







人与车辆的轨迹体现了交通基础设施的重要信息,在许多涉及轨迹数据分析的实际应用中,轨迹相似度计算具有重要意义。近年来,基于深度学习的轨迹相似技术有望提高传统相似技术的效率和适应性。然而,现有的轨迹相似性学习方案强调的是空间相似性而不是时间相似性,这使得它们在时间感知分析中不是最优的。
为此,本文提出ST2Vec,一种基于轨迹表示学习的架构,考虑轨迹对之间的细粒度空间和时间相关性,用于道路网络中的时空相似性学习。据我们所知,这是第一个用于时空轨迹相似性分析的深度学习方案。具体来说,ST2Vec包括三个阶段:(i)选择代表性训练样本的训练数据准备;(ii)空间和时间建模,编码轨迹的空间和时间特征,其中设计了通用时间建模模块(TMM);(iii)时空协同注意力融合(STCF),其中开发了一种统一融合(UF)方法,以帮助生成统一的时空轨迹嵌入,捕捉轨迹之间的时空相似性关系。此外,受课程概念的启发,ST2Vec利用课程学习进行模型优化,以提高收敛性和有效性。实验研究表明,ST2Vec在有效性、效率和可扩展性方面大大优于所有最先进的竞争对手,同时显示出低参数敏感性和良好的模型鲁棒性。此外,基于相似度计算的top-k相似度查询和轨迹聚类案例研究进一步展示了ST2Vec的能力
阅读者总结:这篇论文是利用embidding 方法实现时空数据相似性度量。文中考虑到了时间维度和空间维度,应该说文中的新颖点在于时空嵌入建模上面,其实有大量论文利用embidding方法处理时空相似性学习问题,因此采用这种方式本身没有什么新颖点,1)学习如何将不同维度上的embidding实现联合度量,统一到一个框架中,2)如何有效的提高模型效率
背景:利用神经网络学习轨迹相似度进行相似度计算。其核心任务是通过神经网络获得轨迹表示(嵌入),以便在该嵌入空间中很好地体现轨迹之间的相似关系。因此,给定一对轨迹,轨迹相似性学习方法首先将轨迹映射为d维向量,然后基于它们的嵌入向量计算轨迹之间的相似性
方法:
本文对现有的空间驱动相似性学习研究遵循一种正交但互补的方法——解决道路网络中的时空轨迹相似性学习问题。为了实现这一目标,一种直接的方法是将时间分割为离散的时隙,然后使用现有的空间相似性学习技术在每个时隙中进行时空相似性计算。然而,该方法将时间和空间分开处理,时间维度的粗粒度离散化也不能充分利用时间信息。相反,一个更有希望的方向是学习统一的时空嵌入,捕捉轨迹之间复杂的时空相似性。尽管现有研究[12],[36],[38],[43]为空间嵌入提供了指导,但仍有3个重要挑战有待解决,包括时间嵌入、时空融合和模型优化。
挑战I:如何捕捉轨迹之间的时间相关性进行时间相似性学习?
其核心任务是生成面向时间的嵌入,其中轨迹之间的时间相似性关系(即近或远)保持不变。
时间建模比空间建模更具挑战性。不同于轨迹的空间位置是离散的,可以通过特定的度量来评估空间关系,时间信息表现出强烈的连续和周期模式。因此,时间表示必须对时间缩放保持不变。其次,轨迹具有很强的周期性,这也影响了时间相似性计算。因此,直接将时间信息输入rnn进行时间维度嵌入是无效的,因为它无法解决上述问题。设计了一个时序建模模块TMM,以实现有效的时序轨迹相似性表示学习。该模块具有灵活性和通用性,可以与任何现有的空间轨迹相似性学习方案[12],[36],[38],[43]进行时空相似性学习。
挑战二:如何融合时空轨迹嵌入实现统一的时空相似性学习?
本文开发了一种时空协同注意力融合模块,称为STCF,用统一的融合方法融合单独的空间和时间信息,以获得统一的嵌入。
挑战三:如何优化模型以提高有效性和效率?
基于学习的轨迹相似性分析的两个主要目标是有效性(相似性查询质量)和效率(模型收敛速度)。具体来说,训练样本、学习过程和神经网络参数都可能影响模型的性能。为了提高有效性,设计了一种新的三元组采样策略,然后使用课程学习进行模型训练。为了避免时空建模带来的参数过多和提高效率,在co-attention融合模块中提供了两种不同的融合方法。
为应对这三个挑战,本文提出一种基于表示学习的架构ST2Vec,利用轨迹中的细粒度空间和时间信息,实现路网中统一的时空相似性学习。
A. Road Networks & Trajectories

B. Spatio-Temporal Similarity & Learning Targets
本文在不失一般性的前提下,将时空相似性测度线性地结合起来定义时空相似性,这也是ST2Vec的学习目标。

问题:
框架:

