






MPU6050是六轴姿态传感器,3轴加速度计(Accelerometer)测量X,Y,Z的加速度,3轴陀螺仪传感器(Gyroscope)测量X,Y,Z的角速度。若加上3轴磁场传感器就是9轴姿态传感器,若再加气压传感器就是10轴传感器。通过对这些轴的姿态融合即可得到欧拉角。
(1)MPU6050参数:
1.16位ADC采集传感器的模拟信号,量化范围:-32768~32767
2.加速度计满量程选择:2,
4,
8,
16(g)
3.陀螺仪满量程选择:250,
500,
1000,
2000(
/sec)
4.可配置的数字低通滤波器
5.可配置的时钟源
6.可配置的采样分频
(5.6一起使用,即配置时钟源后,再配置采样分频,然后做为ADC转化或者内部的别的电路的时钟)
(2)MPU6050的地址:
1101000或1101001
MPU6050的地址为七位,通常八位为一个数据帧,所以要在最后再加一位,若第八位为0,则是对寄存器写操作,若第八位为1,则是对寄存器读操作,即最后一位是指定对寄存器是读操作还是写操作。
MPU6050的地址前四位通常是1101,后三位为000,或者001,即最后一位可供使用者更改
需要更改时只需要对AD0引脚接高电平(AD0=1)或者低电平(AD0=0)即可实现更改。
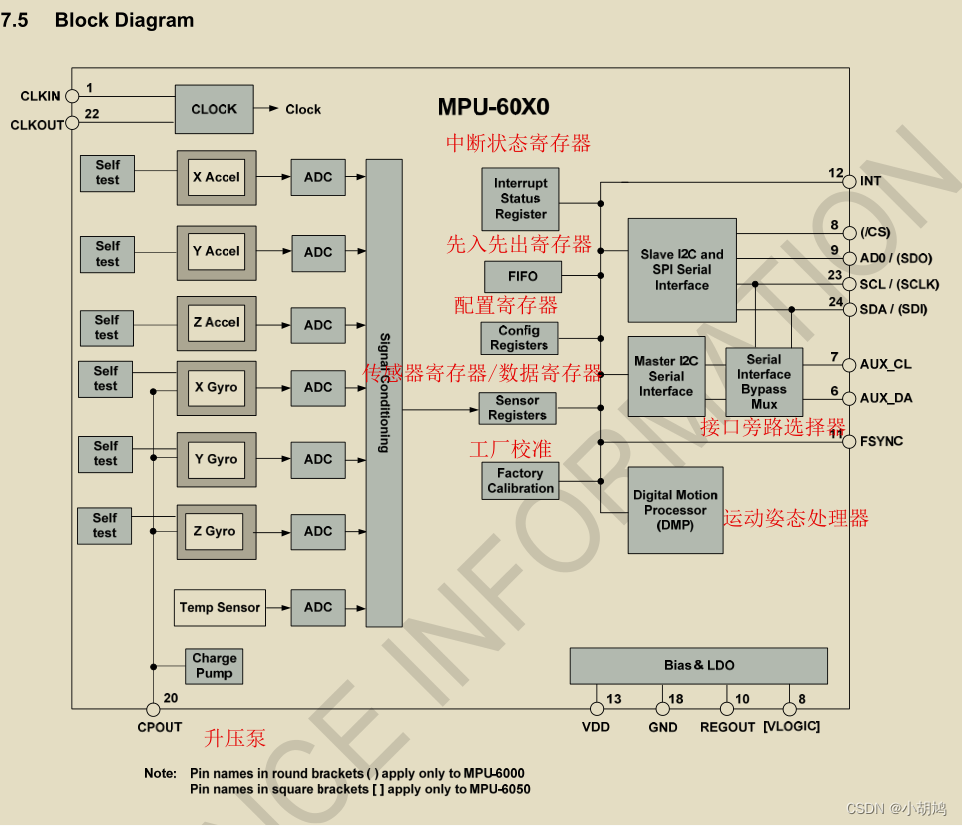
(3)MPU6050的引脚定义
| 引脚 | 功能 |
| VCC,GND | 电源 |
| SCL,SDA | I2C通信引脚 |
| XCL,XDA | 主机I2C通信引脚 |
| AD0 | 从机地址最低为 |
| INT | 中断信号输出 |
因为MPU6050是一个6轴姿态传感器,当需要做无人机或者别的项目时可能功能不够用,需要外扩模块,XCL和XDA就是与外接模块同信的,MPU6050主机接口可直接通过两个引脚访问外部数据。















 1721
1721











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









