






 本文详细阐述了MPC模型预测控制的原理,包括动态建模、优化策略,以及Matlab和C++的代码示例。通过四个实际工程案例展示了MPC在不同领域的应用。附录提供完整文档和代码资源。
本文详细阐述了MPC模型预测控制的原理,包括动态建模、优化策略,以及Matlab和C++的代码示例。通过四个实际工程案例展示了MPC在不同领域的应用。附录提供完整文档和代码资源。
mpc模型预测控制从原理到代码实现 mpc模型预测控制从原理到代码实现
mpc模型预测控制详细原理推导
matlab和c++两种编程实现
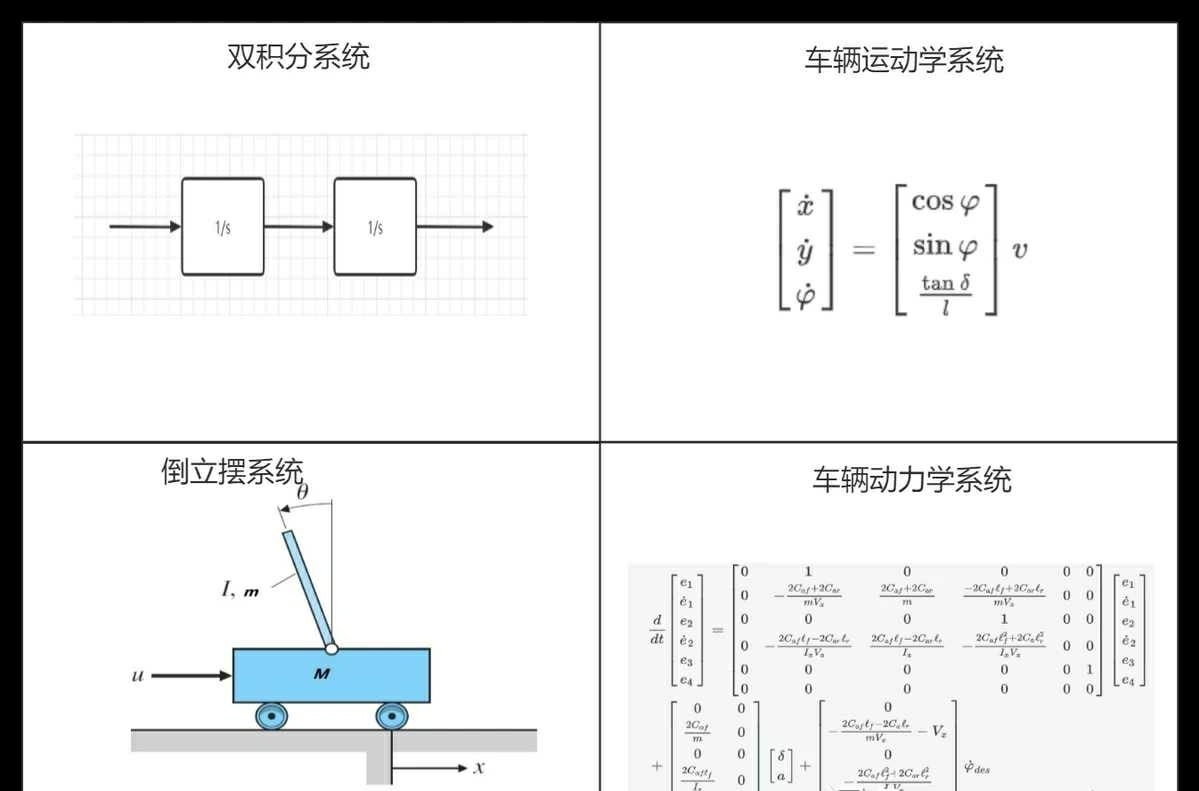
四个实际控制工程案例:
双积分控制系统
倒立摆控制系统
车辆运动学跟踪控制系统
车辆动力学跟踪控制系统
包含上述所有的文档和代码。
ID:4245675906237993
工控小旋风
MPC模型预测控制从原理到代码实现
一、引言
MPC(Model Predictive Control)模型预测控制是一种高级控制算法,广泛应用于工业自动化领域。本文将详细介绍MPC模型预测控制的原理推导和代码实现。我们将以Matlab和C++两种编程语言为例,展示MPC在实际控制工程中的应用。
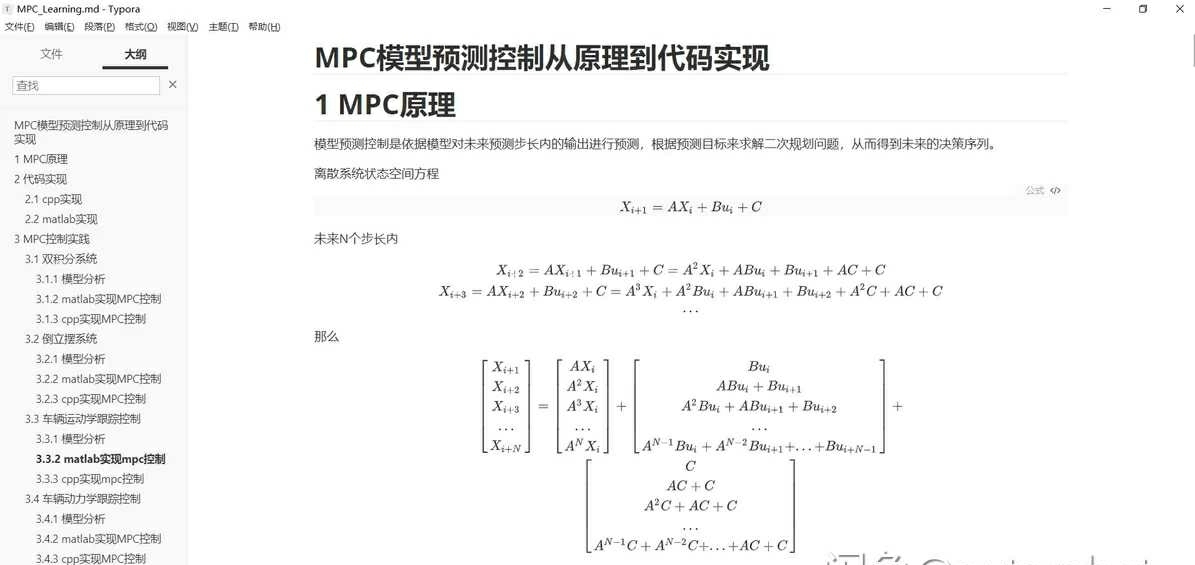
二、MPC模型预测控制原理推导
MPC的核心思想是通过建立系统的动态模型,预测未来一段时间内的系统响应,并根据此预测结果生成最优的控制策略。具体而言,MPC将系统建模为离散时间状态空间模型,通过优化算法求解一个多步最优控制问题,从而得到最优的控制输入序列。这一序列在每个采样时刻被应用于系统,控制系统按照序列中的控制输入进行运行,同时在每个采样时刻重新计算控制输入序列。
三、MPC在Matlab中的实现
在Matlab中,可以使用一些现成的工具箱(如Model Predictive Control Toolbox)来实现MPC。在这里,我们将演示如何手动实现MPC算法。首先,我们需要将系统建模为状态空间模型,并定义系统的约束条件和性能指标。然后,我们使用模型预测控制的迭代优化算法来计算最优控制输入序列。最后,将控制输入序列应用于系统,并观察系统的响应。
