







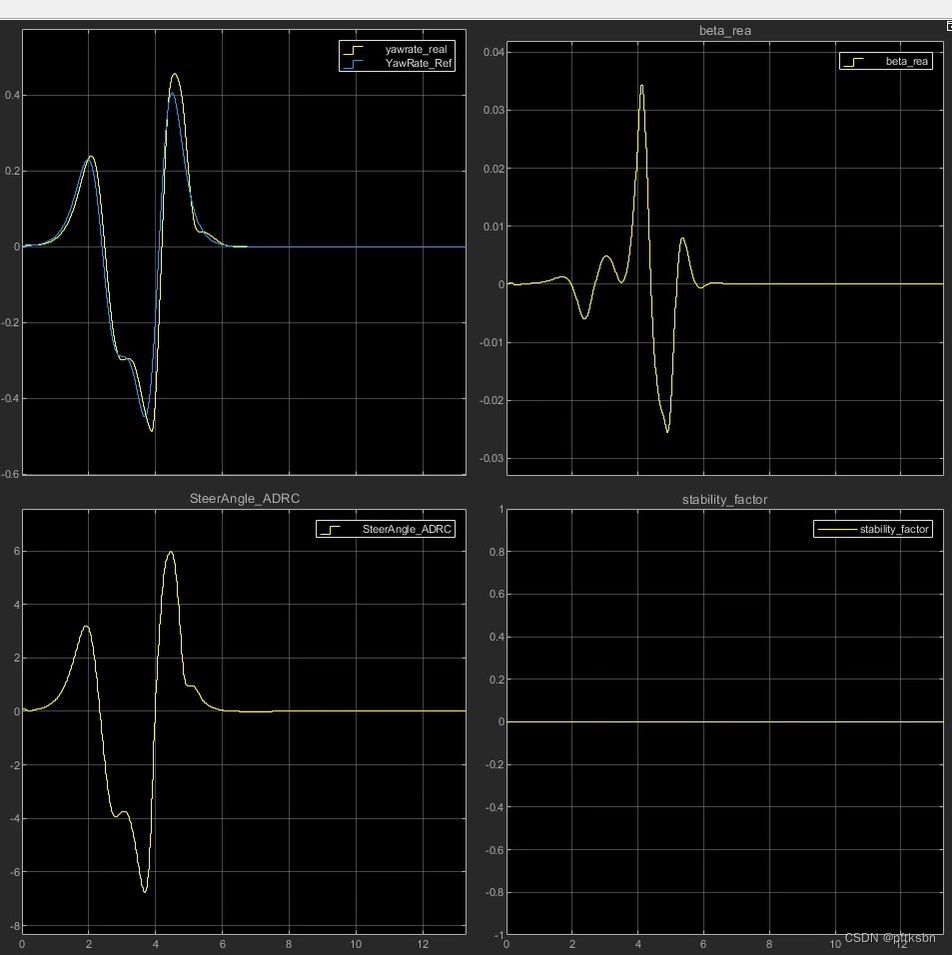
基于LQR最优控制算法实现的轨迹跟踪控制,建立了基于车辆的质心侧偏角、横摆角速度,横向误差,航向误差四自由度动力学模型作为控制模型,通过最优化航向误差和横向误差,实时计算最优的K值,计算期望的前轮转角实现轨迹跟踪,仿真效果良好,有对应的资料,包运行和。
YID:75150709284185618
