







1. 环境准备
进入案例官网, 本体验的所有代码都来自mindspore官网:
MindSpore![]() https://www.mindspore.cn/tutorials/application/zh-CN/r2.1/generative/diffusion.html点击”在ModelArts平台运行“
https://www.mindspore.cn/tutorials/application/zh-CN/r2.1/generative/diffusion.html点击”在ModelArts平台运行“

进入modelArts平台
免费的CPU 2核4GB

有多种选择:
2. Diffusion扩散模型介绍
本文对Diffusion扩散模型的理解是基于DDPM, 而DDPM已经在(无)条件图像/音频/视频生成领域取得了较多显著的成果,现有的比较受欢迎的的例子包括由OpenAI主导的GLIDE和DALL-E 2、由海德堡大学主导的潜在扩散和由Google Brain主导的图像生成。
将Diffusion与其他生成模型(如Normalizing Flows、GAN或VAE)进行比较,它们都将噪声从一些简单分布转换为数据样本,Diffusion也是从纯噪声开始通过一个神经网络学习逐步去噪,最终得到一个实际图像。 Diffusion基于马尔科夫链, 对于图像的处理包括以下两个过程:
正向扩散过程 q:它逐渐将高斯噪声添加到图像中,直到最终得到纯噪声
反向去噪的扩散过程 pθ:通过训练神经网络从纯噪声开始逐渐对图像去噪,直到最终得到一个实际的图像
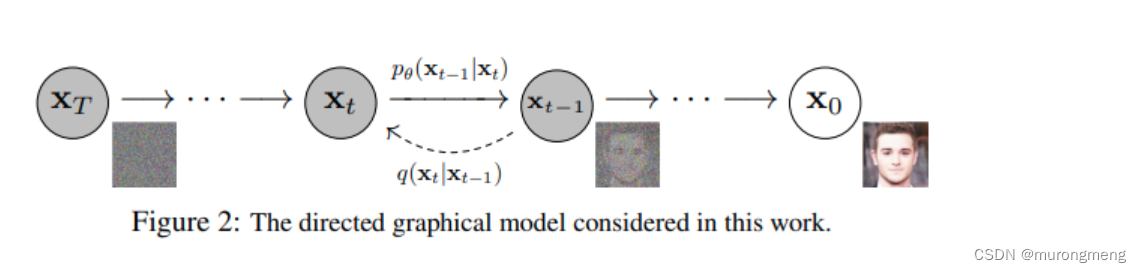
如图所示:X0-Xt的过程是Diffusion的前向过程, 每一步的随机过程为: , Xt-X0的过程为Diffusion的逆向过程,每一步的随机过程为:
, Xt-X0的过程为Diffusion的逆向过程,每一步的随机过程为:
Diffusion 前向过程
Diffusion 前向过程就是图片加噪声的过程, 也叫做马尔科夫过程:

Diffusion 逆向过程
Diffusion 逆向过程是去噪过程,通过神经网络学习并表示 pθ(xt−1|xt) 的过程就是Diffusion 逆向去噪的核心,公式是:

3. 体验实验
实验开始之前请确保安装并导入所需的库(假设您已经安装了MindSpore、download、dataset、matplotlib以及tqdm)
不过此次体验用的是官网modelarts直接用mindspore_diffusion.ipynb运行,不需要再次安装
点击左上角的运行即可
构建Diffusion模型
定义了一些帮助函数和类,这些函数和类将在实现神经网络时使用。
def rearrange(head, inputs):
b, hc, x, y = inputs.shape
c = hc // head
return inputs.reshape((b, head, c, x * y))
def rsqrt(x):
res = ops.sqrt(x)
return ops.inv(res)
def randn_like(x, dtype=None):
if dtype is None:
dtype = x.dtype
res = ops.standard_normal(x.shape).astype(dtype)
return res
def randn(shape, dtype=None):
if dtype is None:
dtype = ms.float32
res = ops.standard_normal(shape).astype(dtype)
return res
def randint(low, high, size, dtype=ms.int32):
res = ops.uniform(size, Tensor(low, dtype), Tensor(high, dtype), dtype=dtype)
return res
def exists(x):
return x is not None
def default(val, d):
if exists(val):
return val
return d() if callable(d) else d
def _check_dtype(d1, d2):
if ms.float32 in (d1, d2):
return ms.float32
if d1 == d2:
return d1
raise ValueError('dtype is not supported.')
