







参考书籍:(找不到资源可以后台私信我)
《深度学习入门:基于Python的理论与实现 (斋藤康毅)》
《Hands-On Machine Learning with Scikit-Learn, Keras, and TensorFlow, 2nd Edition (Aurelien Geron [Géron, Aurélien])》
神经网络正向传播进行的运算在几何学中称为“仿射变换”,即一次线性变换和一次平移,对应的就是加权和与加偏置运算。
在神经网络中,正向传播(forward propagation)是指输入数据通过网络中的每一层,最终产生输出的过程。反向传播(back propagation)是指在网络训练中,通过计算损失函数对网络参数进行更新的过程。
正向时可以通过数值微分计算梯度,反向时直接用链式法则求梯度。前者实现简单,一般不容易出错,但是会慢;后者实现复杂,但是快。可以通过计算两者之差是否够小确认计算是否正确。(梯度确认,gradient check)
反向传播
- 每次处理一小批数据(mini-batch,比如32个),但是会处理全部训练数据很多次。跑完一遍全部数据称为一个epoch。
- 正向过程(forward pass)类似预测,就在每层进行计算,然后传递结果到上一层。中间结果需要保留。
- 计算输出错误(比如用损失函数),并计算每个输出对错误的贡献(error gradients)。继续往下计算,直到达到输入层,这就是反向过程(backward pass)。计算时使用链式法则。
- 最后使用梯度下降调节所有权重
- 最开始隐藏层的权重应该是随机的
参数更新
神经网络的学习是为了找到使损失函数值尽可能小的参数,解决这个问题的过程称为最优化(optimization)
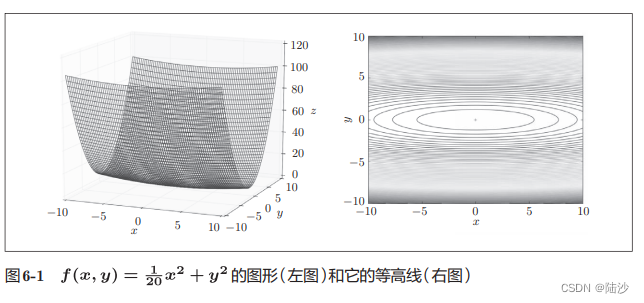
为什么SGD会低效?因为梯度的方向并不一定指向最小值方向(所以SGD会沿z形下降),比如函数的形状是非均向(anisotropic),如
Momentum(动量)
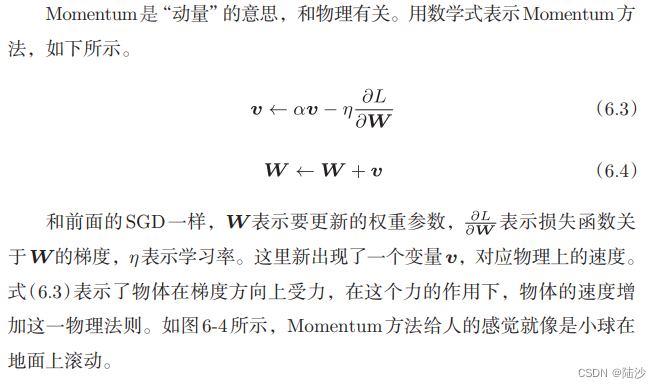
αv指在不受任何力的时候,物体要逐渐减速(摩擦、空气阻力等原因)。α可能设为0.9之类的值。
momentum的更新路径像小球在碗中滚动,因为虽然x轴受力小,但是一直在受力,所以会向一个方向加速;虽然y轴上受力大,但是会交互地受到正向和反向的力,会抵消,所以会更快向x轴靠近。
AdaGrad
学习的时候为参数的每个元素适当地调整学习率。Ada指Adaptive
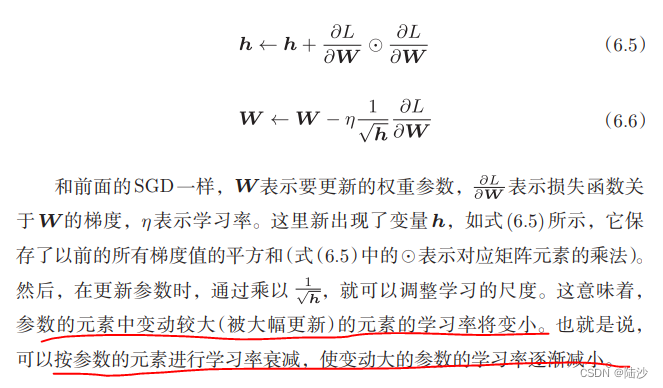
