







 本文介绍了在项目中使用AM600与汇川SV630N和IS650N单轴控制器通过EtherCAT通讯控制的实践,包括基本调试步骤、参数设置、遇到的问题及解决方案。调试过程中,编写了FB形式的程序块以提高编程效率,并详细阐述了伺服功能码参数的调整,以及伺服驱动器的特定注意事项。
本文介绍了在项目中使用AM600与汇川SV630N和IS650N单轴控制器通过EtherCAT通讯控制的实践,包括基本调试步骤、参数设置、遇到的问题及解决方案。调试过程中,编写了FB形式的程序块以提高编程效率,并详细阐述了伺服功能码参数的调整,以及伺服驱动器的特定注意事项。
最近项目上使用了AM600跟汇川SV630N和IS650N通过EtherCAT通讯控制的实例,写下基本调试思路及参数设置和遇到的问题及分析。
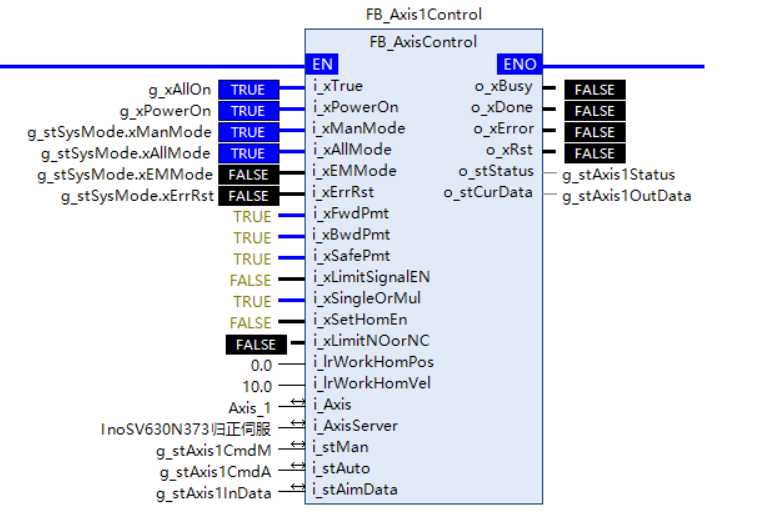
基本思路:在使用SV630N根IS650N之前我是官网下了一些AM600控制这两种控制器的相关编程资料,通过资料说明编写了这两种控制器的程序块,因为我工位上有大概22根轴,所以写成FB的形式比较方便提高编程效率[可以参照我另一篇FB/FC的使用]。其次再通过我需要的运控形式,确定下我需要调整的伺服内部功能码参数;第三进行实际分析调试
参数设置</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2390
2390

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











