






无人驾驶模型预测控制第五章代码,已经对代码进行了重大修改,可以跑通。
另外加入了侧偏角软约束,实现了更优的控制。
提供算法推导对应的材料。
软件版本carsim8.2和matlab2016b。
ID:6810615209474756
tbNick_1pmnj
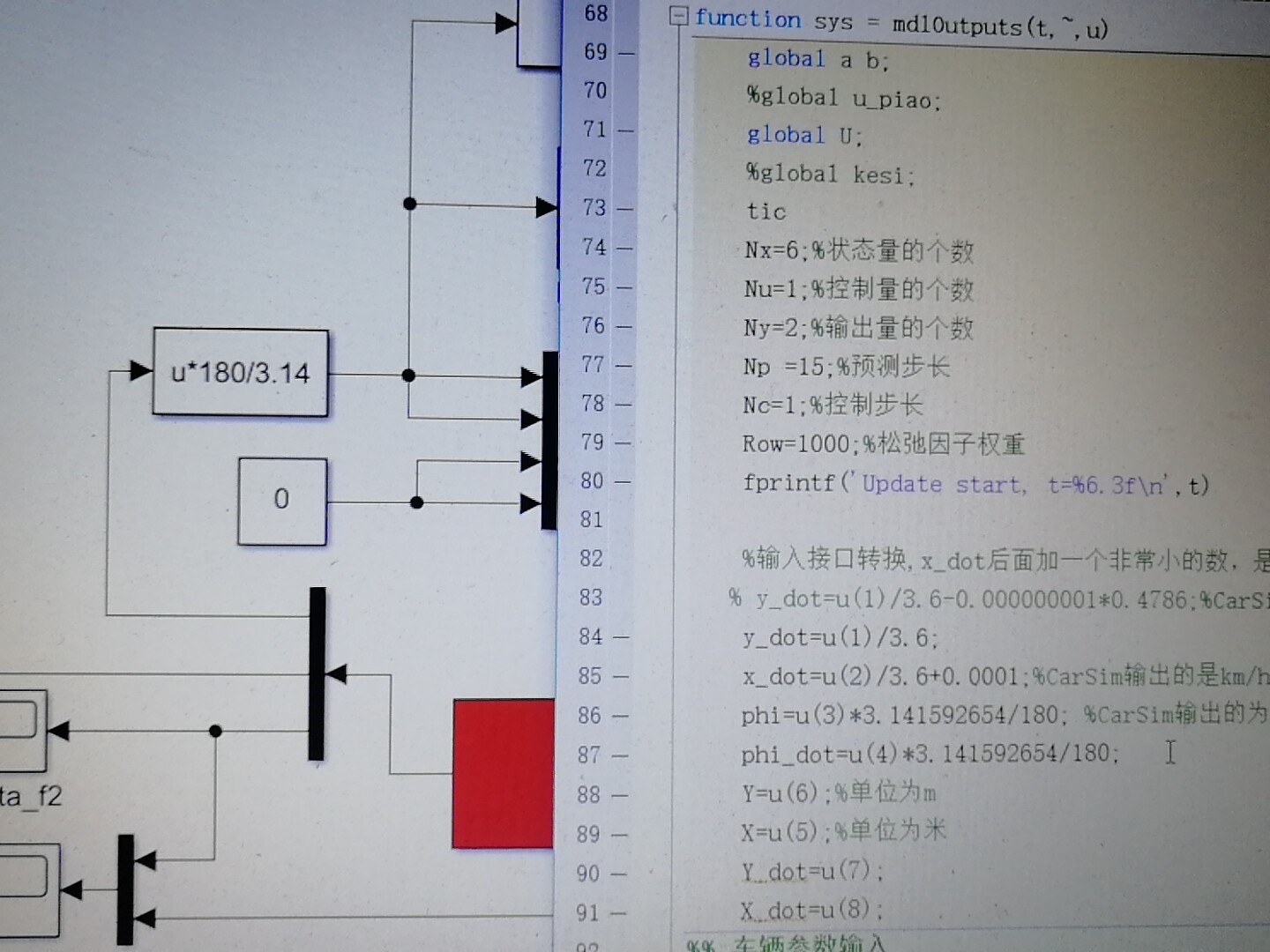
在无人驾驶技术领域,模型预测控制是一项具有广泛应用前景的关键技术。在本文中,我们将重点讨论无人驾驶模型预测控制的第五章代码,并介绍对该代码进行的重大修改以及相应的算法推导材料。
随着无人驾驶技术的不断发展,模型预测控制在实现无人驾驶汽车自主行驶方面起到了至关重要的作用。本文所讨论的第五章代码是在之前工作的基础上进行的重大修改,旨在提高代码的稳定性和控制效果。
在这一版本的代码中,我们引入了侧偏角软约束,以实现更优的控制结果。侧偏角是指车辆在行驶过程中与车辆纵向方向的夹角,对于无人驾驶汽车而言,通过对侧偏角进行约束,可以更好地控制车辆的横向运动。
在算法推导方面,我们提供了相应的材料来详细解释算法的原理和实现方法。这些材料将帮助读者更好地理解代码的设计思路和实现细节,从而为研究和应用无人驾驶模型预测控制提供有力的理论支持。
在开发过程中,我们使用了软件版本为carsim8.2和matlab2016b的工具。这些工具在无人驾驶技术研究中被广泛使用,具有强大的功能和灵活的扩展性,能够满足对模型预测控制的高要求。
总之,本文介绍了无人驾驶模型预测控制第五章代码的重大修改和优化措施,同时提供了对应的算法推导材料。我们相信,这些工作的完成将为无人驾驶技术的研究和应用带来积极的影响,推动无人驾驶技术的进一步发展和应用。
相关的代码,程序地址如下:http://imgcs.cn/615209474756.html
















 5038
5038











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









