






七自由度车辆模型:Matlab Simulink主动控制力的车辆仿真分析
随着科技的飞速发展,计算机仿真技术在车辆工程领域的应用越来越广泛。在本次技术博客中,我们将深入探讨一个高级的Matlab Simulink七自由度车辆模型,特别是其悬架具有主动控制力的七自由度整车模型。该模型旨在模拟真实车辆在特定路面条件下的动力学行为,为工程师和研究人员提供有力的分析工具。
一、模型背景与意义
在当今汽车工业中,车辆性能和安全性日益受到重视。主动悬挂作为一种重要的车辆设计元素,在提高车辆操控性和舒适性方面发挥了重要作用。该七自由度车辆模型是利用Matlab Simulink进行构建的,通过模拟车辆在不同路面条件下的动力学行为,为工程师和研究人员提供了深入了解车辆性能的宝贵工具。该模型可以模拟悬架的主动控制力对车辆动力学的影响,这对于优化车辆设计、提高操控性能和安全性具有重要意义。
二、模型介绍
该七自由度车辆模型涵盖了多个参数的可调选项,包括路面不平度、车轮位置、车身位移、俯仰角、侧倾角等。通过参数调整,可以模拟不同路况下的车辆动力学行为,为工程师和研究人员提供全面的仿真分析。该模型是基于Matlab 2016a及以上版本的先进仿真工具构建的,具备高度的灵活性和可扩展性。
三、模型工作流程
工作流程方面,该模型主要基于以下几个步骤进行:
- 数据输入:首先,工程师需要输入路面不平度数据,这些数据将用于模拟不同的道路条件。同时,还需要输入车轮位置、车身位移、俯仰角、侧倾角等动力学参数。
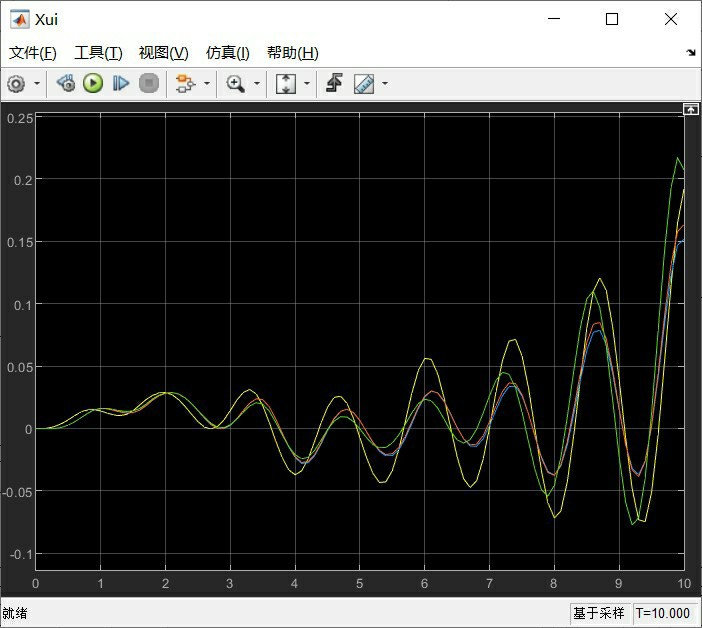
- 仿真分析:通过Matlab Simulink进行仿真分析,可以得到车辆在不同路面条件下的动力学响应。包括车轮位置、车身位移、俯仰角、侧倾角等的变化情况。
- 结果解读:通过对仿真结果进行分析,可以深入了解车辆在不同路况下的动力学行为,为优化车辆设计提供依据。
四、关键技术分析
该七自由度车辆模型的构建关键在于以下几个方面:
- Simulink模块集成:利用Simulink模块构建模型,实现了对车辆动力学行为的精确模拟。Simulink模块具有高度的灵活性和可扩展性,可以方便地添加新的模块和参数调整。
- 参数可调性:模型中提供了多个参数的可调选项,工程师可以根据实际需求进行参数调整,以模拟不同路况下的车辆动力学行为。
- 先进仿真技术:采用先进的仿真技术,实现了对车辆动力学行为的精确模拟,提高了仿真结果的准确性。
五、实际应用与前景展望
该七自由度车辆模型在实际应用中具有广泛的前景。它可以为汽车工程师和研究人员提供全面的仿真分析工具,帮助他们深入了解车辆在不同路况下的动力学行为,为优化车辆设计提供依据。同时,该模型还可以应用于汽车研发、质量控制等领域,为提高汽车性能和安全性提供有力支持。未来,随着计算机仿真技术的不断发展,该七自由度车辆模型将会在汽车工程领域发挥更加重要的作用。
六、总结
本次技术博客围绕Matlab Simulink七自由度车辆模型进行了深入的分析和探讨。该模型基于先进的仿真技术,可以模拟车辆在不同路面条件下的动力学行为。通过参数可调、灵活性和可扩展性等特点,该模型可以为工程师和研究人员提供全面的仿真分析工具。在实际应用中,该模型具有广泛的前景,将为提高汽车性能和安全性提供有力支持。
matlab/simulink七自由度车辆模型,悬架具有主动控制力的七自由度整车模型。
输入为路面不平度,输出车轮位置,车身位移,俯仰角,侧倾角等。
参数可调。
需要matlab2016a及以上版本。
























 1104
1104

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









