










前言
只是为方便学习,不做其他用途,matlab程序参考平面三角形单元有限元实现——有限元实践笔记(5)
一、有限元模型
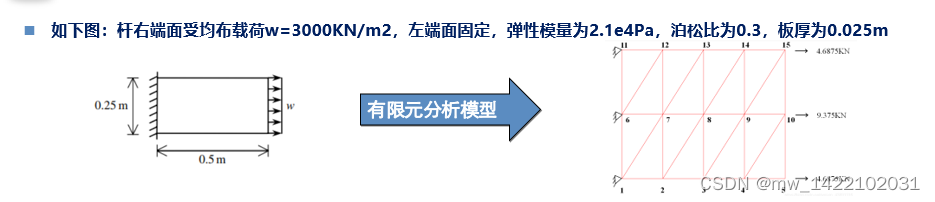
相应的理论分析可参考平面三角形单元有限元实现——有限元实践笔记(5)
或者参考有限元分析的书三角形单元部分
二、C++程序实现
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
MatrixXf ele_xy(int i, MatrixXf ele, MatrixXf Node)
{
//将第i+1个单元的节点对应的坐标 用3*2的矩阵存储起来
//提取第i+1个单元的节点编号,并且将对应的三个节点编号对应的坐标用3*2的矩阵存储起来
//ele:单元信息 Node:节点信息
MatrixXf _ele(1, 3), b(1, 3), c(1, 3), d(1, 3);
//matrix.block(i,j, p, q) : 表示返回从矩阵(i, j)开始,每行取p个元素,每列取q个元素所组成的临时新矩阵对象
_ele = ele.block(i, 1, 1, 3); //提取ele中第i+1个单元的3个节点编号 _ele:1行3列的向量
b = Node.block(_ele(0, 0) - 1, 1, 1, 2); //提取Node中第一个节点坐标
c = Node.block(_ele(0, 1) - 1, 1, 1, 2); //提取Node中第二个节点坐标
d = Node.block(_ele(0, 2) - 1, 1, 1, 2); //提取Node中第三个节点坐标
MatrixXf node(3, 2);
node << b, c, d;
return node;
}
MatrixXf Tri2D3Node_Stiffness(float E, float mu, float t, MatrixXf ele_xy, int Id)
{
//计算单元刚度矩阵,输入弹性模量E,泊松比NU,厚度t
//矩阵ele_xy 对应单元的三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym
//输入平面问题性质指示参数ID(1为平面应力问题,2为平面应变)
//输出单元刚度矩阵k(6X6)
float A, bi, bj, bm, ci, cj, cm, xi, xj, yi, yj, xm, ym;
xi = ele_xy(0,0);
yi = ele_xy(0, 1);
xj = ele_xy(1, 0);
yj = ele_xy(1, 1);
xm = ele_xy(2, 0);
ym = ele_xy(2, 1);
A = (xi * (yj - ym) + xj * (ym - yi) + xm * (yi - yj)) / 2;
bi = yj - ym;
bj = ym - yi;
bm = yi - yj;
ci = xm - xj;
cj = xi - xm;
cm = xj - xi;
MatrixXf B(3, 6);
B << bi, 0, bj, 0, bm, 0,
0, ci, 0, cj, 0, cm,
ci, bi, cj, bj, cm, bm;
B = B / (2 * A);
MatrixXf D(3, 3); // 弹性矩阵
if (Id == 1)
{
D << 1, mu, 0,
mu, 1, 0,
0, 0, (1 - mu) / 2;
D = (E / (1 - mu * mu)) * D;
}
else if (Id == 2)
{
D << 1 - mu, mu, 0,
mu, 1 - mu, 0,
0, 0, (1 - 2 * mu) / 2;
D = (E / (1 + mu) / (1 - 2 * mu)) * D;
}
//B 矩阵转置:B.transpose()
MatrixXf k(6, 6); //单元刚度矩阵的大小
k = t * A * B.transpose() * D * B;
return k;
}
MatrixXf Tri2D3Node_Assembly(MatrixXf KK, MatrixXf k, MatrixXf _ele)
{
//单元刚度矩阵的组装
//输入单元信息,得到单元的节点编号i、j、m
//输出整体刚度矩阵KK
int i, j, m;
i = _ele(0, 0);
j = _ele(0, 1);
m = _ele(0, 2);
VectorXi Dof(6); //定义一个6*1的向量
Dof << 2 * i - 2, 2 * i - 1, 2 * j - 2, 2 * j - 1, 2 * m - 2, 2 * m - 1;
for (int n1 = 0; n1 < 6; n1++)
{
for (int n2 = 0; n2 < 6; n2++)
{
KK(Dof(n1), Dof(n2)) = KK(Dof(n1), Dof(n2)) + k(n1, n2);
//注意:c++中数组和矩阵都是从0开始编号的
}
}
return KK;
}