class Residual(nn.Cell):
def __init__(self, fn):
super().__init__()
self.fn = fn
def construct(self, x, *args, **kwargs):
return self.fn(x, *args, **kwargs) + x
上采样和下采样操作的别名
位置向量
SinusoidalPositionEmbeddings模块采用(batch_size, 1)形状的张量作为输入(即批处理中几个有噪声图像的噪声水平),并将其转换为(batch_size, dim)形状的张量,其中dim是位置嵌入的尺寸。然后,我们将其添加到每个剩余块中。

ResNet/ConvNeXT块
因为Phil Wang决定添加ConvNeXT替换ResNet,在图像领域取得巨大成功, 因此本文选择ConvNeXT块构建U-Net模型
class Block(nn.Cell):
def __init__(self, dim, dim_out, groups=1):
super().__init__()
self.proj = nn.Conv2d(dim, dim_out, 3, pad_mode="pad", padding=1)
self.proj = c(dim, dim_out, 3, padding=1, pad_mode='pad')
self.norm = nn.GroupNorm(groups, dim_out)
self.act = nn.SiLU()
def construct(self, x, scale_shift=None):
x = self.proj(x)
x = self.norm(x)
if exists(scale_shift):
scale, shift = scale_shift
x = x * (scale + 1) + shift
x = self.act(x)
return x
class ConvNextBlock(nn.Cell):
def __init__(self, dim, dim_out, *, time_emb_dim=None, mult=2, norm=True):
super().__init__()
self.mlp = (
nn.SequentialCell(nn.GELU(), nn.Dense(time_emb_dim, dim))
if exists(time_emb_dim)
else None
)
self.ds_conv = nn.Conv2d(dim, dim, 7, padding=3, group=dim, pad_mode="pad")
self.net = nn.SequentialCell(
nn.GroupNorm(1, dim) if norm else nn.Identity(),
nn.Conv2d(dim, dim_out * mult, 3, padding=1, pad_mode="pad"),
nn.GELU(),
nn.GroupNorm(1, dim_out * mult),
nn.Conv2d(dim_out * mult, dim_out, 3, padding=1, pad_mode="pad"),
)
self.res_conv = nn.Conv2d(dim, dim_out, 1) if dim != dim_out else nn.Identity()
