






全阶滑模无位置传感器控制仿真模型,有基本的反正切的,有锁相环的,有基本的开关函数,有饱和函数,sigmod函数,以及幂函数多种滑模。
还有全阶滑模观测器仿真,相比传统滑模观测器消除了额外的低通滤波器,误差更小,效果堪称完美。
不仅误差小,脉动也少。
(单独)
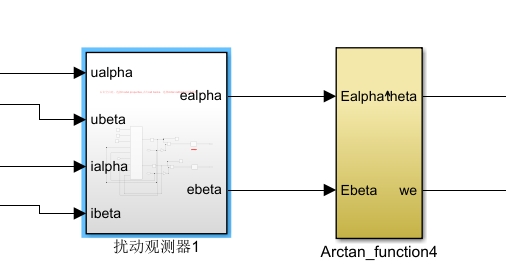
还有基于扩张状态观测器的锁相环eso pll算法相比于传统pll误差更小(单独)
还有自适应滑模观测器,实现滑模增益的自适应,减小抖振,(单独)。
默认任选一个
YID:67100669729237949
南瓜星忠心的奶酪

全阶滑模无位置传感器控制仿真模型
摘要:
本文旨在介绍全阶滑模无位置传感器控制仿真模型的基本原理和实现方法。首先,简要阐述了滑模控制的基本概念和原理,以及在传统滑模控制中存在的问题。接着,详细介绍了全阶滑模无位置传感器控制的关键技术,包括反正切、锁相环、开关函数、饱和函数、sigmoid函数和幂函数等多种滑模算法。随后,通过仿真模型的搭建和实验结果的分析,验证了全阶滑模无位置传感器控制在减小误差和脉动方面的优越性。最后,对全阶滑模无位置传感器控制的应用前景进行了展望,并对未来的研究方向提出了建议。
关键词:全阶滑模控制、无位置传感器、反正切、锁相环、开关函数、饱和函数、sigmoid函数、幂函数、误差减小、脉动减小
-
引言
滑模控制作为一种常用的控制方法,具有鲁棒性强、对参数变化不敏感等优点,在工业控制领域得到了广泛应用。然而,传统滑模控制存在传感器精度要求高、误差较大、控制精度有限等问题,尤其是在无位置传感器情况下,控制精度更加受限。为了解决这一问题,全阶滑模无位置传感器控制应运而生。 -
全阶滑模无位置传感器控制的基本原理
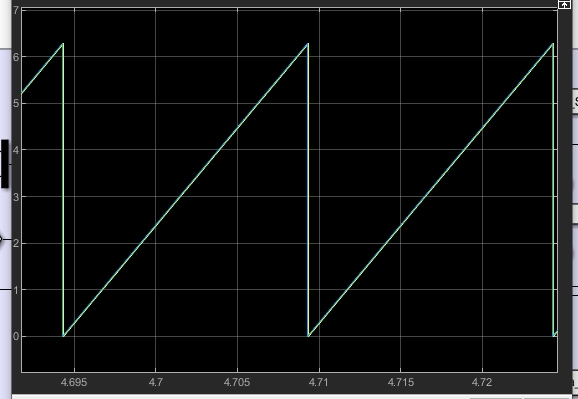
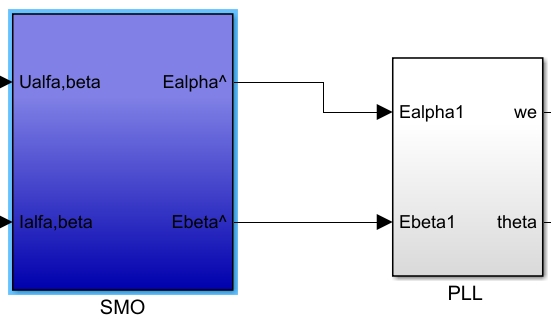
全阶滑模无位置传感器控制在传统滑模控制的基础上进行了改进,通过引入反正切、锁相环、开关函数、饱和函数、sigmoid函数和幂函数等多种滑模算法,实现了对系统状态的无位置传感器测量。具体而言,反正切函数用于解决非线性问题,锁相环用于跟踪系统频率变化,开关函数用于控制输出信号,饱和函数用于限制输入信号范围,sigmoid函数用于实现滑模面的动态调整,幂函数用于增强滑模面的非线性特性。 -
