






前言
记得刚入社会初期我是做机器人软件系统的,那段时间给我这辈子留下了很深很深的回忆,毕竟当时机器人民营化不是很火,当时它的商业化还不是很广泛,不像Android的开源,一些技术根本找不到,所以那段时间一些资料都能让我欣喜若狂,最后在那家公司也算是做出了些成绩,但是在当时情况下一方面考虑到后期发展的原因,另一方面机器人在当时市场上的份额不算高,做的公司也不多,便没继续做机器人,现在不做机器人了,但是那段时间的技术积累以及通过一些渠道获得的资料我都还保留着。为了给后人留个方便,这些资料也不能在我这沉睡,我在此便把他分享给后来人吧。希望能对大家有帮助。
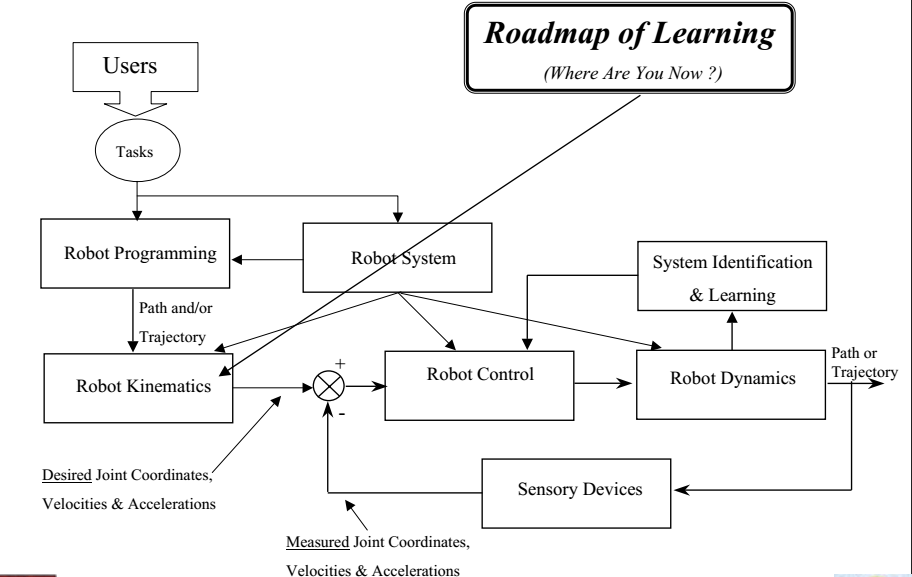
学习路线图
章节内容
一、机器人运动学
1.1 刚体运动的基础
1.2 正向运动学
1.2.1 测量工具的姿势
1.2.1.1 Denavit-Hartenberg的表示
1.2.1.2 Active-Link的表示
1.2.2 测量工具的速度
1.3 逆向运动学
1.3.1联合变量的确定
1.3.1 联合速度的测定
课程一
1.描述一个运动的先决条件是什么?
所有的运动都是相对的:
(1)空间参考系统(位置,方向)
(2)时钟系统(时间,速度,加速度)
可以描述的位置,方向,速度和加速度
2.如何定义一个参考系?
(1)定义一个原点:
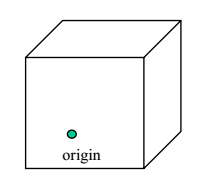
(2)定义一个由三个基向量组成的框架(单位向量)