def construct(self, x, time_emb=None):
h = self.ds_conv(x)
if exists(self.mlp) and exists(time_emb):
assert exists(time_emb), "time embedding must be passed in"
condition = self.mlp(time_emb)
condition = condition.expand_dims(-1).expand_dims(-1)
h = h + condition
h = self.net(h)
return h + self.res_conv(x)
Attention模块
定义SiLU模块,DDPM作者将其添加到卷积块之间。SiLU是著名的Transformer架构,在人工智能的各个领域都取得了巨大的成功,从NLP到蛋白质折叠。
class Attention(nn.Cell):
def __init__(self, dim, heads=4, dim_head=32):
super().__init__()
self.scale = dim_head ** -0.5
self.heads = heads
hidden_dim = dim_head * heads
self.to_qkv = nn.Conv2d(dim, hidden_dim * 3, 1, pad_mode='valid', has_bias=False)
self.to_out = nn.Conv2d(hidden_dim, dim, 1, pad_mode='valid', has_bias=True)
self.map = ops.Map()
self.partial = ops.Partial()
def construct(self, x):
b, _, h, w = x.shape
qkv = self.to_qkv(x).chunk(3, 1)
q, k, v = self.map(self.partial(rearrange, self.heads), qkv)
q = q * self.scale
# 'b h d i, b h d j -> b h i j'
sim = ops.bmm(q.swapaxes(2, 3), k)
attn = ops.softmax(sim, axis=-1)
# 'b h i j, b h d j -> b h i d'
out = ops.bmm(attn, v.swapaxes(2, 3))
out = out.swapaxes(-1, -2).reshape((b, -1, h, w))
return self.to_out(out)
class LayerNorm(nn.Cell):
def __init__(self, dim):
super().__init__()
self.g = Parameter(initializer('ones', (1, dim, 1, 1)), name='g')
def construct(self, x):
eps = 1e-5
var = x.var(1, keepdims=True)
mean = x.mean(1, keep_dims=True)
return (x - mean) * rsqrt((var + eps)) * self.g
class LinearAttention(nn.Cell):
