







- 前言
- 实现方案
前言
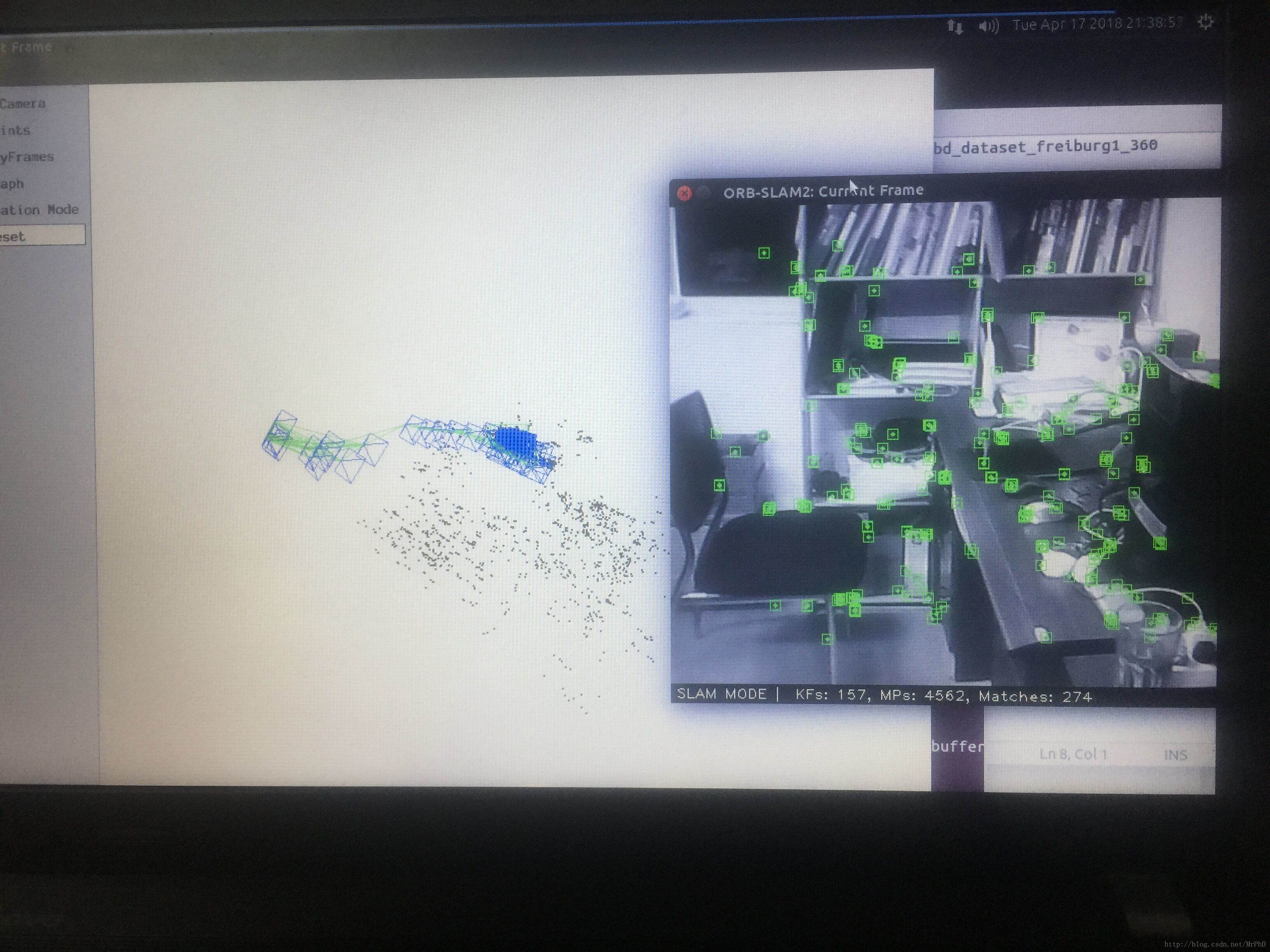
我大概真的真的好久没写博客,最近实在太忙了。今天晚上终于实现了在ubuntu 14.04 + ROS indigo环境下,基于ORB_SLAM2开源代码的单目实时定位,踩了很多坑,查了很多资料,将一些心得和解决方案分享给大家。
实现方案
实现单目定位过程中,我最大的感触是——磨刀不误砍柴工。为什么这么说?我打算直接按照网上的方法去实现定位,尤其我要在ROS下实现的时候,只是依葫芦画瓢,ROS的知识一点没有看,对在terminal敲的代码也一知半解。我极力推荐没有ROS基础的童鞋先了解一下ROS,推荐资料主要是ROS wiki和《ROS机器人编程》一书,书应该在网上可以找到pdf。我大概花了一个早上看了一百多页,对整个ROS有了新的认识,后面在实现实时定位的时候事半功倍。SLAM具体原理和技术细节,在此篇博文中不会展开,如有条件,我会在之后的博文展开一些细节。下面我会开始叙述整个实现过程,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 251
251











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









