部gps时间同步时间















 1951
1951











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