def __init__(self, dim, heads=4, dim_head=32):
super().__init__()
self.scale = dim_head ** -0.5
self.heads = heads
hidden_dim = dim_head * heads
self.to_qkv = nn.Conv2d(dim, hidden_dim * 3, 1, pad_mode='valid', has_bias=False)
self.to_out = nn.SequentialCell(
nn.Conv2d(hidden_dim, dim, 1, pad_mode='valid', has_bias=True),
LayerNorm(dim)
)
self.map = ops.Map()
self.partial = ops.Partial()
def construct(self, x):
b, _, h, w = x.shape
qkv = self.to_qkv(x).chunk(3, 1)
q, k, v = self.map(self.partial(rearrange, self.heads), qkv)
q = ops.softmax(q, -2)
k = ops.softmax(k, -1)
q = q * self.scale
v = v / (h * w)
# 'b h d n, b h e n -> b h d e'
context = ops.bmm(k, v.swapaxes(2, 3))
# 'b h d e, b h d n -> b h e n'
out = ops.bmm(context.swapaxes(2, 3), q)
out = out.reshape((b, -1, h, w))
return self.to_out(out)
组归一化
下面,我们定义一个PreNorm类,将用于在注意层之前应用groupnorm。
条件U-Net
上面定义了所有的构建块(位置嵌入、ResNet/ConvNeXT块、Attention和组归一化),下面开始定义整个神经网络
网络构建过程如下:
- 将卷积层应用于噪声图像批上,并计算噪声水平的位置
- 应用一系列下采样级。每个下采样阶段由2个ResNet/ConvNeXT块 + groupnorm + attention + 残差连接 + 一个下采样操作组成
- 在网络的中间,再次应用ResNet或ConvNeXT块,并与attention交织
- 应用一系列上采样级。每个上采样级由2个ResNet/ConvNeXT块+ groupnorm + attention + 残差连接 + 一个上采样操作组成
- 应用ResNet/ConvNeXT块,然后应用卷积层
class Unet(nn.Cell):
def __init__(
self,
dim,
init_dim=None,
out_dim=None,
dim_mults=(1, 2, 4, 8),
channels=3,
with_time_emb=True,
convnext_mult=2,
):
super().__init__()
self.channels = channels
init_dim = default(init_dim, dim // 3 * 2)