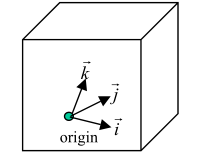
(3)使三个基向量正交:
3.粒子运动分析
(1)空间坐标中粒子的位置:
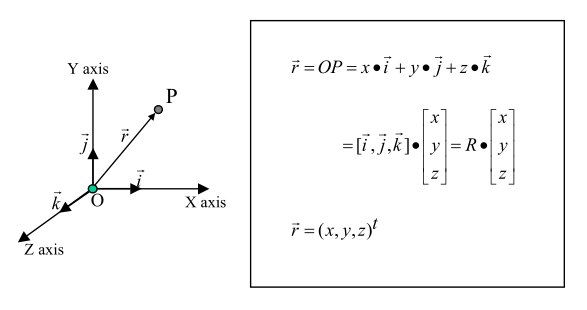
(2)粒子帧分配:
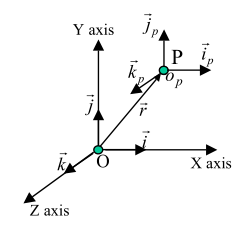
粒子的运动 = 粒子帧运动
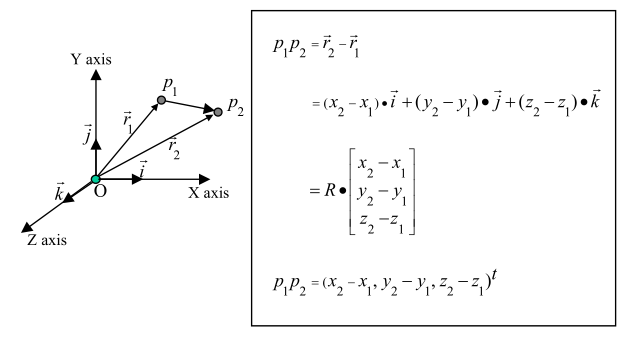
(3)粒子的位移:
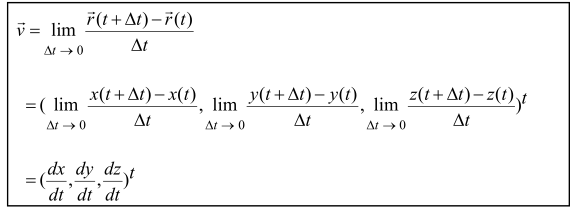
(4)粒子的线速度:
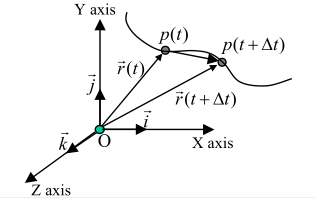
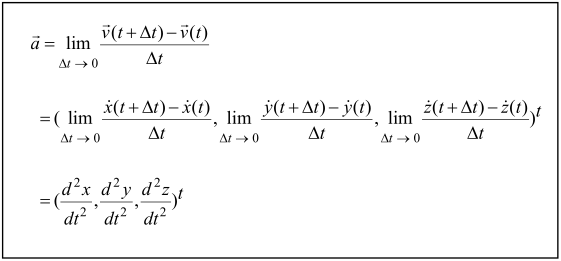
(5)粒子的线性加速度:
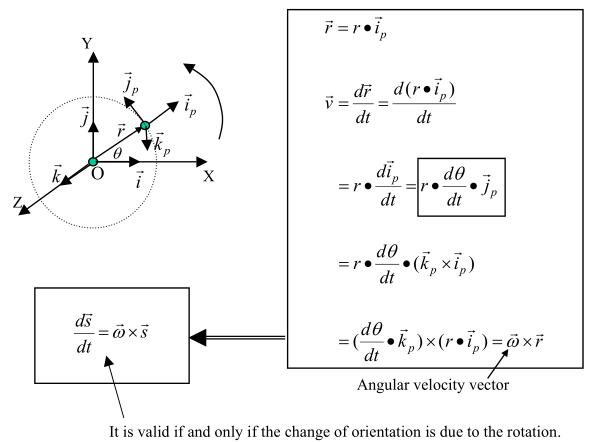
(6)粒子的圆周速度:
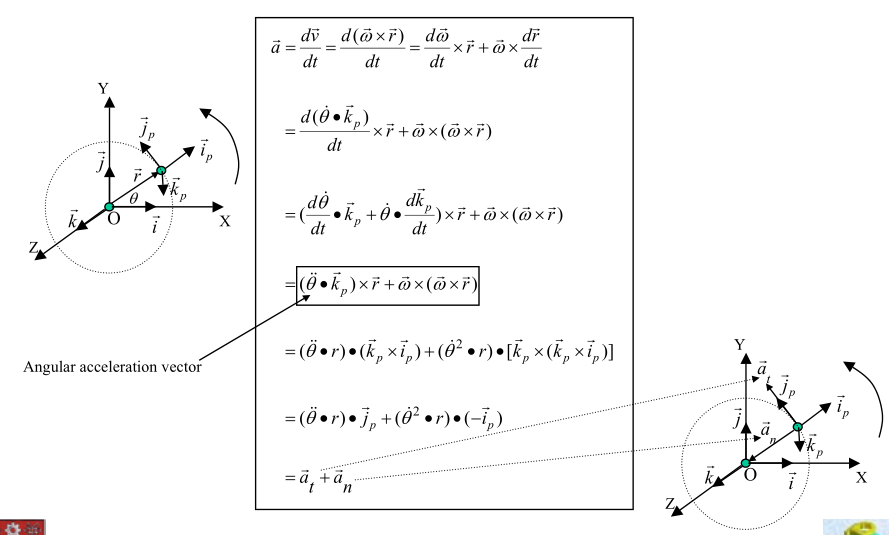
(7)粒子的圆周加速度:
结尾
本节知识点都是些运动学的基础知识,下节我会把刚体的运动分析(Motion Analysis of Rigid Body)带给大家。















 2330
2330

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









