







关于原理部分
http://blog.csdn.net/liyuanbhu/article/details/50193947
他讲的不错,俺就懒得说,无非是做最优化,不过他代码写的不咋滴,自己上个例子
namespace {
class SubImageShowWidget :public ImageShowWidget {
/*给出的点必须位于矩形内*/
template<typename _t_=double>
class LineCutXYBox {
using _value_type=_t_;
static_assert(false==std::is_reference<_t_>::value,"");
typedef std::numeric_limits<_value_type> _lt_;
static_assert(_lt_::has_infinity,"");
static_assert(_lt_::has_quiet_NaN,"");
constexpr static auto _nan() { return _lt_::quiet_NaN(); }
constexpr static auto _inf() { return _lt_::infinity(); }
constexpr static auto _negative_inf() { return -_inf(); }
template<typename __I_>
static bool _isNan(__I_&&arg) { return std::isnan(arg); }
template<typename __I_>
static bool _isInf(__I_&&arg) { return std::isfinite(arg); }
template<typename __I_>
static bool _isNegativeInf(__I_&&arg) {
return std::signbit(arg)&&_isInf(arg);
}
template<typename __I_>
static bool _isPositiveInf(__I_&&arg) {
return (false==std::signbit(arg))&&_isInf(arg);
}
/*矩形边框*/
_t_ _boxXMin; _t_ _boxXMax;
_t_ _boxYMin; _t_ _boxYMax;
/**/
_t_ _px; _t_ _py;
_t_ _dx; _t_ _dy;
/*斜率*/
/**
p2----------p1
| k2 k1 |
| p(x,y) |
| k3 k0 |
p3----------p0
**/
_t_ _k0;// =_nan();
_t_ _k1;// =_nan();
_t_ _k2;// =_nan();
_t_ _k3;// =_nan();
_t_ _k;// =_nan();
const _t_&_p0_x() const { return _boxXMax; }
const _t_&_p0_y() const { return _boxYMin; }
const _t_&_p1_x() const { return _boxXMax; }
const _t_&_p1_y() const { return _boxYMax; }
const _t_&_p2_x() const { return _boxXMin; }
const _t_&_p2_y() const { return _boxYMax; }
const _t_&_p3_x() const { return _boxXMin; }
const _t_&_p3_y() const { return _boxYMin; }
static _t_ &_ans_0_x(_t_ * arg) { return *arg; }
static _t_ &_ans_0_y(_t_ * arg) { return *(1+arg); }
static _t_ &_ans_1_x(_t_ * arg) { return *(2+arg); }
static _t_ &_ans_1_y(_t_ * arg) { return *(3+arg); }
public:
template<
typename _BoxXMin,typename _BoxXMax,
typename _BoxYMin,typename _BoxYMax,
typename _Px,typename _Py,
typename _Dx,typename _Dy
>/*将数据拷贝一遍,并转型*/
LineCutXYBox(
_BoxXMin && argXMin,_BoxXMax&& argXMax,
_BoxYMin && argYMin,_BoxYMax&& argYMax,
_Px && argPx,_Py && argPy,