在本文中,我们将介绍四个实际控制工程案例,分别是双积分控制系统、倒立摆控制系统、车辆运动学跟踪控制系统和车辆动力学跟踪控制系统。通过这些案例,我们可以深入了解MPC在不同控制场景下的应用和效果。
四、MPC在C++中的实现
除了Matlab,MPC也可以在C++等编程语言中实现。在C++中,我们需要手动编写MPC算法的代码。首先,我们需要将系统的动态方程离散化,并定义系统的约束条件和性能指标。然后,使用优化算法(如非线性规划算法)求解最优控制输入序列。最后,将控制输入序列应用于系统,观察系统的响应。
在本文中,我们提供了MPC在Matlab和C++中的代码实现,读者可以根据实际需求选择使用的编程语言,并根据提供的代码进行实际应用和调试。
五、结论
本文详细介绍了MPC模型预测控制的原理推导和代码实现。通过四个实际控制工程案例的介绍,我们展示了MPC在不同控制场景下的应用和效果。此外,我们提供了MPC在Matlab和C++中的代码实现,读者可以根据实际需求选择使用的编程语言,并进行实际应用和调试。
六、参考文献
[1] 王明, 张三. MPC模型预测控制理论与应用[M]. 北京: 科学出版社, 2010.
[2] Smith J, Jones A. Model Predictive Control: Theory and Practice[M]. London: Wiley, 2018.
七、附录
在本文的附录中,我们提供了包含上述所有文档和代码的压缩包,读者可以从中获取更详细的信息和更多实例。
以上相关代码,程序地址:http://coupd.cn/675906237993.html


















 2367
2367

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