本文提出一种新的基于表示学习的架构,称为ST2Vec,能够利用轨迹中的细粒度时间和空间信息来实现统一的时空相似性学习。图2显示了ST2Vec的架构和训练方案。它需要相似和不相似的锚点轨迹对来构建同时考虑空间(即T(s))和时间(即T(T))维度的输入相似性三元组。然后,ST2Vec学习嵌入轨迹,将轨迹映射到低维空间,其过程如图2中的虚线矩形所示。这个过程继续进行,直到在嵌入向量上评估的轨迹相似性(由浅蓝色和浅黄色的立方体表示)近似于由等式1计算的地面真实相似性(由蓝色和黄色的立方体表示)
为了生成面向时空相似性的嵌入(如图2中带红边的绿色矩形),必须捕获轨迹中的时间和空间信息,并以统一的方式融合这些信息。为此,STVec具有3个主要模块,即时间建模模块(TMM)、空间建模模块(SMM)和时空协同注意力融合模块(STCF)。下面将介绍这些模块。这种具有三个模块的设计,可以用任何现有的空间相似性学习模块替换SMM,以实现时空感知的相似性学习。
THE ST2VEC APPROACH

为了实现细粒度的时间表示学习,将时间嵌入与时间序列嵌入相结合,构建了一个轨迹感知的时间序列建模模块。此外,我们注意到不同的时间点可能具有不同的重要性,例如,高峰时段和深夜。进一步引入注意力函数来增强时间不规则性的表示。
B. Spatial Modeling Module (SMM)
给定一个空间轨迹T(s) = hl1, l2,…, lmi (li表示G中的顶点),旨在将T(s)嵌入为低维空间中的向量vT(s),捕捉其路网约束的空间信息。由于底层路网的空间依赖关系,自然要利用gnn来考虑G的结构,因为gnn已成功应用于路网设置,如区域分类[37]和交通预测[44]。为实现面向空间相似性的表示学习,开发了空间建模模块(SMM),包括三个阶段,即位置嵌入、空间序列嵌入和空间注意力。
C. Spatio-Temporal Co-attention Fusion (STCF)
本文提出融合轨迹隐藏的空间和时间信息来生成面向时空的嵌入。本文提出一种时空协同注意力融合模块,使用两种融合策略。
1) Separate Fusion (SF): 基于时间序列嵌入(Section IV-A)和空间序列嵌入(Section IV-B),我们可以分别嵌入时间和空间轨迹。因此,一个直接的方法是首先用两个单独的LSTM模型生成轨迹的空间和时间嵌入,然后将两种类型的嵌入结合起来
2) Unified Fusion (SF):给定一个轨迹,根据前述的时间嵌入和位置嵌入过程,可以得到其初始的时间序列嵌入

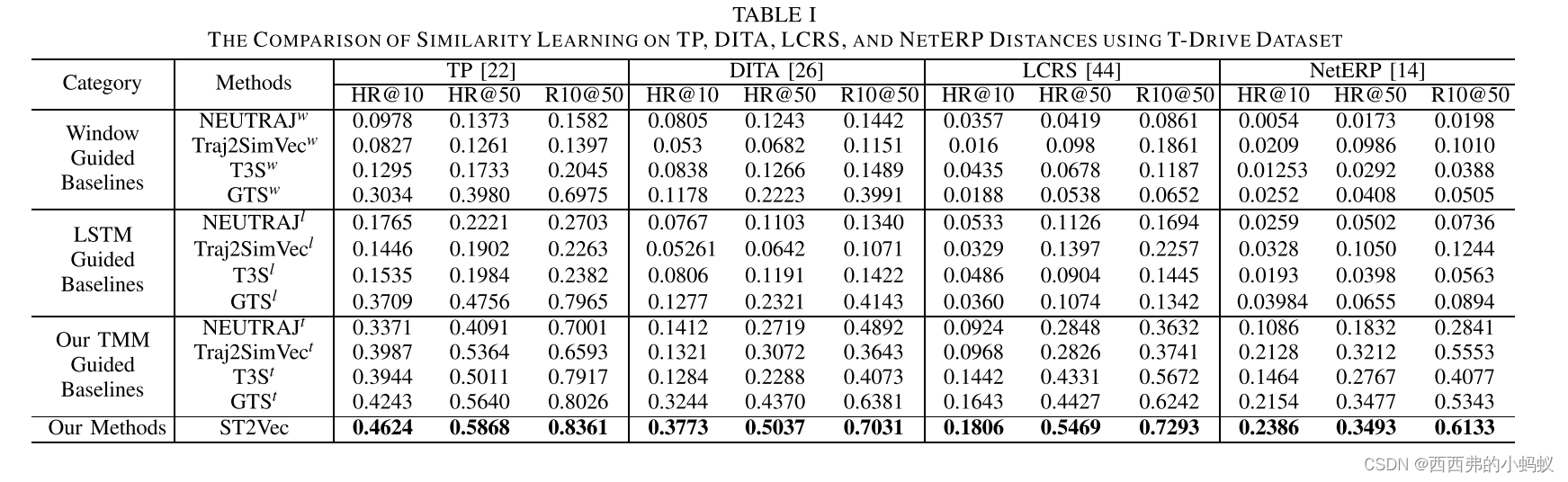
V. EXPERIMENTAL STUDY

















 1107
1107











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