self.init_conv = nn.Conv2d(channels, init_dim, 7, padding=3, pad_mode="pad", has_bias=True)
dims = [init_dim, *map(lambda m: dim * m, dim_mults)]
in_out = list(zip(dims[:-1], dims[1:]))
block_klass = partial(ConvNextBlock, mult=convnext_mult)
if with_time_emb:
time_dim = dim * 4
self.time_mlp = nn.SequentialCell(
SinusoidalPositionEmbeddings(dim),
nn.Dense(dim, time_dim),
nn.GELU(),
nn.Dense(time_dim, time_dim),
)
else:
time_dim = None
self.time_mlp = None
self.downs = nn.CellList([])
self.ups = nn.CellList([])
num_resolutions = len(in_out)
for ind, (dim_in, dim_out) in enumerate(in_out):
is_last = ind >= (num_resolutions - 1)
self.downs.append(
nn.CellList(
[
block_klass(dim_in, dim_out, time_emb_dim=time_dim),
block_klass(dim_out, dim_out, time_emb_dim=time_dim),
Residual(PreNorm(dim_out, LinearAttention(dim_out))),
Downsample(dim_out) if not is_last else nn.Identity(),
]
)
)
mid_dim = dims[-1]
self.mid_block1 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
self.mid_attn = Residual(PreNorm(mid_dim, Attention(mid_dim)))
self.mid_block2 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
for ind, (dim_in, dim_out) in enumerate(reversed(in_out[1:])):
is_last = ind >= (num_resolutions - 1)
self.ups.append(
nn.CellList(
[
block_klass(dim_out * 2, dim_in, time_emb_dim=time_dim),
block_klass(dim_in, dim_in, time_emb_dim=time_dim),
Residual(PreNorm(dim_in, LinearAttention(dim_in))),
Upsample(dim_in) if not is_last else nn.Identity(),
]
)
)
out_dim = default(out_dim, channels)
self.final_conv = nn.SequentialCell(
