









以三相电压矢量为例,分析电压向量和的结果。
1 原理分析
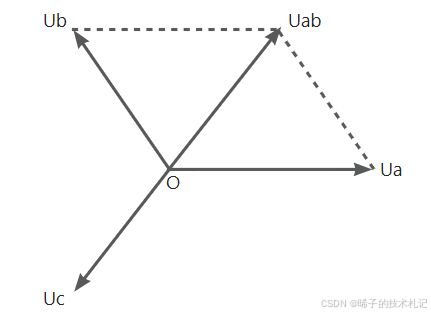
以下为三相电压矢量图,ABC正序排列,角度相差120°。从图中可以看出以下结论:
结论1:Ua和Ub的向量之和Uab,与Uc幅值相等,方向相反;
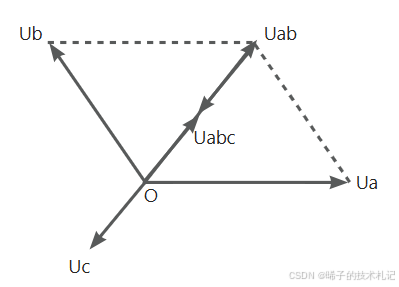
结论2:Ua、Ub和Uc三相之和为零;
其他向量原理相同
1、若三相电压不平衡,以C相为例,若C相偏小,三相电压之和的幅值为|Uab - Uc|,矢量图如下:
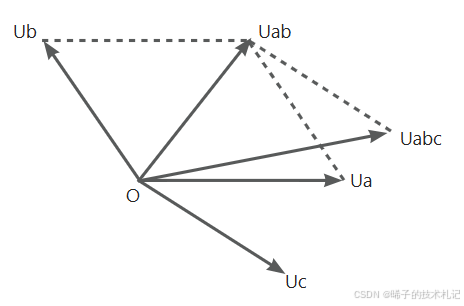
2、若三相电压相位不平衡,以C相为例,若C相与A相的相位差小于120°,矢量图如下,可以看出,三相电压之和Uabc的幅值会变大;
2 仿真结果
2.1 仿真模型
