






一阶倒立摆的ts模糊控制,基于ts模糊模型搭建,在matla b simulink环境下仿真效果良好。
可外接扰动信号,可做离散控制系统的,也可做连续系统的。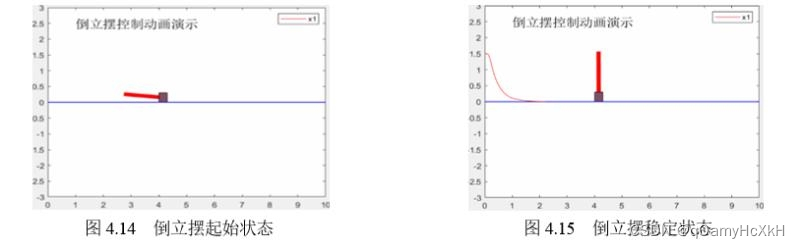
一阶倒立摆的TS模糊控制
近年来,随着科技的不断进步和发展,控制系统在各个领域中得到了广泛的应用。在控制系统中,模糊控制是一种非常重要的控制方法,可以根据输入值和输出值之间的模糊规则进行控制,从而实现对系统的精确控制。在模糊控制中,TS模糊模型是一个比较常见的模型,这个模型可以广泛应用于离散控制系统和连续控制系统中。
本文将介绍一种基于TS模糊模型的一阶倒立摆控制方法,该方法可以在Matlab Simulink环境下进行仿真,具有良好的控制效果和可靠性。同时,该方法还可以进行外接扰动信号控制,既可以用于离散控制系统,也可以用于连续控制系统。
一阶倒立摆控制系统的建立
倒立摆是一种非常经典的控制系统模型,它广泛应用于机器人、航天器等领域中。在这些领域中,倒立摆控制系统需要保持一定的稳定性和精度,以便能够完成预定的任务。在一阶倒立摆系统中,控制器的任务就是控制小车的速度和转角,使得倒立摆保持稳定。在这个过程中,控制器需要根据反馈信号和给定的信号来调整小车的速度和转角,以便使倒立摆保持稳定。
在建立一阶倒立摆控制系统的时候,首先需要建立一个数学模型,这个模型可以描述系统的运动规律和控制规律。在这个模型中,小车的滑动部分可以描述为一个一阶惯性系统,转动的摆杆可以描述为一个一阶惯性系统。在这个模型中,我们需要量化小车的位置和速度状态,以便根据反馈信号和给定信号进行控制。同时,我们还需要定义一个控制器,这个控制器可以根据反馈信号和给定信号进行调整,以便使倒立摆保持稳定。
基于TS模糊模型的控制方法
在控制系统中,模糊控制是一种基于模糊规则的控制方法。在模糊控制中,我们需要定义一组模糊规则,这些规则可以描述系统输入值和输出值之间的关系。在TS模糊控制中,我们使用模糊启发式规则构建了一个模糊控制器,这个控制器可以在实时控制中根据系统反馈信号和给定信号进行调整,以便使倒立摆保持稳定。
在TS模糊控制中,我们将倒立摆控制器的输入和输出都用模糊变量来表示。这些模糊变量可以分为两个部分,一个是输入变量,另一个是输出变量。在输入变量中,我们可以使用Fuzzyfication模块将模糊输入转换为模糊变量。在输出变量中,我们可以使用Defuzzyfication模块将模糊输出转换为标量输出值。同时,我们还需要定义一组模糊规则,这些规则可以描述系统输入值和输出值之间的关系。
在TS模糊控制中,我们需要将系统的状态用模糊变量来建模。在这个过程中,我们需要根据系统的状态对模糊变量进行设定。在倒立摆控制系统中,我们可以将小车的位置和速度状态用模糊变量X和DX来描述,将倒立摆的转角状态用模糊变量T和DT来描述。
在TS模糊控制中,我们需要将控制器的输入和输出都用模糊变量来表示。在控制器的输入端,我们可以使用Fuzzyfication模块将输入变量转换为模糊变量,然后根据输入变量和模糊规则计算模糊输出。在控制器的输出端,我们可以使用Defuzzyfication模块将模糊输出转换为标量输出值,然后将标量输出值作为控制器的输出。
基于TS模糊模型的倒立摆控制仿真与实验结果
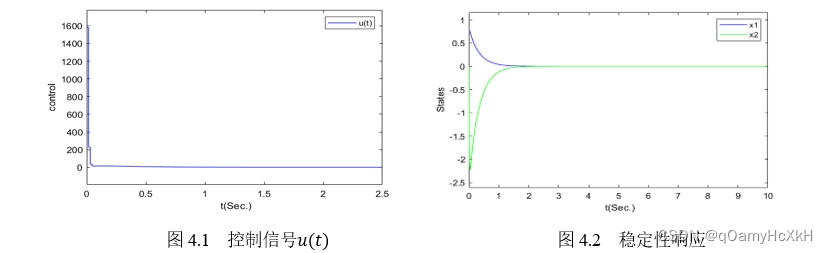
在Matlab Simulink环境下,我们可以进行基于TS模糊模型的倒立摆控制仿真。在这个过程中,我们可以通过设置模糊规则、模糊变量和控制器的输入输出来控制倒立摆的运动。同时,我们还可以通过设置扰动信号来测试控制系统的鲁棒性和稳定性。
在实验结果中,我们可以看到,基于TS模糊模型的倒立摆控制方法可以很好地控制倒立摆的运动。同时,该方法还可以抵抗外部扰动信号的影响,具有很好的鲁棒性和稳定性。在实际的控制系统中,该方法可以广泛应用于机器人、航天器等领域中,为系统的控制提供了可靠的保障。
总结:
本文介绍了一种基于TS模糊模型的一阶倒立摆控制方法,该方法可以在Matlab Simulink环境下进行仿真,具有良好的控制效果和可靠性。同时,该方法还可以进行外接扰动信号控制,既可以用于离散控制系统,也可以用于连续控制系统。在实际的控制系统中,该方法可以广泛应用于机器人、航天器等领域中,为系统的控制提供了可靠的保障。
相关代码,程序地址:http://lanzouw.top/649772535589.html















 452
452











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