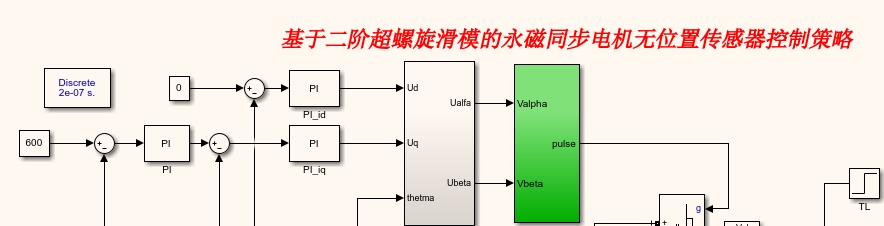
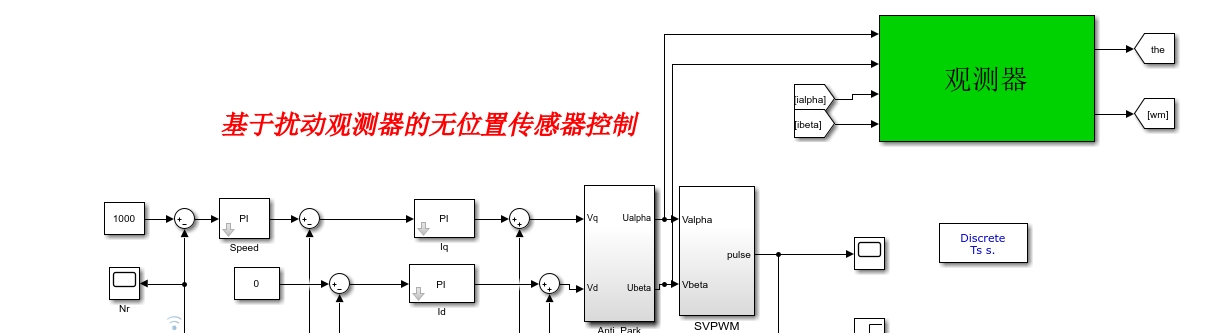
全阶滑模无位置传感器控制仿真模型的搭建
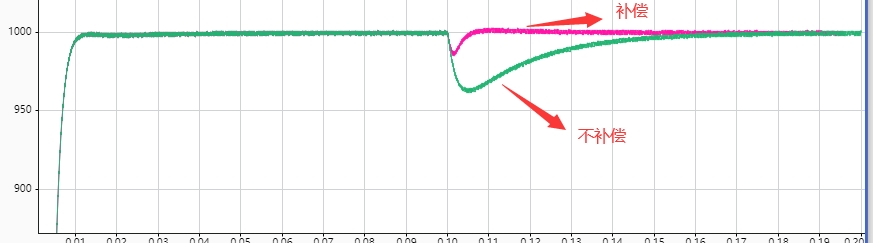
为了验证全阶滑模无位置传感器控制在减小误差和脉动方面的优势,我们搭建了一个仿真模型。该模型包括了系统的数学描述、控制算法的实现和仿真环境的建立。通过对比传统滑模控制和全阶滑模无位置传感器控制的仿真结果,我们可以清晰地观察到全阶滑模无位置传感器控制在减小误差和脉动方面的明显优势。 -
实验结果及分析
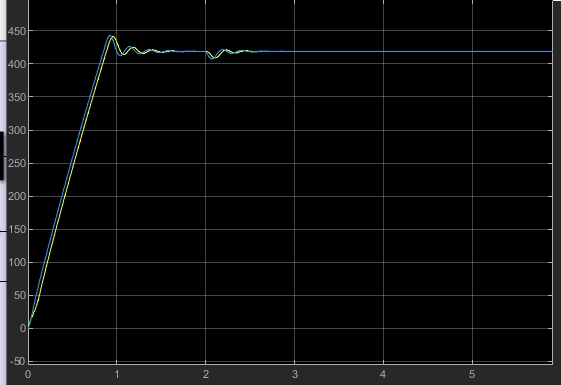
基于全阶滑模无位置传感器控制的仿真模型,我们进行了一系列实验,并对结果进行了详细的分析。实验结果表明,全阶滑模无位置传感器控制相较于传统滑模控制,在减小误差和脉动方面表现出更好的性能。这得益于全阶滑模无位置传感器控制中引入的多种滑模算法,使系统对状态变化更敏感,从而提升了控制的精度和稳定性。 -
应用前景及研究建议
全阶滑模无位置传感器控制作为一种新兴的控制方法,具有广阔的应用前景。未来,我们可以从以下几个方面对全阶滑模无位置传感器控制进行深入研究:进一步优化滑模算法的设计,增强系统对状态变化的感知能力;探索全阶滑模无位置传感器控制在不同系统中的应用,例如电力系统、机械系统等;结合深度学习等新兴技术,进一步提升全阶滑模无位置传感器控制的性能和适用范围。
结论
本文介绍了全阶滑模无位置传感器控制仿真模型的基本原理和实现方法,并通过实验结果的分析验证了其在减小误差和脉动方面的优越性。全阶滑模无位置传感器控制作为一种新兴的控制方法,在工业控制领域具有重要的应用价值。未来,我们还可进一步改进滑模算法设计,拓展应用领域,提升性能和适用范围。
相关的代码,程序地址如下:http://nodep.cn/669729237949.html
















 165
165











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