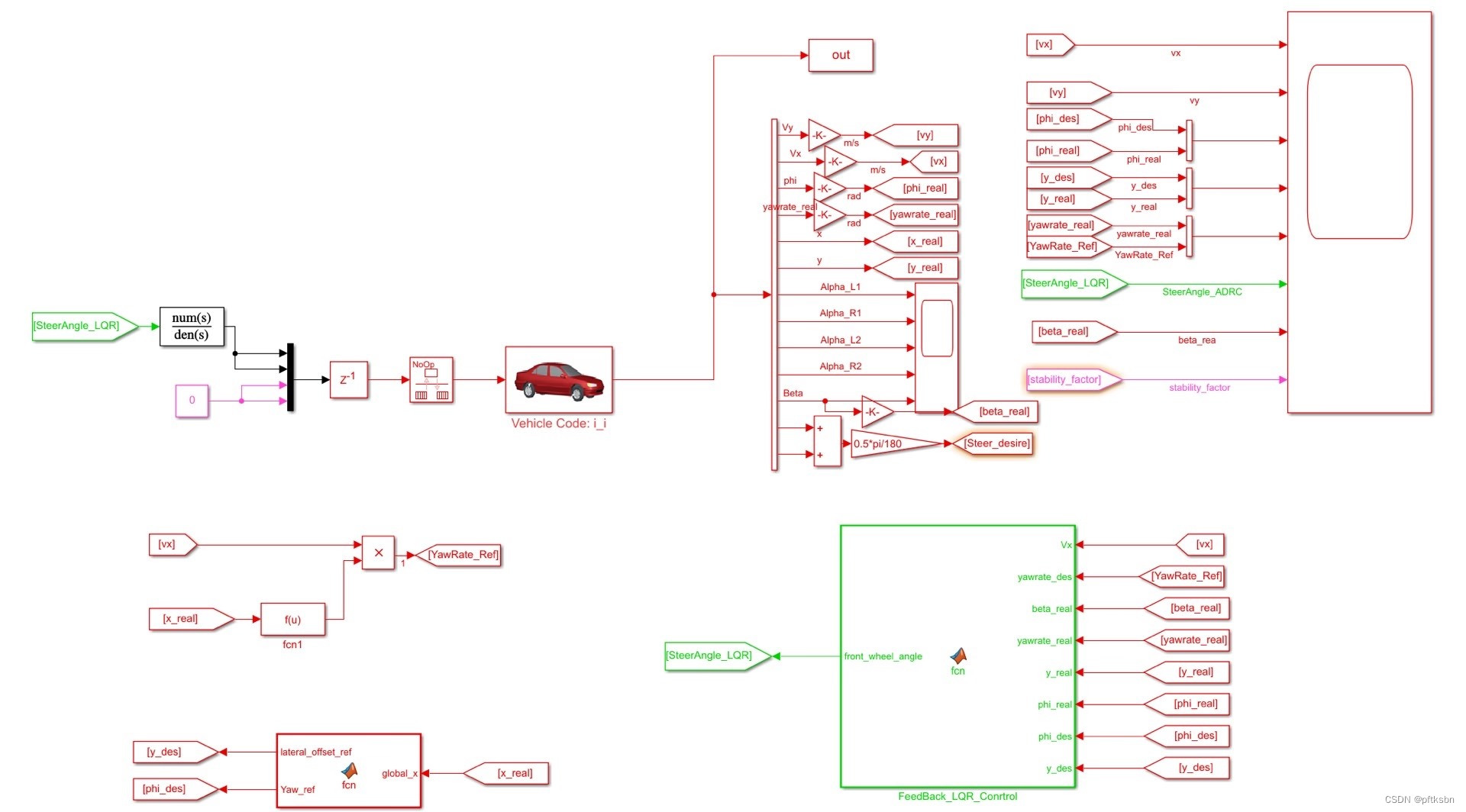
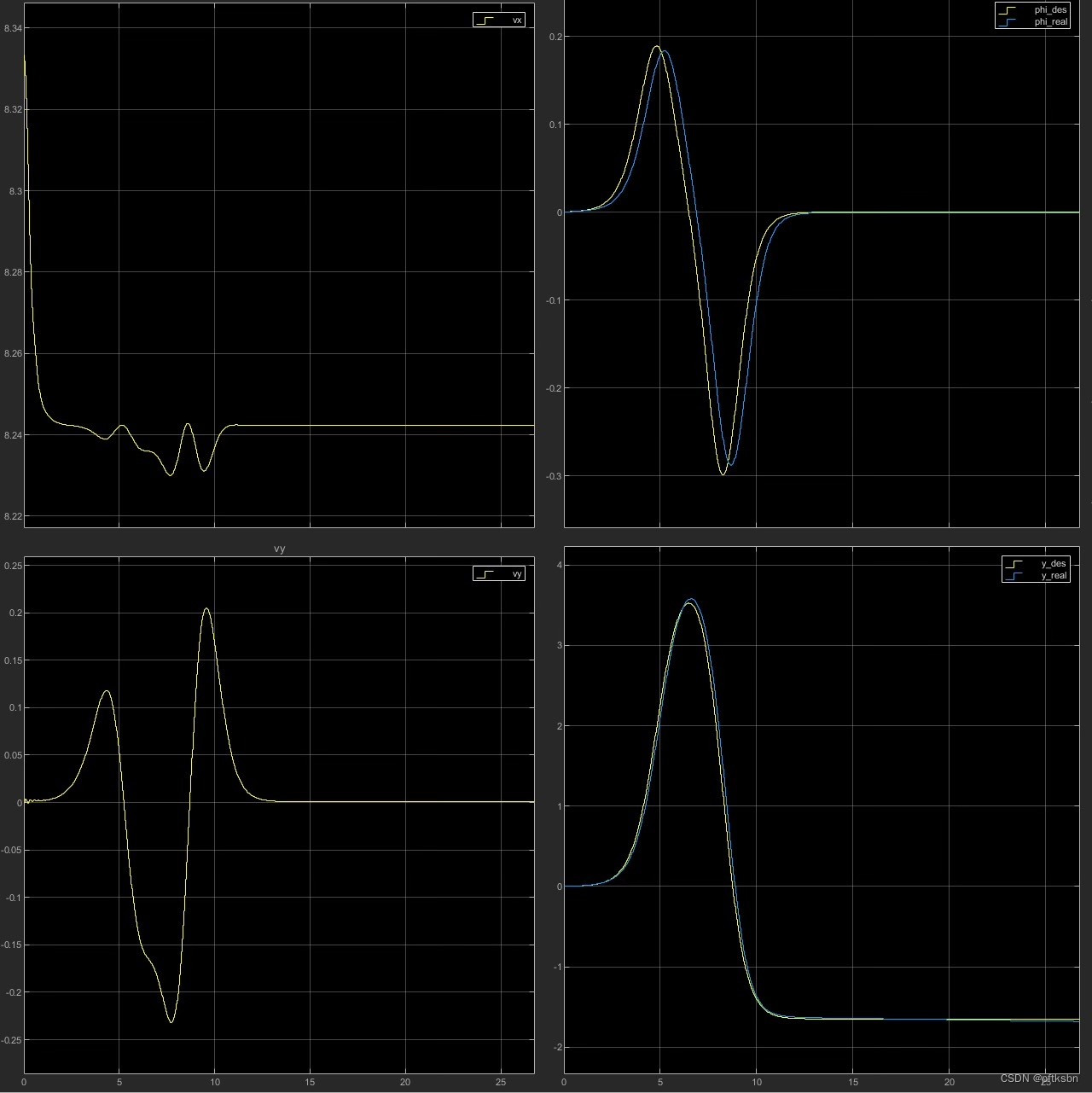
基于LQR最优控制算法实现的轨迹跟踪控制技术
引言
随着汽车工业的发展,车辆的驾驶稳定性和行驶安全性成为了关注的热点问题。针对这些问题,车辆轨迹跟踪控制技术逐渐被广泛应用。而LQR最优控制算法作为一种高效的控制算法,在车辆轨迹跟踪控制中也得到了广泛应用。本文将通过建立基于车辆的质心侧偏角、横摆角速度,横向误差,航向误差四自由度动力学模型作为控制模型,并通过最优化航向误差和横向误差&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1245
1245











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