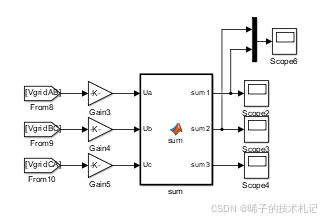
2.2 三相电网平衡
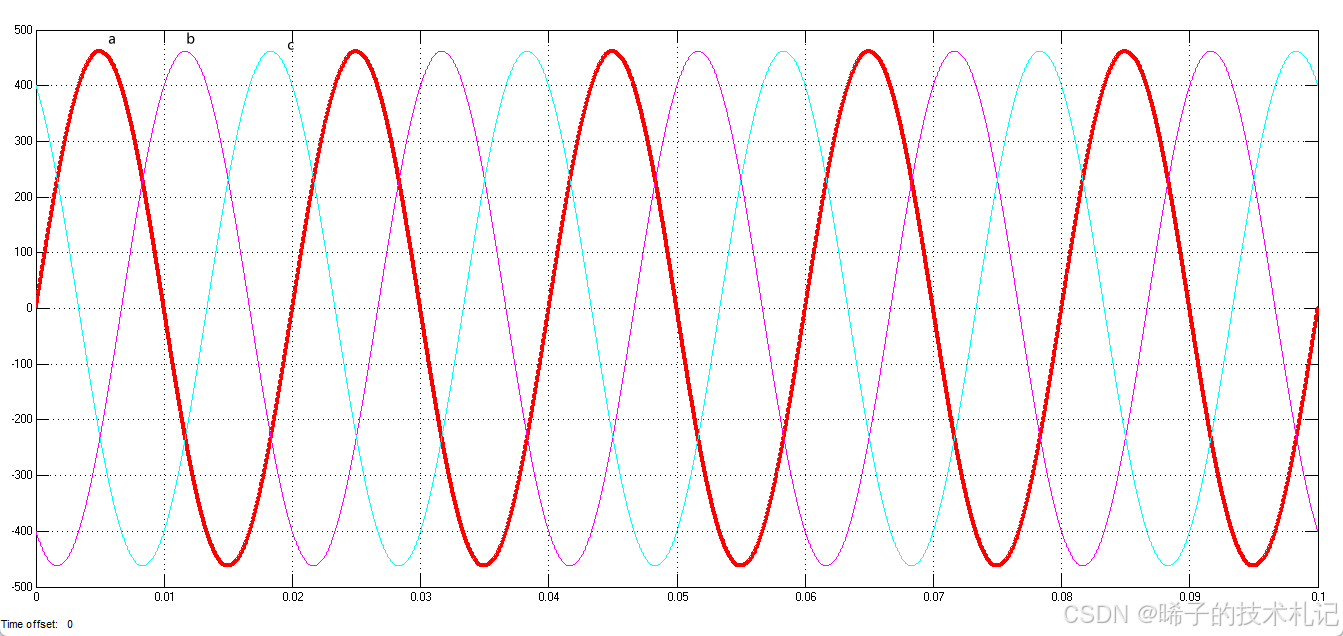
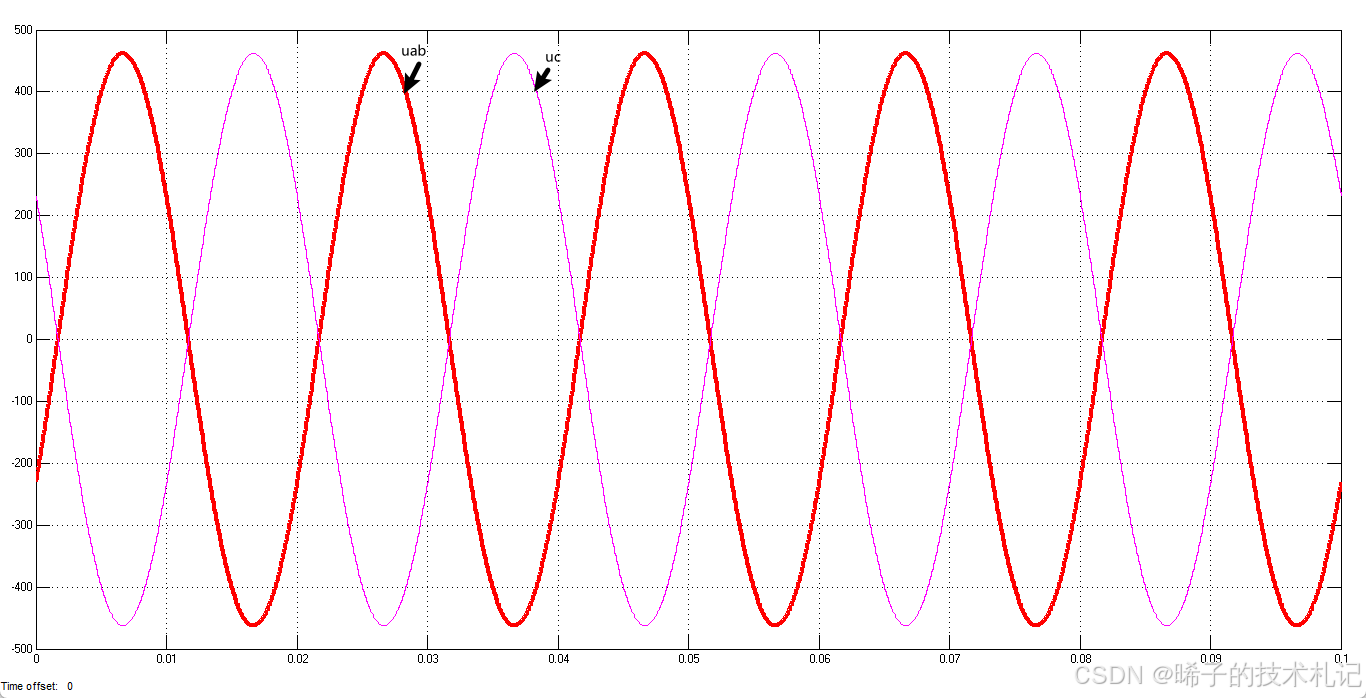
2.2.1 两相电压之和
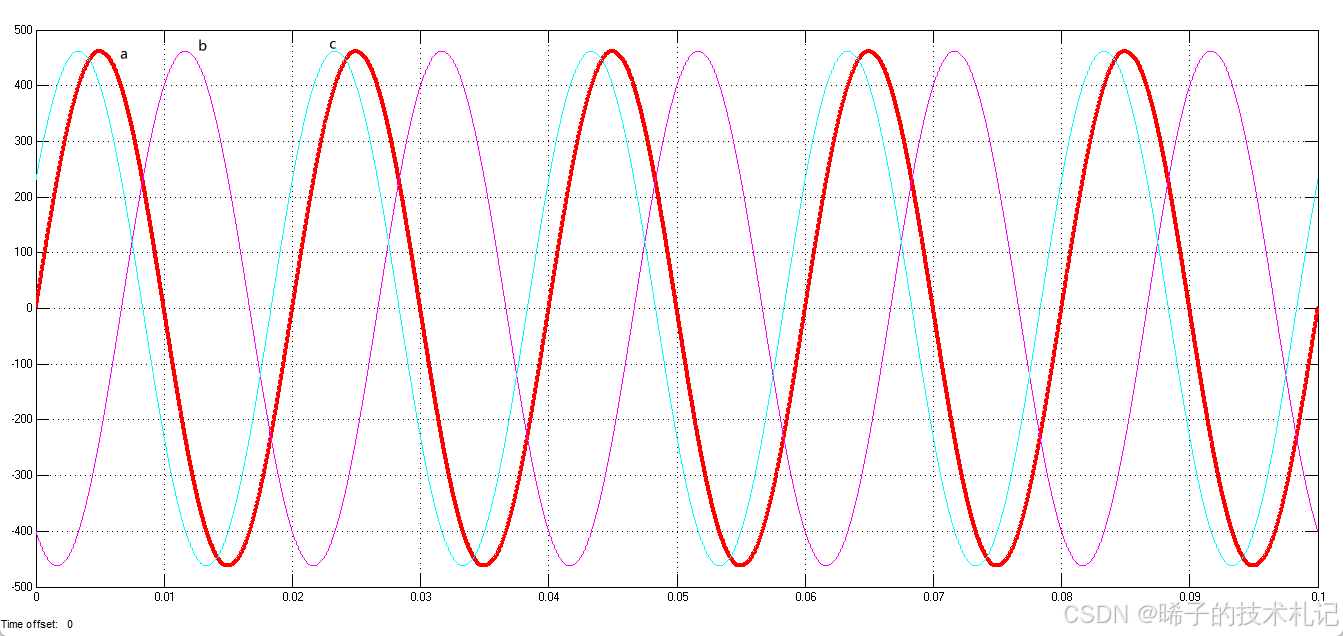