block_klass(dim, dim), nn.Conv2d(dim, out_dim, 1)
)
def construct(self, x, time):
x = self.init_conv(x)
t = self.time_mlp(time) if exists(self.time_mlp) else None
h = []
for block1, block2, attn, downsample in self.downs:
x = block1(x, t)
x = block2(x, t)
x = attn(x)
h.append(x)
x = downsample(x)
x = self.mid_block1(x, t)
x = self.mid_attn(x)
x = self.mid_block2(x, t)
len_h = len(h) - 1
for block1, block2, attn, upsample in self.ups:
x = ops.concat((x, h[len_h]), 1)
len_h -= 1
x = block1(x, t)
x = block2(x, t)
x = attn(x)
x = upsample(x)
return self.final_conv(x)
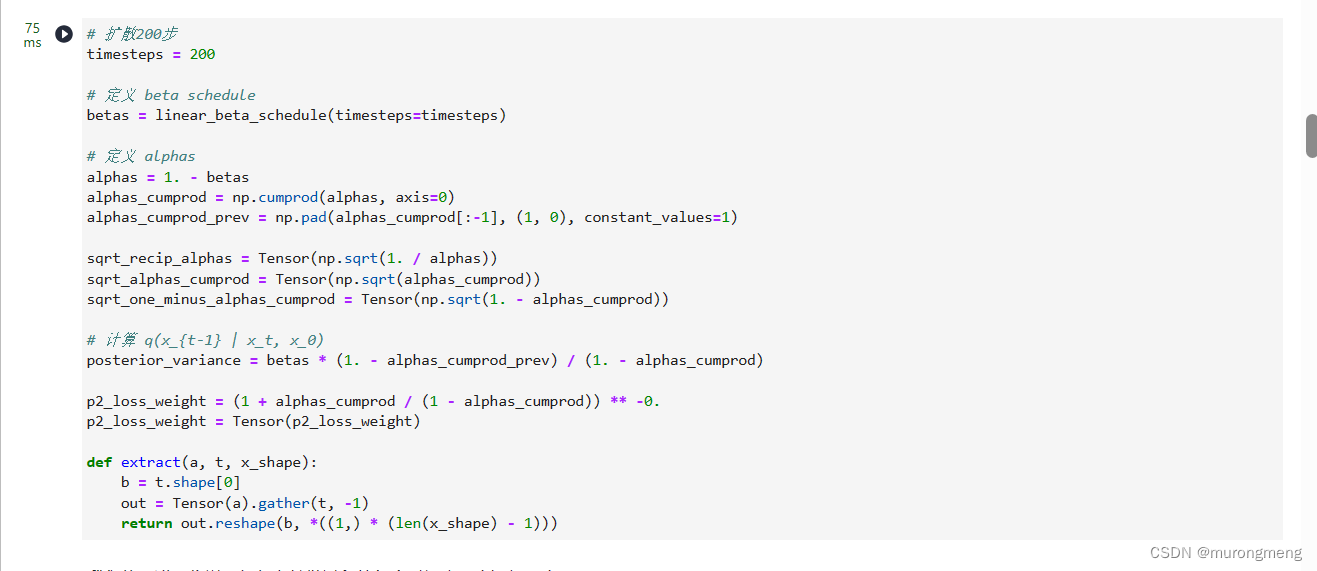
正向扩散
定义T时间步的时间表:

使用T=200时间步长的线性计划
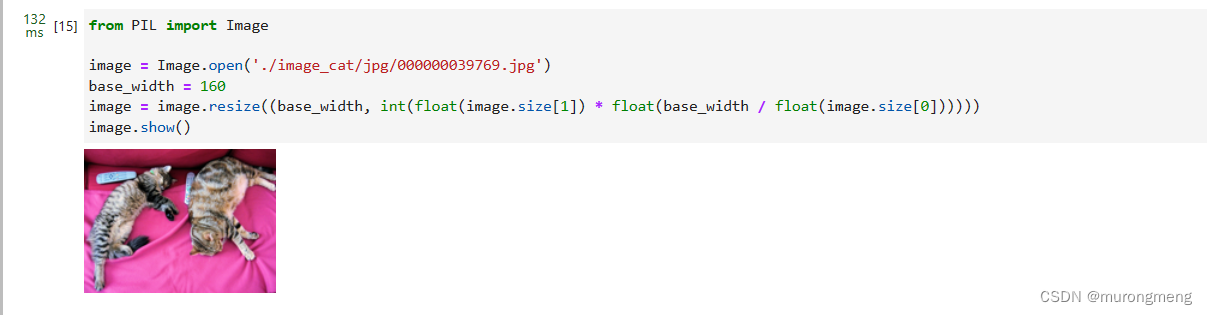
数据的话,使用的是猫图像来说明如何在扩散过程的每个时间步骤中添加噪音
# 下载猫猫图像
url = 'https://mindspore-website.obs.cn-north-4.myhuaweicloud.com/notebook/datasets/image_cat.zip'
path = download(url, './', kind="zip", replace=True)

from PIL import Image
image = Image.open('./image_cat/jpg/000000039769.jpg')
base_width = 160
image = image.resize((base_width, int(float(image.size[1]) * float(base_width / float(image.size[0])))))
image.show()
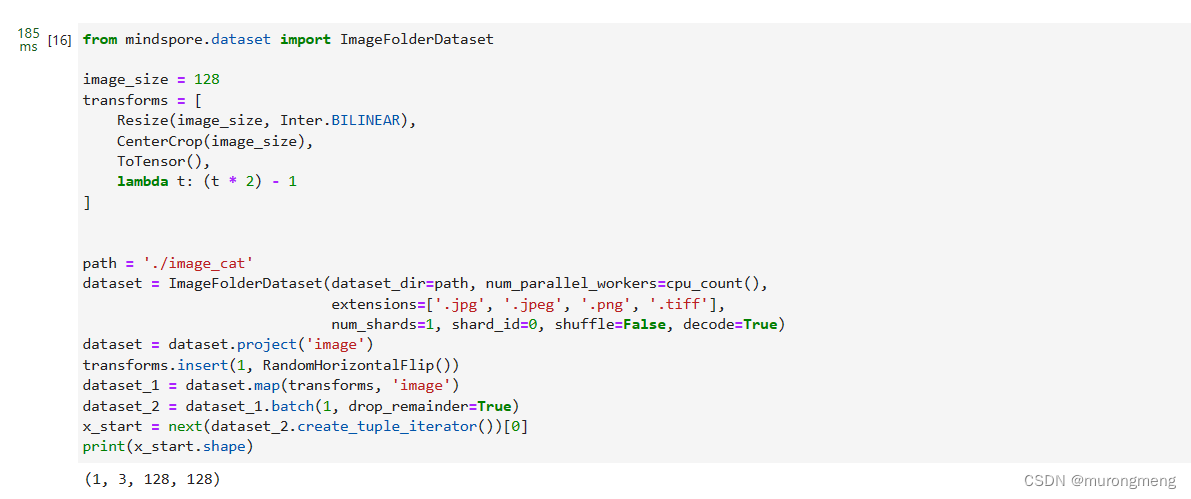
噪声被添加到mindspore张量中,而不是Pillow图像。我们将首先定义图像转换,允许我们从PIL图像转换到mindspore张量(我们可以在其上添加噪声),反之亦然。
这些转换相当简单:我们首先通过除以255来标准化图像(使它们在 [0,1]范围内),然后确保它们在 [−1,1]范围内。
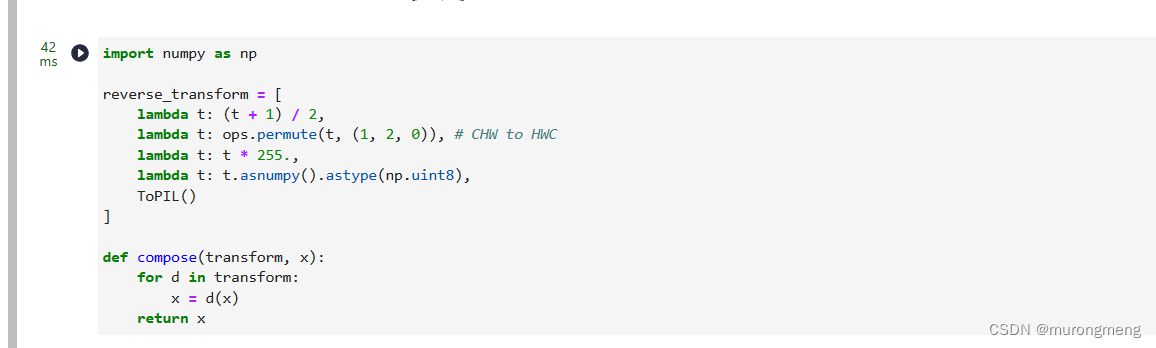
定义了反向变换,它接收一个包含 [−1,1]中的张量,并将它们转回 PIL 图像:
验证结果:
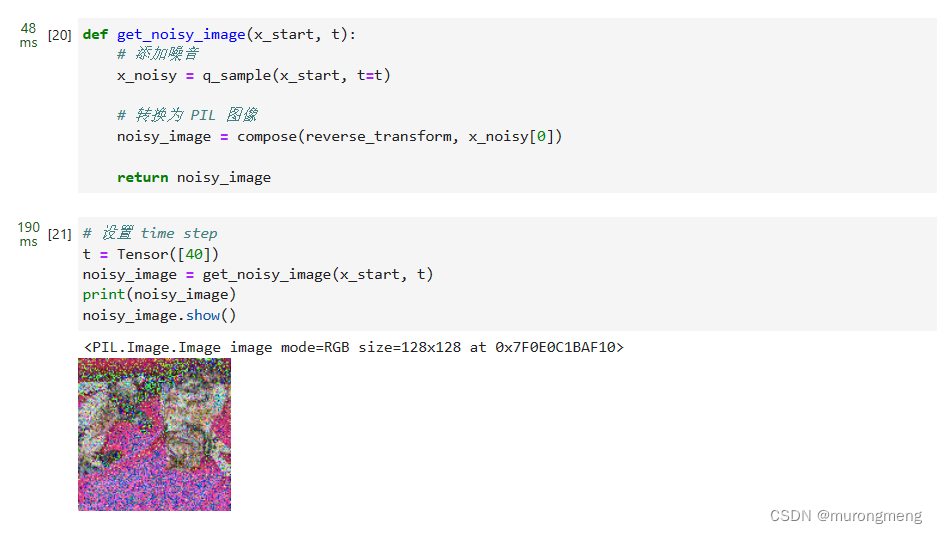
定义前向扩散过程:

在特定的步长上测试它,下面是可视化结果:
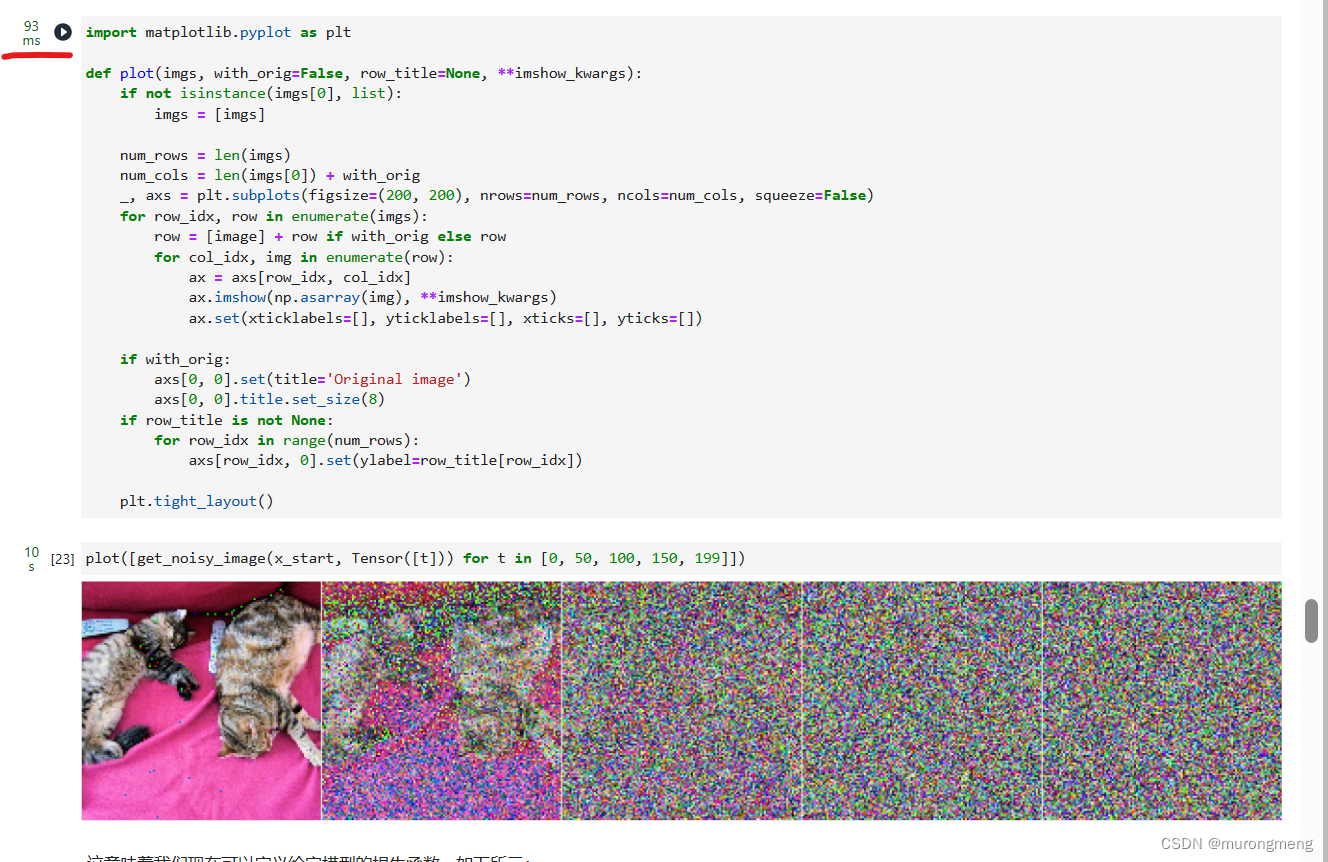