VectorXf Solve_1_Model(MatrixXf K, VectorXf U, VectorXf P, int len_U)
{
//置“1”法求解方程组
//K:总刚 U:初始化的节点位移向量
for (int j = 0; j < len_U; j++)
{
if (U(j) == 0)
{
K.block(j, 0, 1, K.cols()).setZero(); //将总刚矩阵K的行 置“0” K.cols():K矩阵的列长
K.block(0, j, K.rows(), 1).setZero(); //将总刚矩阵K的列 置“0” K.rows():K矩阵的行长
K(j, j) = 1;
P(j) = 0; //节点力置“0”
}
}
// 节点位移
U = K.lu().solve(P); //LU分解求解线性方程组K * U = P
return U;
}
int main()
{
//初始物理量
float E = 2.1e7; //弹性模量
float mu = 0.3;
float t = 0.025; //厚度
int Id = 1; //输入平面问题性质指示参数ID(1为平面应力问题,2为平面应变),会给出不同的弹性矩阵D
//节点信息,第一列为节点编号,2-4列分别为x,y,z坐标
MatrixXf Node(15,3);
Node << 1, 0, 0,
2, 0.125, 0,
3, 0.25, 0,
4, 0.375, 0,
5, 0.5, 0,
6, 0, 0.125,
7, 0.125, 0.125,
8, 0.25, 0.125,
9, 0.375, 0.125,
10, 0.5, 0.125,
11, 0, 0.25,
12, 0.125, 0.25,
13, 0.25, 0.25,
14, 0.375, 0.25,
15, 0.5, 0.25;
//单元信息,第一列为单元编号,后面各列为单元上的节点号码
MatrixXf ele(16, 4);
ele << 1, 1, 2, 7,
2, 1, 7, 6,
3, 2, 3, 8,
4, 2, 8, 7,
5, 3, 4, 9,
6, 3, 9, 8,
7, 4, 5, 10,
8, 4, 10, 9,
9, 6, 7, 12,
10, 6, 12, 11,
11, 7, 8, 13,
12, 7, 13, 12,
13, 8, 9, 14,
14, 8, 14, 13,
15, 9, 10, 15,
16, 9, 15, 14;
int dof = Node.rows(); //节点数 15
int n_ele = ele.rows(); //单元数 16
MatrixXf k(6, 6); //单刚矩阵
MatrixXf K(dof * 2, dof * 2); //总刚的大小
K.setZero(dof * 2, dof * 2); //矩阵置0
for(int i = 0; i < n_ele; i++)
{
MatrixXf e_xy(3, 2);
e_xy = ele_xy(i, ele, Node); //第i+1个单元的节点编号 对应的坐标用3*2矩阵存储
k = Tri2D3Node_Stiffness(E, mu, t, e_xy, Id); //第i+1个单刚矩阵
MatrixXf _ele(1, 3);
_ele = ele.block(i, 1, 1, 3); //提取ele中第i+1个单元的3个节点编号
K = Tri2D3Node_Assembly(K, k, _ele);
}
cout << "总刚矩阵 K = " << endl << K.block(15, 15, 15, 15) << endl;
int len_U = 2 * Node.rows(); //节点位移矩阵长度
//节点力
VectorXf P(len_U); P.setZero();
//5、10、15 节点横向力
P(8) = 4.6875; P(18) = 9.375; P(28) = 4.6875;
//初始节点位移矩阵,将非0的节点位移先 置“1” 方便之后用置“1”法求解方程
VectorXf U(len_U); U.setOnes(); //将矩阵置1
U(0) = 0;U(1) = 0;U(10) = 0;U(11) = 0;U(20) = 0;U(21) = 0;
U = Solve_1_Model(K, U, P,len_U);
cout << "节点位移:U = " << endl << U << endl;
// 支反力
VectorXf F(len_U);
F = K * U;
cout << endl << "--------分割线-------- \n " << endl << endl;
cout << "支反力F = \n" << F << endl;
system("pause");
return 0;
}
该程序运行前需要添加eigen库
具体添加eigen库可参考C++中Eigen库的使用















 1235
1235











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