以下为电压Ua和Ub之和与电压Uc的仿真结果对比,可以看出,Uab与Uc相位相差180°,幅值相等。
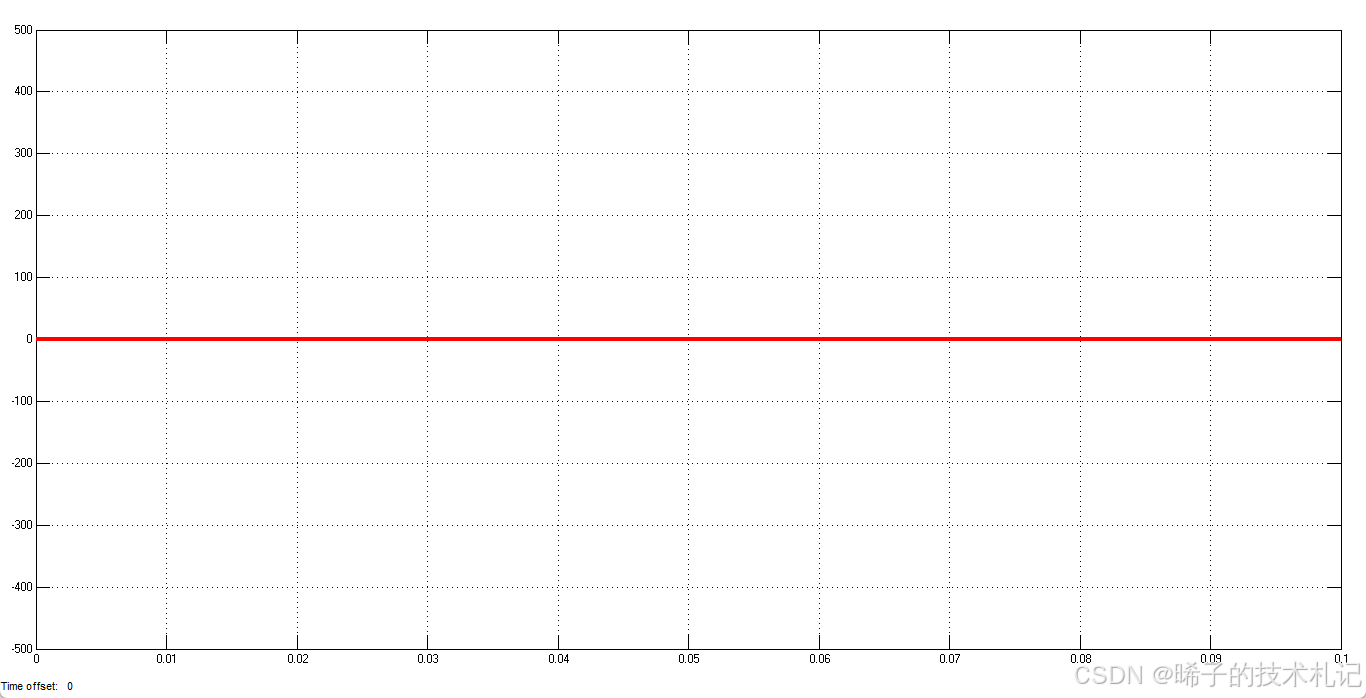
2.2.2 三相电压之和
以下为电压Ua、Ub和Uc三相之和Uabc,可以看出,幅值为0。
2.3 三相电网不平衡
2.3.1 电压不平衡
C相电压幅值小于A相和B相,三相电压之和的幅值为|Uab - Uc|,仿真结果如下:
