










前言
- 机器视觉标定,也就是我们通常说的“手眼标定”,相机拍照的图像是基于像素坐标,而机器人用的是空间坐标系,所以手眼标定就是得到像素坐标系和机器人空间坐标系两者之间的坐标转换关系。
- 手眼标定的作用是,建立相机坐标系和机器人坐标系之间的变换关系,即给机器人装上眼睛,让它去哪就去哪。
九点标定说明
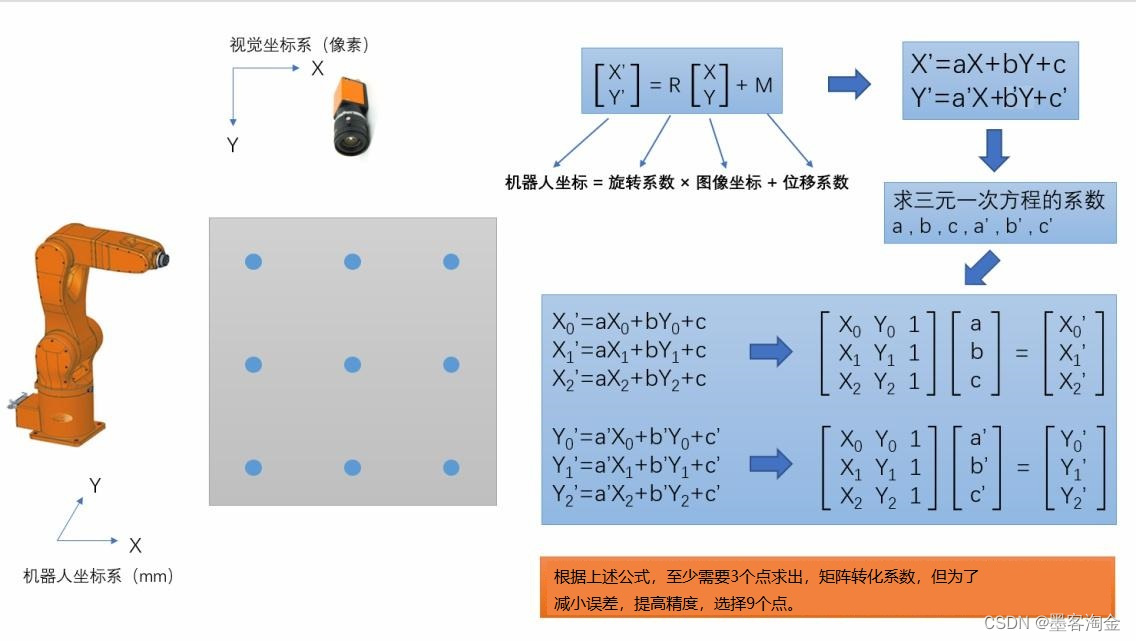
- 九点标定是常用的标定方法,在区域中均匀设定9个标定点,让机器人的工具末端去走这9个点得到在机器人坐标系中的坐标,同时用相机识别9个点得到像素坐标。这样就得到了9组对应的坐标,把数据代入到上述的公式中就能反推出转换系数,得出转换关系。
- 实际上,就是将机器人的坐标系与视觉的像素坐标系相互转化。
总结
-
这么复杂的公式看着都蒙圈,在实际操作中,其实并不需要我们来算,直接用视觉软件工具就能搞定。
-
1.在相机视野中贴上九个Mark圆点(成九宫格排列),并且拍下这张图片保存;
-
2.将机械手tool的中心依次移动到对准这九个Mark的中心,并记下tool对准每个Mark点中心时的机械手坐标;
-
3.通过图像处理计算出每个Mark圆点的圆心像素坐标; 运用相关图像处理工具,计算出像素坐标和机械手坐标的转换矩阵。
通过九点标定,可以建立相机坐标系和机械手坐标系之间的关系,从而实现视觉引导和机器人控制等应用


















 2641
2641

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











