






 本文介绍了欧拉角的组成(横滚、俯仰、偏航),以及在惯性坐标系中的定义和注意事项。重点讲解了旋转矩阵的推导,强调了旋转顺序(zyx)的重要性,并区分了内旋(在变换坐标系上执行)和外旋(围绕世界坐标轴)。同时提供了Pythonscipy库中Rotation类的使用示例来演示这两种旋转方式的区别。
本文介绍了欧拉角的组成(横滚、俯仰、偏航),以及在惯性坐标系中的定义和注意事项。重点讲解了旋转矩阵的推导,强调了旋转顺序(zyx)的重要性,并区分了内旋(在变换坐标系上执行)和外旋(围绕世界坐标轴)。同时提供了Pythonscipy库中Rotation类的使用示例来演示这两种旋转方式的区别。
目录
欧拉角介绍
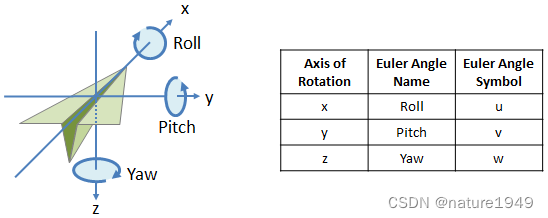
欧拉角:
横滚:roll(绕X轴旋转);
俯仰:pitch(绕Y轴旋转);
偏航(也称航向角):yaw或者heading(绕Z轴旋转)。
注意:一般xyz坐标轴为前左上(KITTI数据集),或者右前上(华测惯导),或者前右下(常见于国外教材)等等,可以随意定义,(这是惯性坐标系,i系)。而当右前上时,xyz对应的旋转分别是pitch,roll, yaw,且pitch头向上为正,和前左上时正方向相反。前右下的yaw和前左上正方向相反。
(总结:注意坐标轴方向的定义及正方向问题)
注意2:yaw是全局角度,一般以正北为0,逆时针为正(国产惯导);也可以定义为正东为0,逆时针为正(KITTI数据集);也可以是其他任意定义。
(总结:注意yaw的方向和旋转正方向)
注意3:roll和pitch一般范围为±90°,yaw的角度范围为0~360°或-180~180°,需要根据实际需要进行变换。
(总结:注意yaw的范围)
可视化说明参照:pitch、yaw、roll三个角的区别-CSDN博客
旋转矩阵公式推导
旋转符合右手定则。假设旋转轴顺序为zyx,分别对应yaw(γ)、pitch(β)、roll(α),则旋转矩阵表示为:
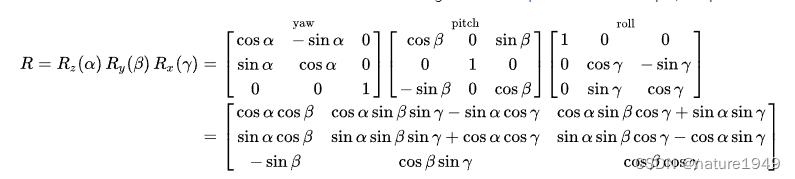
旋转矩阵的推导资料很多了,此处不加赘述。
本文章主要针对旋转顺序和内旋/外旋做明确的解释。
旋转顺序
旋转顺序可以是任意设置的。但常见的默认顺序是zyx,对应yaw,pitch,roll。尤其是在做INS/GPS全局局部数据互相转化时。
注意:旋转顺序不同结果也不同,不能随意改变。比如zyx对应yaw,pitch,roll,与xyz对应roll,pitch,yaw的旋转矩阵都是不同的,对应的点或向量的变换结果也不同。随意改变旋转顺序结果就是错的。
默认按照zyx对应yaw,pitch,roll进行旋转!!!
内旋/外旋
内旋:每个基本旋转都是在先前操作旋转的坐标系上执行的。
也就是说,比如绕z旋转之后再绕y轴旋转,这个y轴就是旋转之后的新y轴。
外旋:每次旋转都是围绕世界坐标系的轴进行的,世界坐标系不移动。
也就是说,比如绕z旋转之后再绕y轴旋转,这个y轴还是变换之前的那个y轴。
import numpy as np
from scipy.spatial.transform import Rotation as Rot
point = np.array([1,0,0])
rpy = np.array([0, np.pi/4, np.pi/2])
##################### 内旋
# 内旋@need_trans_point = 对n坐标系中的点进行活动坐标旋转后(将n系中的点转到b系中后)(也就是b坐标系中的点)在n坐标系下的位置,用ZYX,ypr,此中need_trans_point表示在n系下的初始位置。和下面一个意思。
# 内旋@need_trans_point = b坐标系中的点在n坐标系下的位置,用ZYX,ypr,此中need_trans_point表示在b系下的初始位置
# 内旋.T@need_trans_point = n坐标系中的点在b坐标系下的位置,用ZYX,ypr,此中need_trans_point表示在n系下的初始位置
nx=Rot.from_euler('ZYX', rpy[::-1], degrees=False).as_matrix() ## 注意:zyx需要对应yaw,pitch,roll。
nx1=Rot.from_euler('xyz', rpy, degrees=False).as_matrix() ## 每种特定顺序的外旋等价于其相反顺序的内旋。结果和上面等价
##################### 外旋
# 外旋@need_trans_point = 对原坐标系中的点进行固定坐标旋转后在原坐标系下的位置,用zyx,ypr,此中need_trans_point表示在n系下的初始位置
# 外旋.T@need_trans_point = 原坐标系中的点在经固定坐标旋转后的新坐标系下的位置,用zyx,ypr
wx=Rot.from_euler('zyx', rpy[::-1], degrees=False).as_matrix()
wx1=Rot.from_euler('XYZ', rpy, degrees=False).as_matrix()
print(wx@point, wx1@point, nx@point, nx1@point, )
print(wx.T@point, wx1.T@point, nx.T@point, nx1.T@point,)
内旋与外旋详细区别参考代码及其注释。
解释:以上代码以scipy,rotation为工具。其中,'ZYX'大写为内旋,'zyx'小写时为外旋(具体参照下面官方说明)。
可查看scipy文档有关rotation说明:
 https://www.osgeo.cn/scipy/reference/generated/scipy.spatial.transform.Rotation.from_euler.html
https://www.osgeo.cn/scipy/reference/generated/scipy.spatial.transform.Rotation.from_euler.html可借助在线工具计算内旋的旋转矩阵(旋转顺序yaw,pitch,roll,对应zyx):Rotation Tool
欢迎交流!


















 2173
2173

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