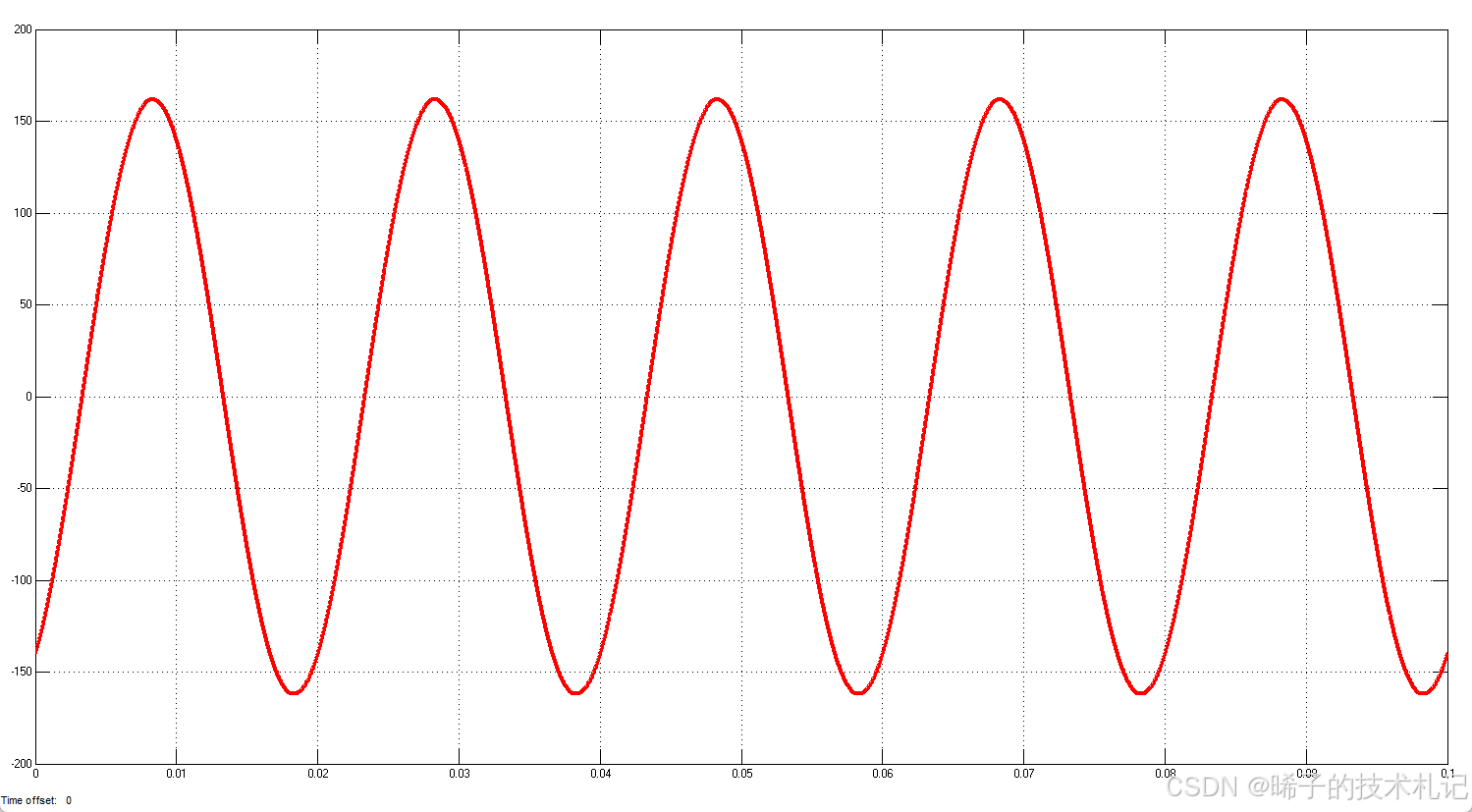
2.2.3 相位不平衡
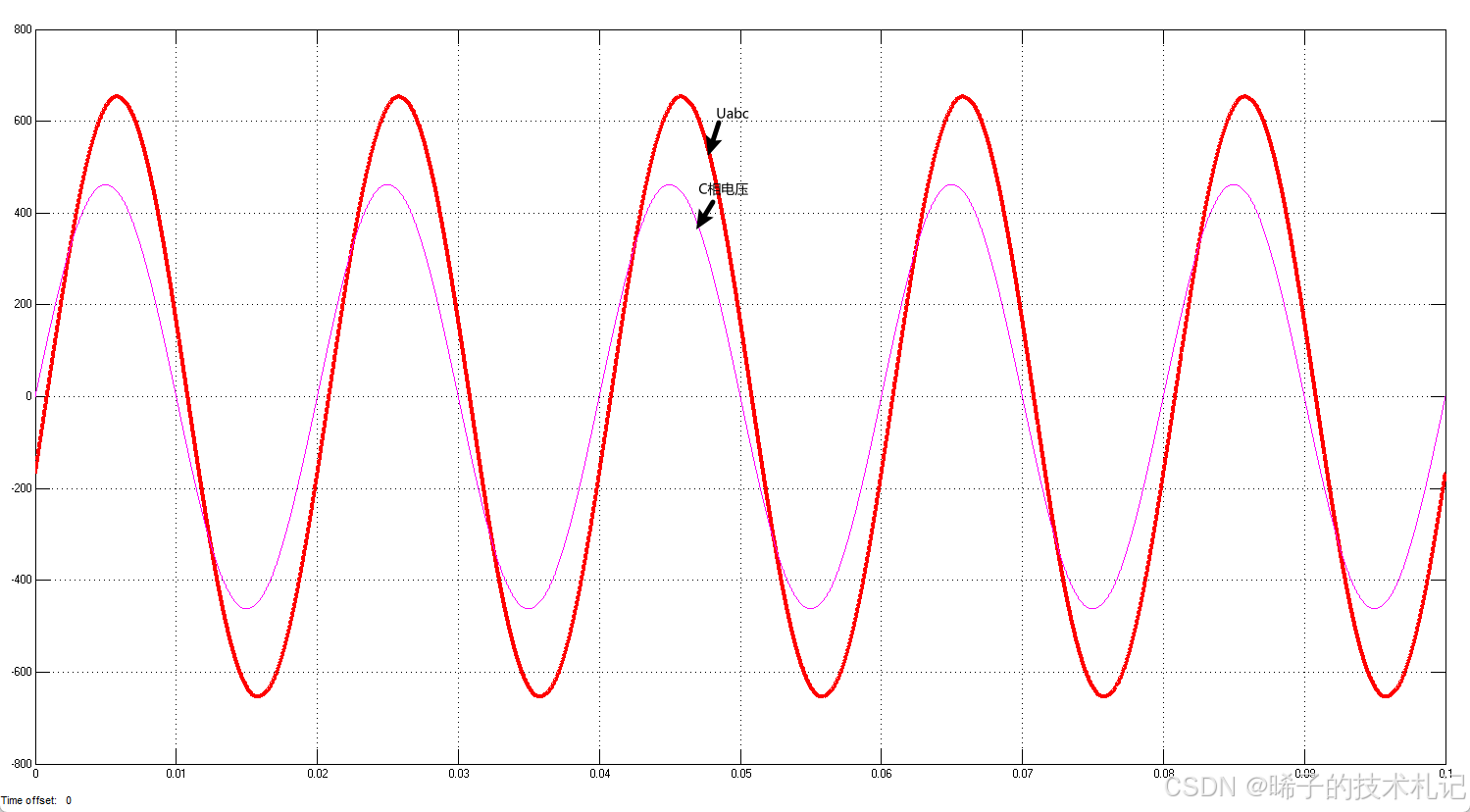
以C相为例,C相与A相的相位差为30°,从仿真结果可以看出,三相电压之和Uabc的幅值增大,且与C相电压存在相位差。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