不同的时间步骤可视化此情况
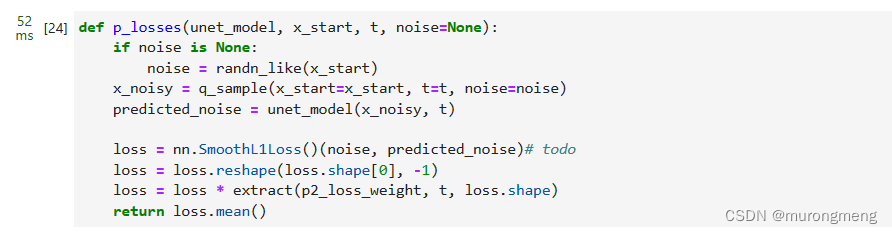
定义给定模型的损失函数,denoise_model将是我们上面定义的U-Net。我们将在真实噪声和预测噪声之间使用Huber损失
数据准备与处理
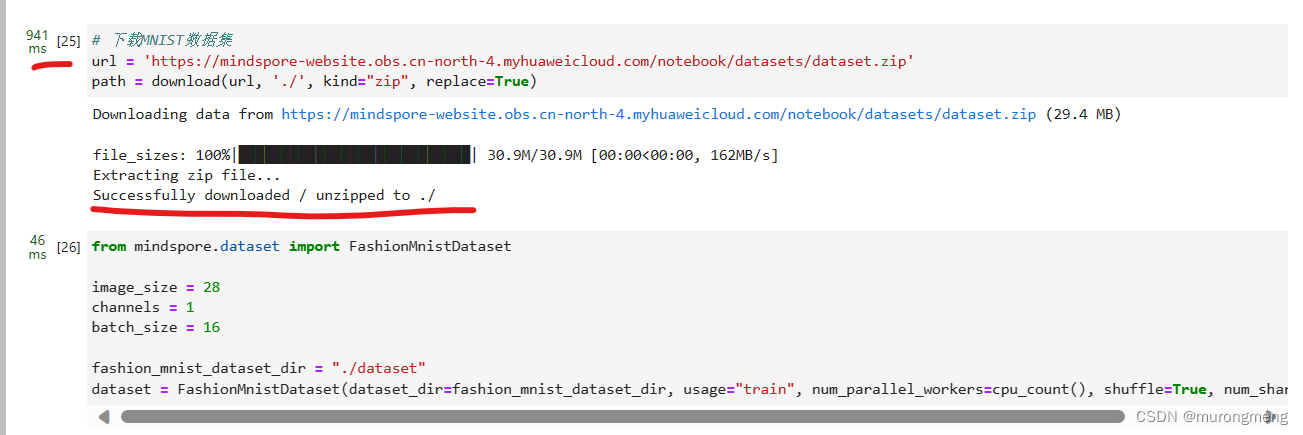
下载并解压Fashion_MNIST数据集到指定路径,此数据集由已经具有相同分辨率的图像组成,即28x28
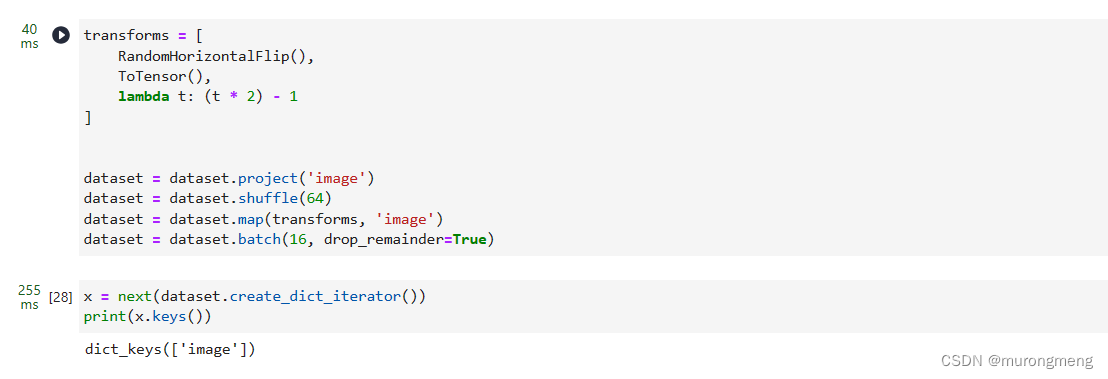
定义一个transform操作,将在整个数据集上动态应用该操作。该操作应用一些基本的图像预处理:随机水平翻转、重新调整,最后使它们的值在 [−1,1][−1,1] 范围内。
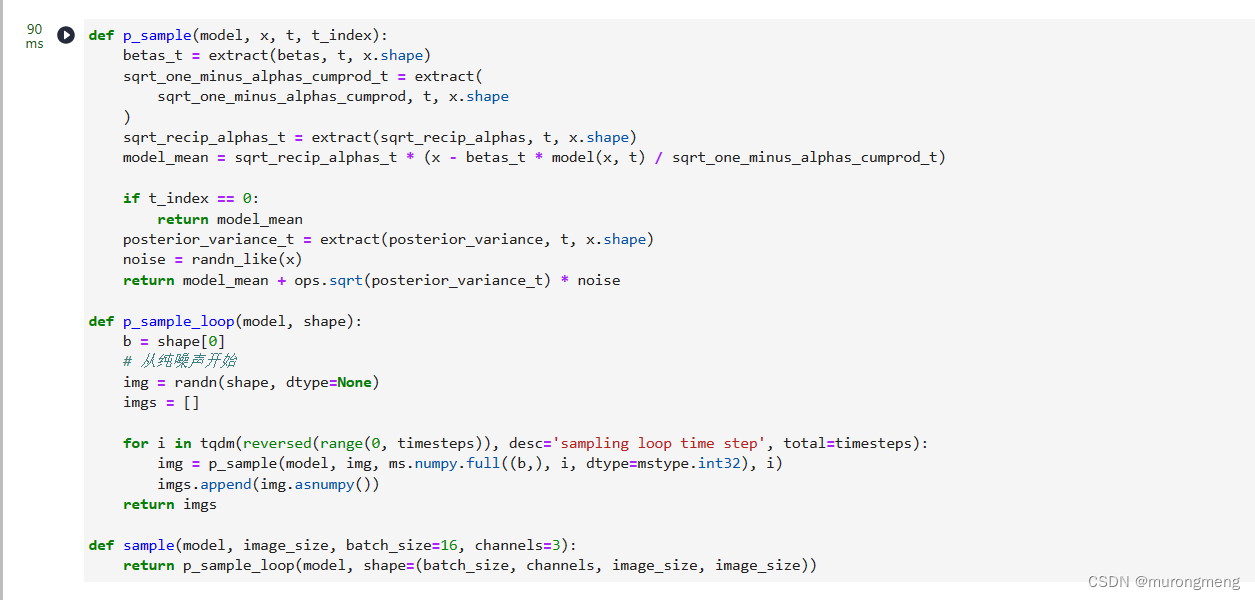
采样
采样算法:
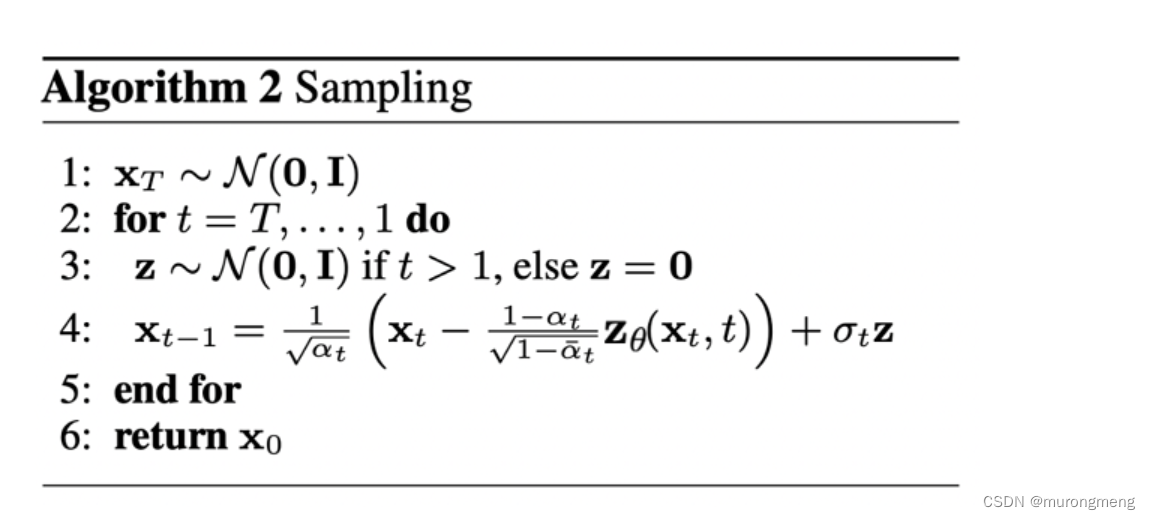
理想情况下,我们最终会得到一个看起来像是来自真实数据分布的图像
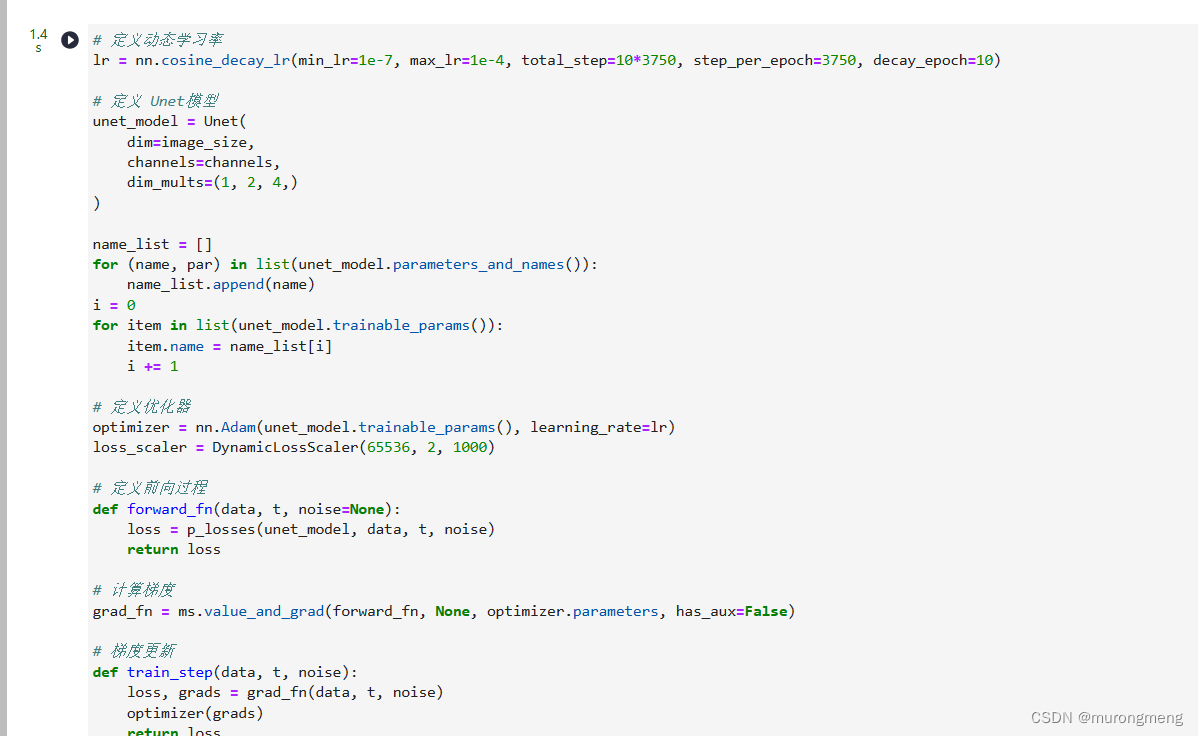
训练过程
# 定义动态学习率
lr = nn.cosine_decay_lr(min_lr=1e-7, max_lr=1e-4, total_step=10*3750, step_per_epoch=3750, decay_epoch=10)
# 定义 Unet模型
unet_model = Unet(
dim=image_size,
channels=channels,
dim_mults=(1, 2, 4,)
)
name_list = []
for (name, par) in list(unet_model.parameters_and_names()):
name_list.append(name)
i = 0
for item in list(unet_model.trainable_params()):
item.name = name_list[i]
i += 1
# 定义优化器
optimizer = nn.Adam(unet_model.trainable_params(), learning_rate=lr)
loss_scaler = DynamicLossScaler(65536, 2, 1000)
# 定义前向过程
def forward_fn(data, t, noise=None):
loss = p_losses(unet_model, data, t, noise)
return loss
# 计算梯度
grad_fn = ms.value_and_grad(forward_fn, None, optimizer.parameters, has_aux=False)
# 梯度更新
def train_step(data, t, noise):
loss, grads = grad_fn(data, t, noise)
optimizer(grads)
return loss
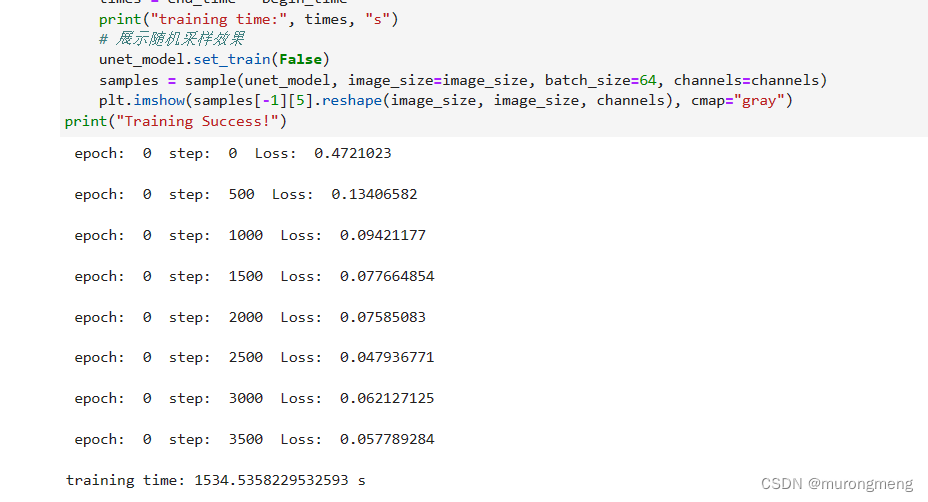
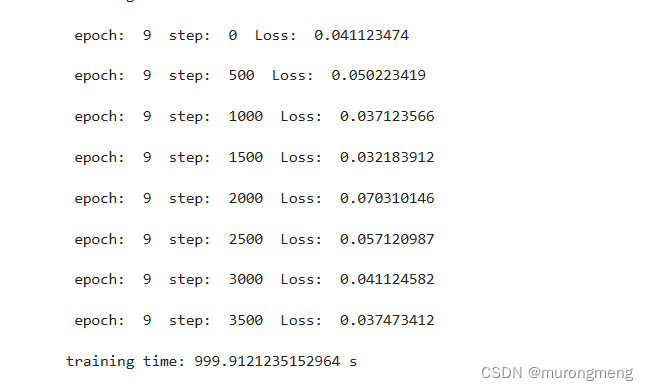
import time
epochs = 10
for epoch in range(epochs):
begin_time = time.time()