随着学习的深入,更新的幅度会变小。如果无止境地学习,更新量就会变成0,改善的方法之一是使用RMSProp,其思路是逐渐“遗忘”过去的梯度,在做加法运算时将新梯度的信息更多地反映出来。
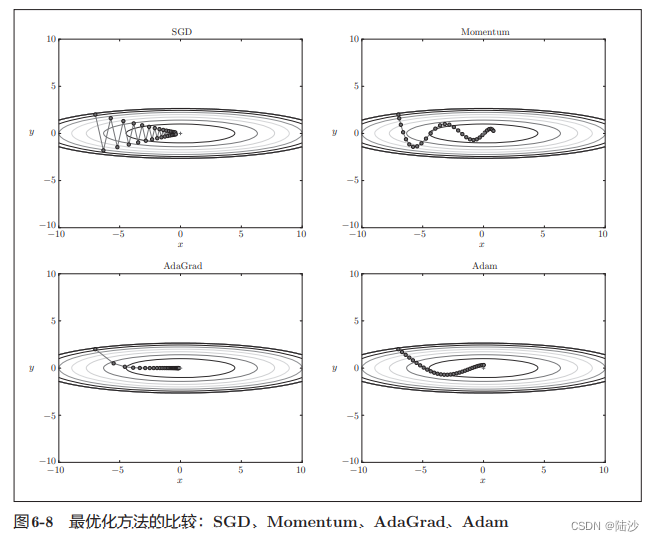
Adam
融合了Momentum和AdaGrad的优点,并进行超参数的“偏置校正”。其更新过程也类似小球在碗中滚动,但是左右摇晃的程度会减轻一点(因为AdaGrad)。
每种方法都有擅长解决的问题类型。但总体来说,这三种比SGD学习得更快,有时候识别精度也会更高。
权重的初始值
权重的初始值应该是随机产生的、不同的值。
梯度消失是指在神经网络训练过程中,某些层的梯度变得非常小,甚至趋近于零,导致这些层无法更新参数。这会导致模型无法收敛,训练过程变得非常缓慢,甚至完全停滞不前。
梯度消失通常发生在深度神经网络中,特别是在使用传统的激活函数(如 sigmoid 函数)时。这是因为这些激活函数的导数在输入很大或很小的时候会趋近于零,从而导致梯度变得非常小。为了解决这个问题,研究者们提出了一系列的解决方案,包括使用更加稳定的激活函数(如 ReLU 函数)、使用批量归一化(Batch Normalization)、使用残差连接(Residual Connection)等。
权重初始值可以采用Xavier初始值。(一般深度学习框架已经纳入为标准)。Xavier就是如果前一层节点数为n,则应该使用标准差为1/sqrt(n)的高斯分布初始化权重(这是Caffe等框架中的做法,原始论文中还考虑了下一层输出节点的数量)。
Xavier初始值是以激活函数为线性函数为前提推导出来的,因为sigmoid和tanh函数左右对称,且中央附近可以视作线性函数,所以可以使用Xavier初始值。
如果激活函数使用ReLU时,一般要使用He 初始值:前一层节点数为n时,使用标准差为sqrt(2 / n)的高斯分布初始化权重
Batch Normalization
优点:可以快速学习;不那么依赖初始值;抑制过拟合
思路是调整各层的激活值分布,使其拥有适当的广度。因此,需要向神经网络中插入对数据分布进行正规化的层。
具体来说,就是以进行学习时的mini-batch为单位,使数据分布的均值为0,方差为1。
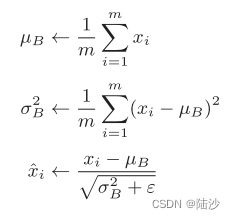
前两个公式求均值和方差,第三个公式中加入ε是为了使分母大于0,可以取值1e-7之类的。
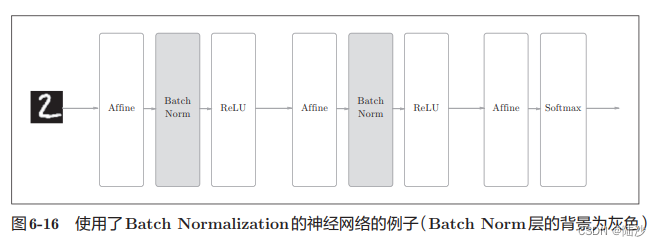