_Dx && argDx,_Dy && argDy,
_t_*ans):
_boxXMin(argXMin),_boxXMax(argXMax),
_boxYMin(argYMin),_boxYMax(argYMax),
_px(argPx),_py(argPy),
_dx(argDx),_dy(argDy) {
assert((_px>_boxXMin)&&"只支持点在矩形内");
assert((_px<_boxXMax)&&"只支持点在矩形内");
assert((_py>_boxYMin)&&"只支持点在矩形内");
assert((_py<_boxYMax)&&"只支持点在矩形内");
assert(((argDx!=0)||(argDy!=0))&&"dx,dy不能都是零");
assert((argYMin<argYMax)&&"min必须小于max");
assert((argXMin<argXMax)&&"min必须小于max");
/*求斜率*/
_k0=(_p0_y()-_py)/(_p0_x()-_px);
_k1=(_p1_y()-_py)/(_p1_x()-_px);
_k2=(_p2_y()-_py)/(_p2_x()-_px);
_k3=(_p3_y()-_py)/(_p3_x()-_px);
if (_dx) {
_k=_dy/_dx;
}
/*求取结果*/
_construct(ans);
}
private:
void _construct(_t_ * ans) const {
if (_dx==0) {
_ans_0_x(ans)=_px;
_ans_0_y(ans)=_boxYMin;
_ans_1_x(ans)=_px;
_ans_1_y(ans)=_boxYMax;
return;
}
if (_dy==0) {
_ans_0_x(ans)=_boxXMin;
_ans_0_y(ans)=_py;
_ans_1_x(ans)=_boxXMax;
_ans_1_y(ans)=_py;
return;
}
/**
p2----------p1
| k2 ? k1 |
| 0 p(x,y) 0|
| k3 ? k0 |
p3----------p0
**/
int ansCount=0;
if (_k==_k0) {
_ans_0_x(ans)=_p0_x();
_ans_0_y(ans)=_p0_y();
ans+=2;
ansCount=1;
}
if (_k==_k1) {
_ans_0_x(ans)=_p1_x();
_ans_0_y(ans)=_p1_y();
ans+=2;
++ansCount;
}
if (ansCount>1) { return; }
if (_k==_k2) {
_ans_0_x(ans)=_p2_x();
_ans_0_y(ans)=_p2_y();
ans+=2;
++ansCount;
}
if (ansCount>1) { return; }
if (_k==_k3) {
_ans_0_x(ans)=_p3_x();
_ans_0_y(ans)=_p3_y();
ans+=2;
++ansCount;
}
if (ansCount>1) { return; }
if ((_k>_k0)&&(_k<_k1)) {
_ans_0_x(ans)=_boxXMax;
_ans_0_y(ans)=_k*(_boxXMax-_px)+_py;
ans+=2;
++ansCount;
}
if (ansCount>1) { return; }
if ((_k>_k2)&&(_k<_k3)) {
_ans_0_x(ans)=_boxXMin;
_ans_0_y(ans)=_k*(_boxXMin-_px)+_py;
++ansCount;
ans+=2;
}
if (ansCount>1) { return; }
if ((_k>_k3)||(_k<_k0)) {
_ans_0_y(ans)=_boxYMin;
_ans_0_x(ans)=(_boxYMin-_py)/_k+_px;
++ansCount;
ans+=2;
}
if (ansCount>1) { return; }
if ((_k>_k1)||(_k<_k2)) {
_ans_0_y(ans)=_boxYMax;
_ans_0_x(ans)=(_boxYMax-_py)/_k+_px;
assert(ansCount==1);
}
else {
assert(false);
}
}
};
public:
using points2d_t=decltype(toCVFloat32Point2Vector());
points2d_t data_points2d;
ChartBasic * data_chart=nullptr;
QtCharts::QLineSeries * data_line=nullptr;
public:
template<typename _Tb,typename _Te>
SubImageShowWidget(const _Tb & arg_b,const _Te& arg_e) {
data_points2d=toCVFloat32Point2Vector(arg_b,arg_e);
using namespace memory;
/*设置散点视图*/
auto&& view=makeStackPointer<DataChartView>();
this->setChartView(view.release());
data_chart=view->dataChart();
/*调整坐标轴*/
fitChartAxisRange(data_chart,
data_points2d.begin(),
data_points2d.end());
/*增加散点*/
{
auto series=
addScatterSeries(data_chart,arg_b,arg_e);
series->setPen(QPen(QColor(233,6,2,177),0));
series->setBrush(QColor(233,6,2,80));
}
/*设置参数面板*/
{
auto && fitLineDialog=makeStackPointer<FitlineDialog>();
this->addImageWidget(
fitLineDialog.release(),
Qt::RightDockWidgetArea
)->setWindowTitle(QString::fromUtf8(
u8R"(参数面板)"));
/*连接信号槽*/
connect(fitLineDialog.pointer(),
&FitlineDialog::valueChanged,
this,&SubImageShowWidget::updateLine);
fitLineDialog->emitValueChanged();
}
}
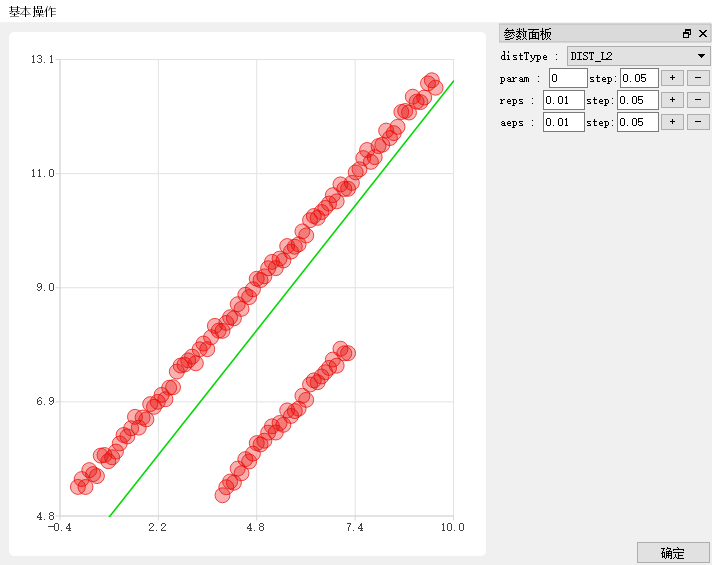
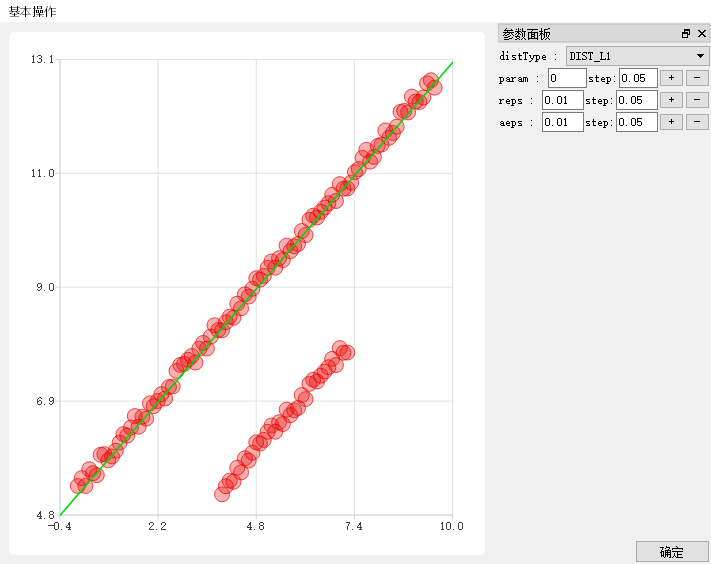
void updateLine(
int distType/*算法类型*/,
double param/*算法中的常数,如果输入0则opencv自动选择*/,
double reps/*距离精度*/,
double aeps/*角度精度*/) {
/*opencv 曲线拟合*/
try {
auto rows=static_cast<int>(data_points2d.size());
constexpr static auto cols=2;
/*创建ref矩阵,不拷贝数据*/
cv::Mat data(
rows,
cols/*2*/,
cv::DataType<cv::Point2f::value_type>::type,
data_points2d.data()
);
/*dx,dy,x0,y0*/
cv::Vec4f varAns;
/*opencv直线拟合*/
cv::fitLine(data,varAns,
distType,
param,
reps,
aeps);
/*绘制直线*/
this->drawLine(varAns);
}
catch (...) {
CPLUSPLUS_EXCEPTION(false);
}
}
void drawLine(const cv::Vec4f & varAns) {
if ((varAns[0]==0)&&(varAns[1]==0)) {
return;
}
auto & chart=data_chart;
QVector<QPointF> points;
points.resize(2);
{
const LineCutXYBox<qreal>eval(
chart->imageXAxis()->min(),
chart->imageXAxis()->max(),
chart->imageYAxis()->min(),
chart->imageYAxis()->max(),
varAns[2],varAns[3],
varAns[0],varAns[1],
reinterpret_cast<qreal*>(points.data())
);
}
auto & line=data_line;
if (line) {
line->replace(points);
}
else {
line=addLineSeries(chart,points);
line->setPen(QPen(QColor(2,215,4),1.6));
}
}
private:
CPLUSPLUS_OBJECT(SubImageShowWidget)
};
}















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









