







需求描述:
现有坐标系统,父级坐标系统 world,下有两子级系统 son1,son2,son1 相对于 world,以及 son2 相对于 world 的关系是已知的,求 son1原点在 son2中的坐标,又已知在 son1中一点的坐标,要求求出该点在 son2 中的坐标
实现分析:
- 首先,需要发布 son1 相对于 world,以及 son2 相对于 world 的坐标消息
- 然后,需要订阅坐标发布消息,并取出订阅的消息,借助于 tf2 实现 son1 和 son2 的转换
- 最后,还要实现坐标点的转换
实现流程:C++ 与 Python 实现流程一致
-
新建功能包,添加依赖
-
创建坐标相对关系发布方(需要发布两个坐标相对关系)
-
创建坐标相对关系订阅方
-
执行
1.创建功能包 tf03_tfs
创建项目功能包依赖于 tf2、tf2_ros、tf2_geometry_msgs、roscpp rospy std_msgs geometry_msgs、turtlesim
2.发布方 tfs_c.launch
为了方便,使用静态坐标变换发布 也即是ROS底层的程序,类似于turtlesim turtlesim_node
<launch>
<!-- 发布son1相对于world以及son2相对于world的坐标关系 -->
<node pkg="tf2_ros" type="static_transform_publisher" name="son1" args="5 0 0 0 0 0 /world /son1" output="screen" />
<node pkg="tf2_ros" type="static_transform_publisher" name="son2" args="3 0 0 0 0 0 /world /son2" output="screen" />
</launch>其中ags是son1相当于world的欧拉角与偏移量
启动:
roslaunch tf03_tfs tfs_c.launch
rviz
3.订阅方
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "tf2_ros/buffer.h"
#include "geometry_msgs/PointStamped.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h"
#include "geometry_msgs/TransformStamped.h"
/*
订阅方实现:1计算son1与son2的相对关系 2计算son1的中某个坐标点再son2中的坐标值
*/
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"tfs_sub");
ros::NodeHandle nh;
tf2_ros::Buffer buffer;
tf2_ros::TransformListener sub(buffer);
// 创建坐标点
geometry_msgs::PointStamped psAtSon1;
psAtSon1.header.stamp = ros::Time::now();
psAtSon1.header.frame_id = "son1";
psAtSon1.point.x = 1.0;
psAtSon1.point.y = 2.0;
psAtSon1.point.z = 3.0;
ros::Rate rate(10);
while (ros::ok())
{
try
{
//1计算son1与son2的相对关系
/*
A相对于B的坐标系关系
参数1:目标坐标系 B
参数2:源坐标系 A
参数3:ros::Time(0) 取间隔最短的两个坐标关键帧计算相对关系
返回值:geometry_msgs::TransformStamped 源相对于目标坐标系的相对关系
*/
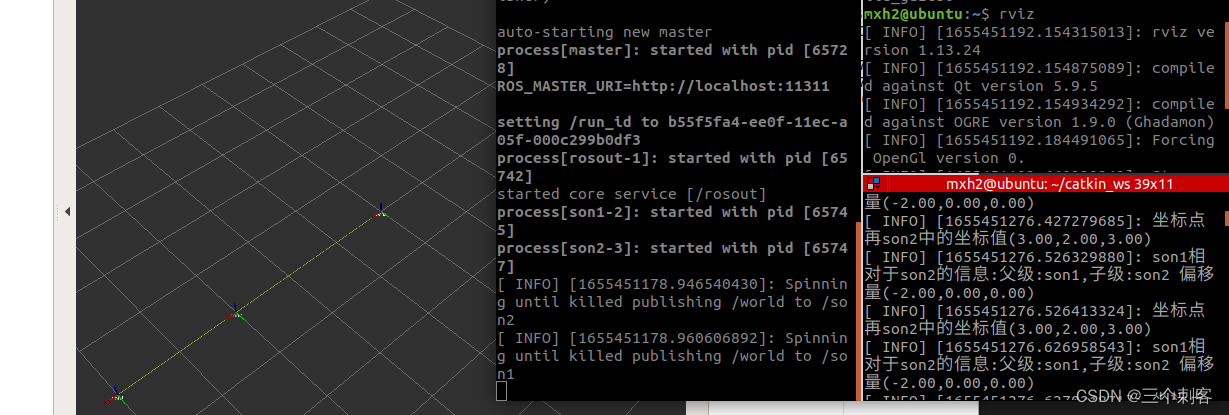
geometry_msgs::TransformStamped son1ToSon2 = buffer.lookupTransform("son1","son2",ros::Time(0));
ROS_INFO("son1相对于son2的信息:父级:%s,子级:%s 偏移量(%.2f,%.2f,%.2f) ",
son1ToSon2.header.frame_id.c_str(),
son1ToSon2.child_frame_id.c_str(),
son1ToSon2.transform.translation.x,
son1ToSon2.transform.translation.y,
son1ToSon2.transform.translation.z
);
//2计算son1的中某个坐标点再son2中的坐标值
geometry_msgs::PointStamped psAtSon2 = buffer.transform(psAtSon1,"son2");
ROS_INFO("坐标点再son2中的坐标值(%.2f,%.2f,%.2f)",
psAtSon2.point.x,
psAtSon2.point.y,
psAtSon2.point.z
);
}
catch(const std::exception& e)
{
ROS_INFO("错误提示:%s",e.what());
}
rate.sleep();
ros::spinOnce();
}
return 0;
}
坐标系关系查看
在机器人系统中,涉及的坐标系有多个,为了方便查看,ros 提供了专门的工具,可以用于生成显示坐标系关系的 pdf 文件,该文件包含树形结构的坐标系图谱。
首先调用rospack find tf2_tools查看是否包含该功能包,如果没有,请使用如下命令安装:
sudo apt install ros-noetic-tf2-tools
生成 pdf 文件
启动坐标系广播程序之后,运行如下命令:
rosrun tf2_tools view_frames.py
会产生类似于下面的日志信息:
[INFO] [1592920556.827549]: Listening to tf data during 5 seconds...
[INFO] [1592920561.841536]: Generating graph in frames.pdf file...
查看当前目录会生成一个 frames.pdf 文件
查看文件
可以直接进入目录打开文件,或者调用命令查看文件:evince frames.pdf
















 1081
1081











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