for step, batch in enumerate(dataset.create_tuple_iterator()):
unet_model.set_train()
batch_size = batch[0].shape[0]
t = randint(0, timesteps, (batch_size,), dtype=ms.int32)
noise = randn_like(batch[0])
loss = train_step(batch[0], t, noise)
if step % 500 == 0:
print(" epoch: ", epoch, " step: ", step, " Loss: ", loss)
end_time = time.time()
times = end_time - begin_time
print("training time:", times, "s")
# 展示随机采样效果
unet_model.set_train(False)
samples = sample(unet_model, image_size=image_size, batch_size=64, channels=channels)
plt.imshow(samples[-1][5].reshape(image_size, image_size, channels), cmap="gray")
print("Training Success!")
训练数据:

推理过程(从模型中采样)
# 采样64个图片
unet_model.set_train(False)
samples = sample(unet_model, image_size=image_size, batch_size=64, channels=channels)
# 展示一个随机效果
random_index = 5
plt.imshow(samples[-1][random_index].reshape(image_size, image_size, channels), cmap="gray")
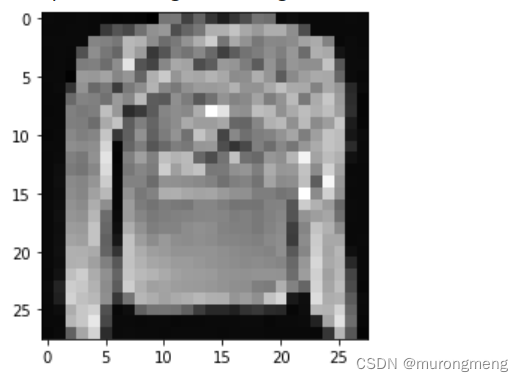
可以看到这个模型能产生一件衣服!
请注意,我们训练的数据集分辨率相当低(28x28)。
我们还可以创建去噪过程的gif:
import matplotlib.animation as animation
random_index = 53
fig = plt.figure()
ims = []
for i in range(timesteps):
im = plt.imshow(samples[i][random_index].reshape(image_size, image_size, channels), cmap="gray", animated=True)
ims.append([im])
animate = animation.ArtistAnimation(fig, ims, interval=50, blit=True, repeat_delay=100)
animate.save('diffusion.gif')
plt.show()
















 2889
2889











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









