






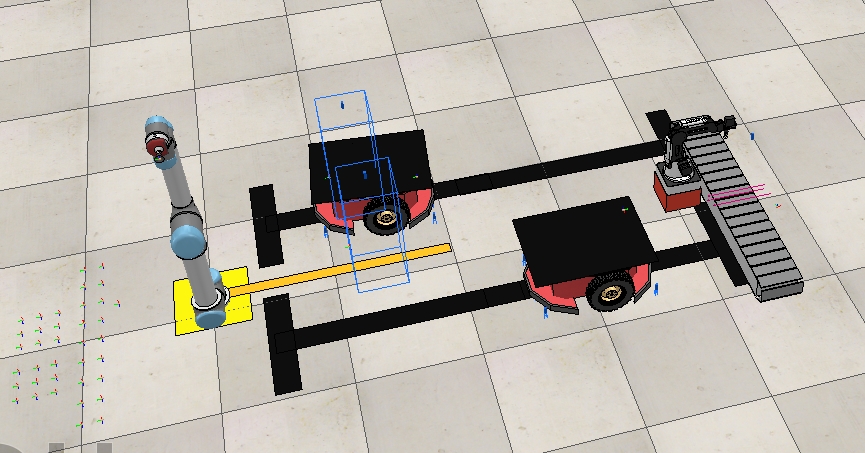
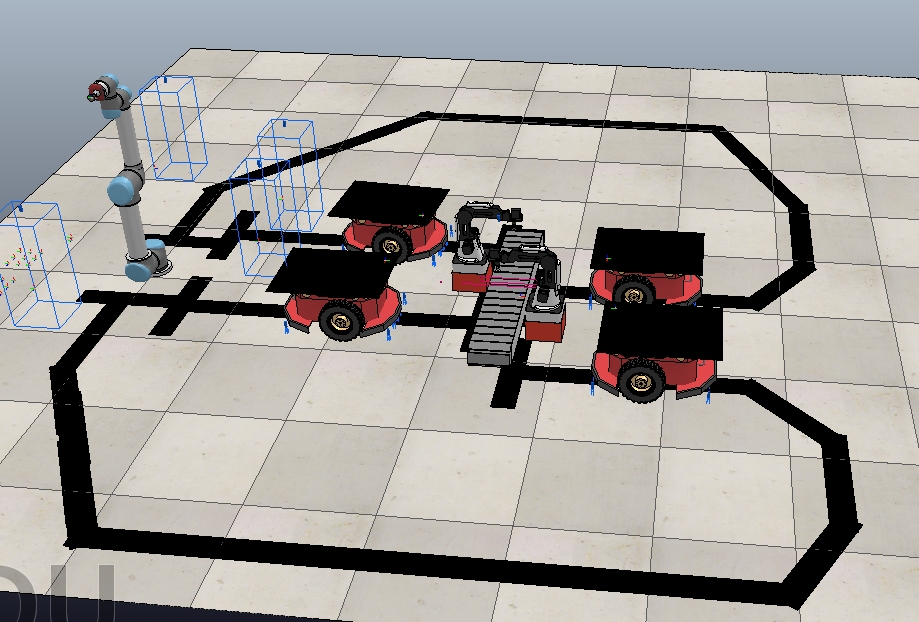
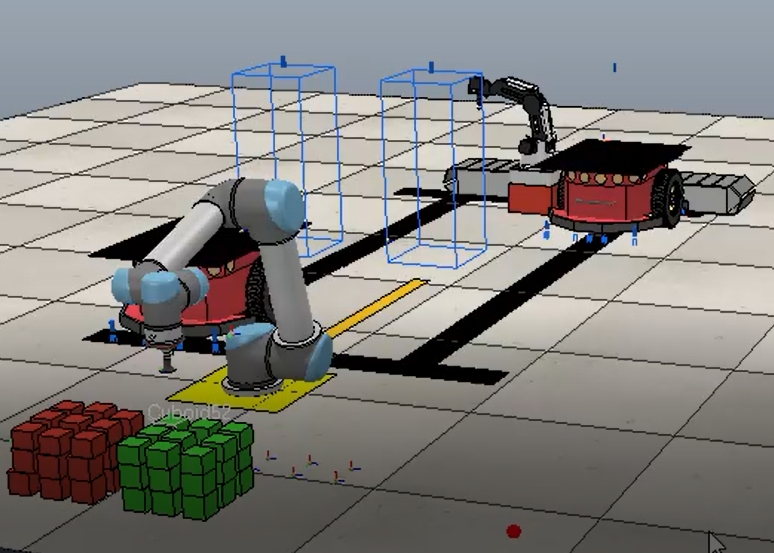
Coppeliasim仿真,vrep仿真,有分拣机器人,寻迹小车,码垛机器人,履带随机产生物块,区分高低颜色进行码垛,矮的放在最高层。
带仿真视频,报告书,ppt。
ID:6699674262869732
用户_24677194
Coppeliasim仿真是一种功能强大的虚拟仿真平台,广泛应用于机器人领域。它能够精确地模拟各种机器人的行为和环境,并提供丰富的工具和功能,帮助开发人员进行机器人系统的设计、测试和优化。
在Coppeliasim仿真平台中,可以轻松构建各种机器人系统的模型,并在虚拟环境中进行仿真实验。例如,在分拣机器人领域,我们可以建立一个包含多个分拣机器人和传送带的场景,并模拟物品的分拣过程。通过调整机器人的算法和参数,我们可以评估不同分拣策略的效果,并优化系统性能。
另一个常见的应用是寻迹小车。在Coppeliasim仿真平台中,我们可以创建一个包含寻迹小车和环境的模型,并模拟小车在不同路面条件下的行为。通过仿真实验,我们可以研究不同传感器和控制算法对寻迹性能的影响,为实际应用中的寻迹小车设计提供参考。
码垛机器人是一种用于将物品按照特定规则码放在指定位置的机器人。在Coppeliasim仿真平台中,我们可以建立一个包含码垛机器人和待码垛物块的场景,并模拟码垛过程。为了增加仿真的难度和真实性,我们可以使用随机生成物块的功能,模拟物品的不确定性和多样性。同时,我们还可以给物块着色,使得机器人能够区分高低颜色,按照规定的层次进行码垛。
通过Coppeliasim仿真平台,我们可以获得丰富的数据和结果,帮助我们评估不同算法和参数对机器人系统性能的影响。此外,Coppeliasim还支持生成仿真视频、报告书和PPT,方便我们将仿真结果进行可视化展示和分享。
总结起来,Coppeliasim仿真平台是一款功能强大、易于使用的虚拟仿真工具,广泛应用于机器人系统的设计和优化。通过在Coppeliasim中建立机器人模型,并进行仿真实验,我们可以评估不同算法和参数的效果,提升机器人系统的性能。同时,Coppeliasim还提供了生成仿真视频、报告书和PPT的功能,方便我们将仿真结果进行展示和分享。在未来的发展中,Coppeliasim将继续为机器人领域的研究和应用提供强大的支持和创新。
以上相关代码,程序地址:http://wekup.cn/674262869732.html















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