BatchNorm层插入到激活函数前面,激活函数之后再经过一个层,即yi ← γxi + β 其中γ和β的值分别为1和0,后面会通过学习调整到合适的值。
正则化
发生过拟合的原因:模型拥有大量参数、表现力强;训练数据少
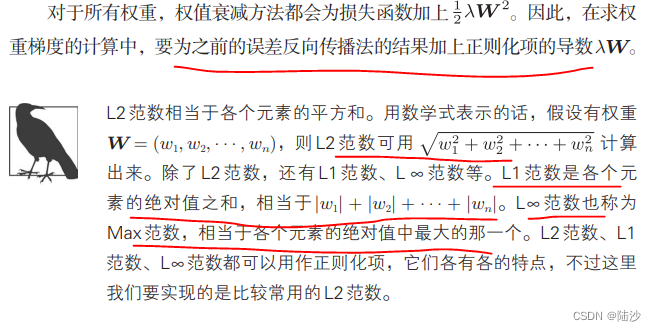
权值衰减:在学习过程中对大的权重进行惩罚,以抑制过拟合。比如可以加1/2λW*W(L2范数)到损失函数上。其中λ是控制正则强化度的超参数,越大,对权重施加的惩罚越大。用1/2是为了让求导结果变成λW
如果网络模型很复杂,只用权值衰减可能不够,一般使用dropout
class Dropout:
def __init__(self, dropout_ratio=0.5):
self.dropout_ratio = dropout_ratio
self.mask = None
#
def forward(self, x, train_flg=True):
if train_flg:
# 随机生成与x形状相同的数组,大于dropout_ratio的设为True
self.mask = np.random.rand(*x.shape) > self.dropout_ratio
return x * self.mask
else:
return x * (1.0 - self.dropout_ratio)
def backward(self, dout):
return dout * self.mask
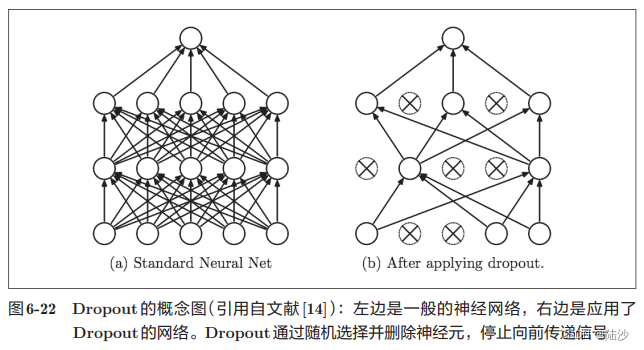
正向传播时传递了信号的神经元,反向传播时也传递信号,否则反向传播时停止。
所以训练时,每传递一次数据,就会随机删除一些神经元。测试时,虽然所有神经元都要信号传递,但对于各个神经元的输出,要乘上训练时的删除比例再输出。
机器学习中经常使用集成学习,就是让多个模型单独进行学习,推理时再取多个模型的输出的平均值。Dropout相当于模拟集成学习,因为每次随机删神经元相当于换新模型。
超参数的验证
一般用验证集评估超参数的好坏。
1.设定超参数的范围 2. 在设定范围中随机采样 3. 使用采样的超参数进行学习,设置很小的epoch,通过验证数据评估识别精度 4. 重复2和3多次(比如100次),根据识别精度缩小超参数范围
如果需要严谨的方法,可以使用贝叶斯最优化Bayesian optimization















 1219
1219











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









