






基于ESO的永磁同步电机无感FOC
1.采用线性扩张状态观测器(LESO)估计电机反电势,利用锁相环从反电势中提取位置和转速信息,从而实现无位置传感器控制;
2.提供算法对应的参考文献和仿真模型。
拿后赠送PMSM控制相关电子资料。
仿真模型纯手工搭建,不是从网络上复制得到。
仿真模型仅供学习参考
ID:4868675880656281
努力惜春华JW
标题:基于ESO的永磁同步电机无感FOC技术研究及仿真模型搭建
摘要:本文围绕永磁同步电机无位置传感器控制技术展开研究,提出了基于线性扩张状态观测器(LESO)的方法,通过利用锁相环从电机反电势中提取位置和转速信息,实现了无感FOC控制。同时,为了验证该算法的有效性,文中提供了相应的参考文献和手工搭建的仿真模型。
-
引言
永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)由于其高效、高功率密度的特点,在众多领域得到广泛应用。然而,传统的PMSM控制需要依赖位置传感器来获取转子位置信息,不仅增加了系统成本,还存在传感器失效等问题。因此,提出一种无位置传感器控制方法具有重要意义。本文将介绍一种基于线性扩张状态观测器的无感FOC技术,旨在提供一种实用的控制策略,以实现高效、可靠的PMSM控制。 -
线性扩张状态观测器(LESO)
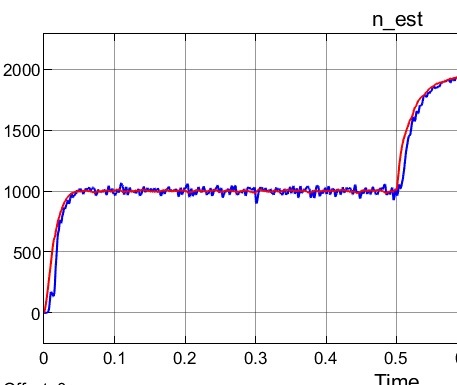
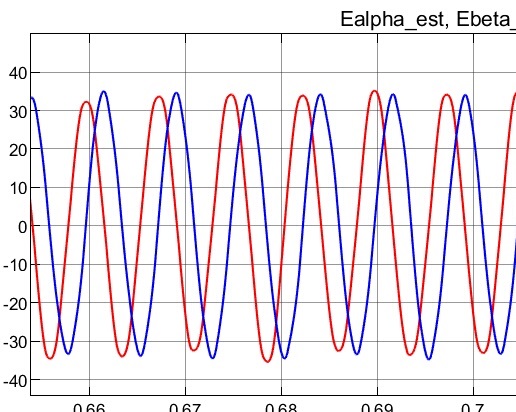
采用LESO作为反电势估计器,可以实现对电机反电势的精确估计,从而实现无位置传感器控制。LESO通过扩展状态观测器的方法,在反电势曲线上建立了一个辅助状态变量,并通过对该变量的估计,实现了对反电势的估计。同时,为了提高估计精度,本文结合了锁相环技术,从反电势中提取出位置和转速信息,为后续的控制提供准确参考。 -
无感FOC控制策略
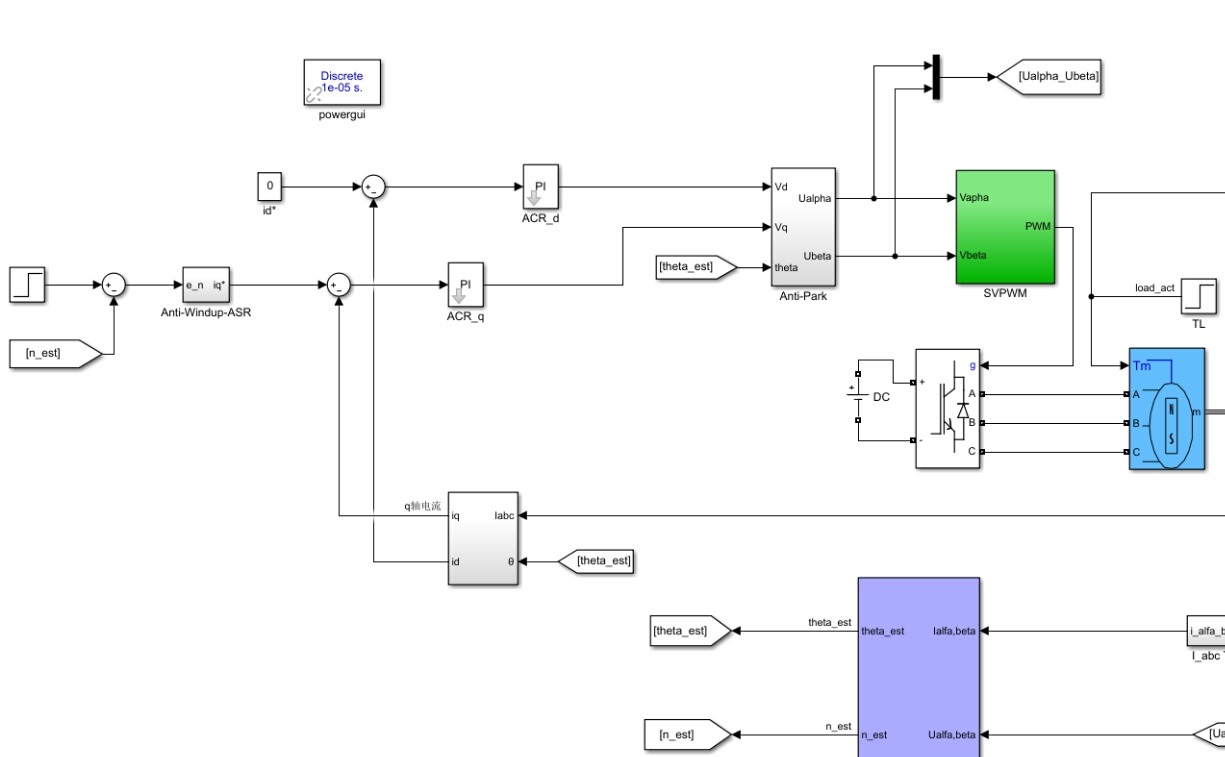
基于LESO的无感FOC控制策略分为两个主要步骤:反电势估计和电机控制。首先,通过LESO估计反电势,获取电机位置和转速信息;然后,根据这些信息,结合FOC控制策略,实现对电机的高效、精准控制。具体而言,通过对电流矢量和转矩矢量的控制,调整电机的速度和力矩输出,从而满足系统的动态和静态性能要求。 -
参考文献和仿真模型
为了验证基于LESO的无感FOC控制算法的有效性,本文提供了相关的参考文献供读者深入学习和参考。同时,为了方便读者进行仿真验证,本文提供了纯手工搭建的仿真模型,确保模型的可靠性和可行性。读者可以根据该模型进行参数调整和算法验证,以深入理解无感FOC控制策略的优势和应用场景。
结论:本文介绍了一种基于ESO的永磁同步电机无感FOC控制技术,并提供了相应的参考文献和纯手工搭建的仿真模型。通过采用线性扩张状态观测器作为反电势估计器,结合锁相环技术从反电势中提取位置和转速信息,实现了无位置传感器控制,从而实现了高效、可靠的PMSM控制。该技术在工业和汽车等领域具有重要的应用前景。
关键词:永磁同步电机;无感FOC;线性扩张状态观测器;锁相环;控制策略;仿真模型
以上相关代码,程序地址:http://coupd.cn/675880656281.html















 406
406











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









