






博主使用YOLOv8在自制数据集上取得了不错的效果,考虑到后期的安排,需要在完成目标检测后完成目标追踪功能。因此在本篇博文中主要介绍结合YOLOv8实现目标追踪。
项目源码:
https://github.com/mikel-brostrom/yolov8_tracking
接下来便是调试过程,博主依旧使用的是远程服务器来运行项目。
环境部署
老生常谈,首先便是创建环境了
conda create -n tracking python=3.8
随后使用Pycharm连接服务器并将源码上传至服务器,这里可以选择使用服务器直接在github上下载。直接在命令行中输入下面命令即可。
这里博主还是推荐使用Pycahrm来进行上传,这样可以保证你本地的与服务器上的代码完全是一致的。
git clone --recurse-submodules https://github.com/mikel-brostrom/yolov8_tracking.git
下载成功如下图:

随后使用Pycharm连接下服务器上的cuda环境,并配置地址映射。
这里就不一一赘述了,有需要的可以参考博主的这篇博文:
随后我们切换到yolov8_tracking文件夹下,并激活conda环境,并执行按照依赖命令
cd yolov8_tracking #切换目录,这个目录名自己起
source activate tracking #激活环境
pip install -r requirements.txt #安装依赖
此外使用git命令时会将在yolov8文件夹内自动下载好我们的yolov8项目源码而不需要我们自己再去上传。
完成上面的配置后,我们运行该项目中的track.py文件
它会自动帮我们下载需要的权重文件,这个过程可能比较长,可以耐心的等待,当然博主推荐我们自己手动下载。

随后我们将下载好的权重文件放到指定位置后,我们再次运行track.py
报错:
qt.qpa.xcb: could not connect to display
qt.qpa.plugin: Could not load the Qt platform plugin “xcb” in “/home/ubuntu/.conda/envs/tracking/lib/python3.8/site-packages/cv2/qt/plugins” even though it was found.
This application failed to start because no Qt platform plugin could be initialized. Reinstalling the application may fix this problem.
先前博主就曾被这个困扰过,这是什么问题呢,我们都知道平时我们在本地运行时,为了方便实时观测数据变化,会使用plt作图来展示,而我们在使用pycharm时与服务器连接,他的图像无法回传到本地从而无法显示进而中断,如何解决呢?两种方法,第一是修改代码,可以将我们的变化图不再显示而是保存起来,等运行完成后观看即可,还有就是安装其提示:
qt.qpa.xcb: could not connect to display 10.0
我们修改下让其找到即可:在
Run-Edit Configurations, 在Environment variable添加
DISPLAY=localhost:10.0
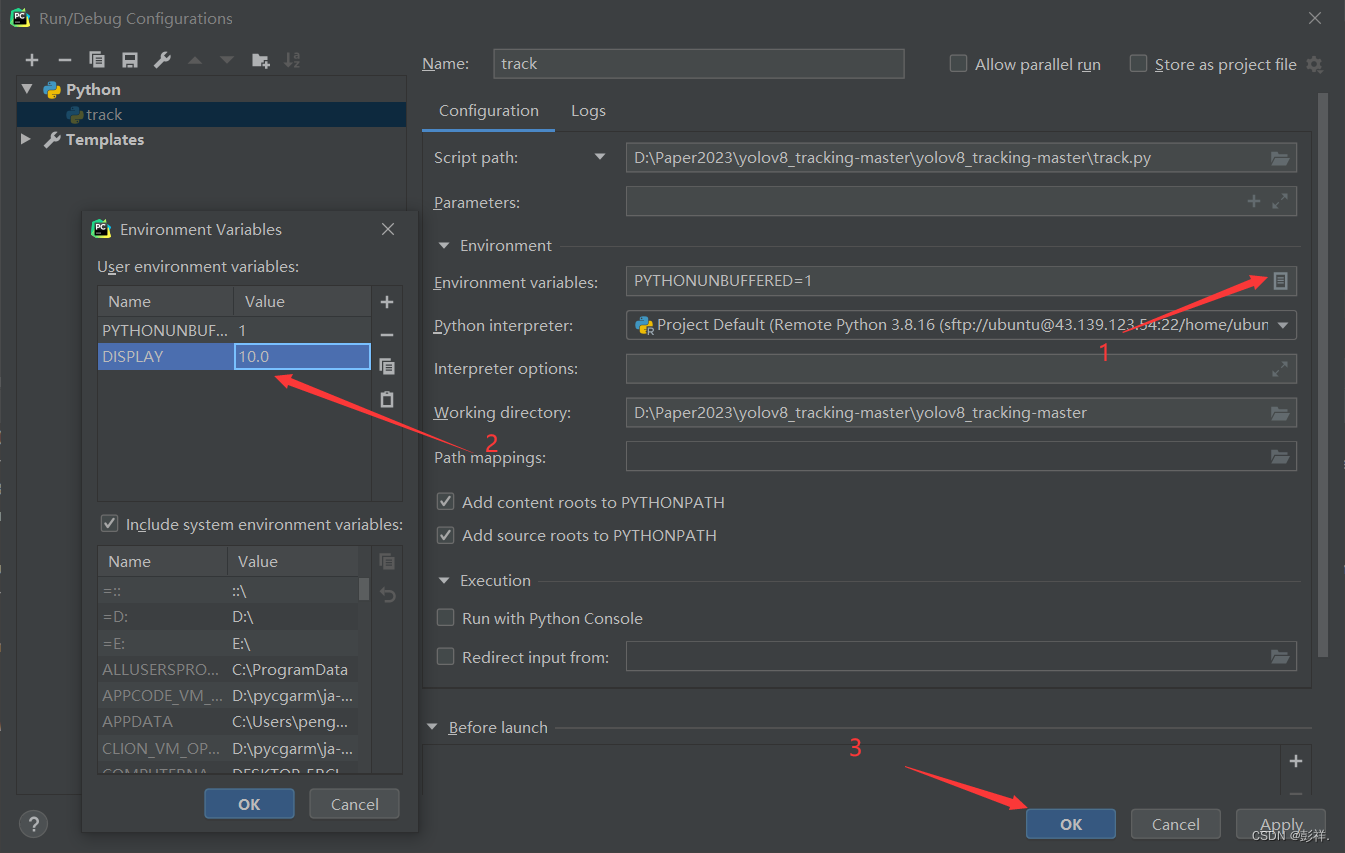
完成后:

再次运行,该错误消失,报其他错误了,哈哈哈哈,呜呜呜
global obsensor_uvc_stream_channel.cpp:156 getStreamChannelGroup Camera index out of range
盲猜是由于远程服务器导致无法调用摄像头导致的,好吧,就先不考虑这个问题了,先使用本地环境跑吧。
切换回本地环境 python38
再次运行,摄像头成功调用。
然后又报错:
import lap
ModuleNotFoundError: No module named ‘lap’
原本以为使用pip安装一下就可以的,但却失败了,后来看到有人提到要使用该命令:
conda install -c conda-forge lap
OK了,今天就到这吧。
















 5115
5115











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











