






基于遗传算法的机器人路径规划
ga机器人路径规划算法
内涵详细的代码注释
ID:955714811487458
保利龙小叮当
在机器人技术领域,路径规划一直是一个重要的研究方向。而基于遗传算法的机器人路径规划算法由于其优秀的性能表现和广泛适用性,在该领域中受到了广泛关注和应用。本文将围绕基于遗传算法的机器人路径规划展开探讨,详细介绍其算法原理、代码实现以及内涵的代码注释。
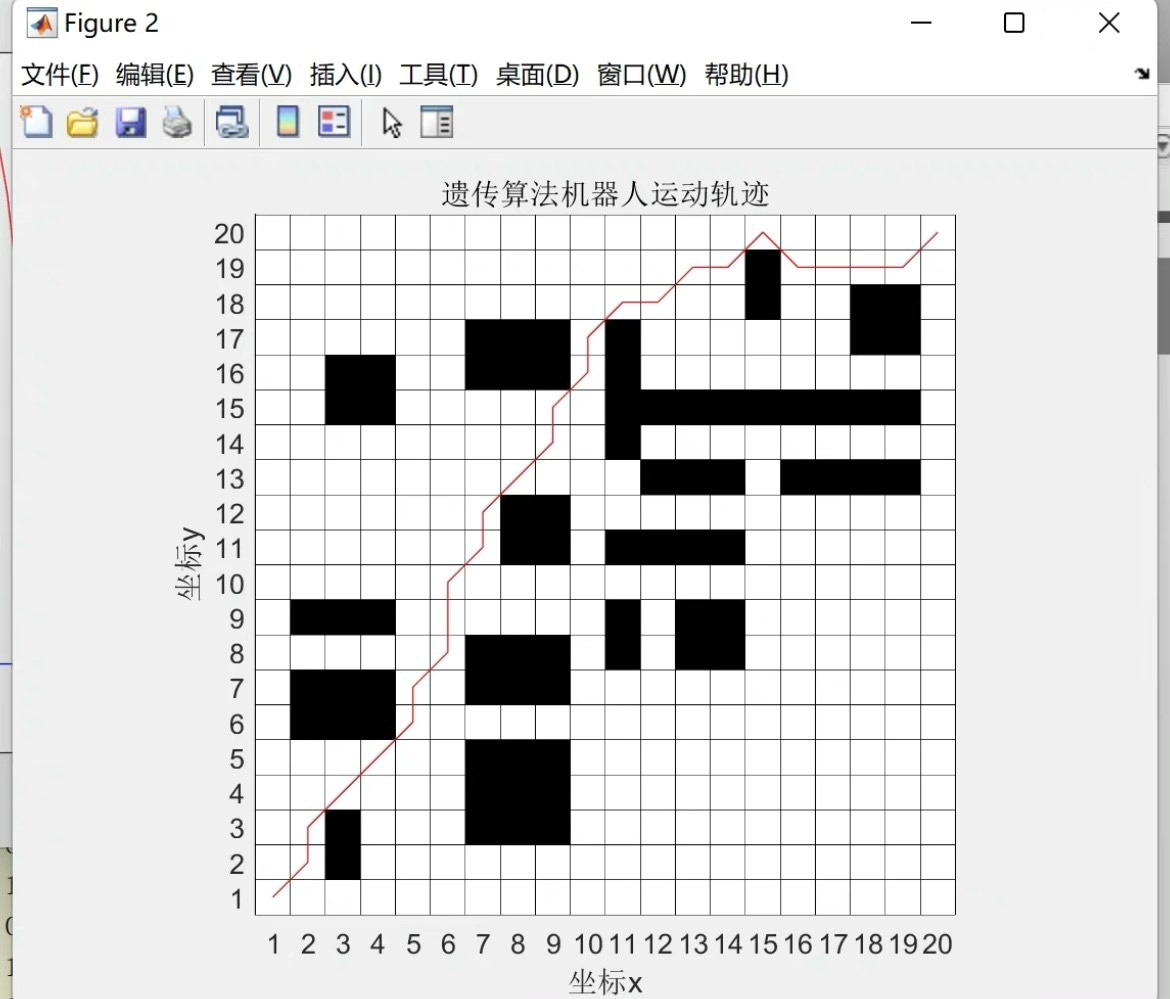
首先,我们来了解一下机器人路径规划的背景和意义。在实际应用中,机器人需要根据环境中的障碍物和目标位置,选择一条最优路径来达到目标。而路径规划算法就是用于解决这个问题的关键技术。基于遗传算法的机器人路径规划算法通过模拟生物进化的过程,利用种群的遗传变异和适应度评估,寻找到最优路径。相比于传统的路径规划方法,该算法具有更强的鲁棒性和适应性。
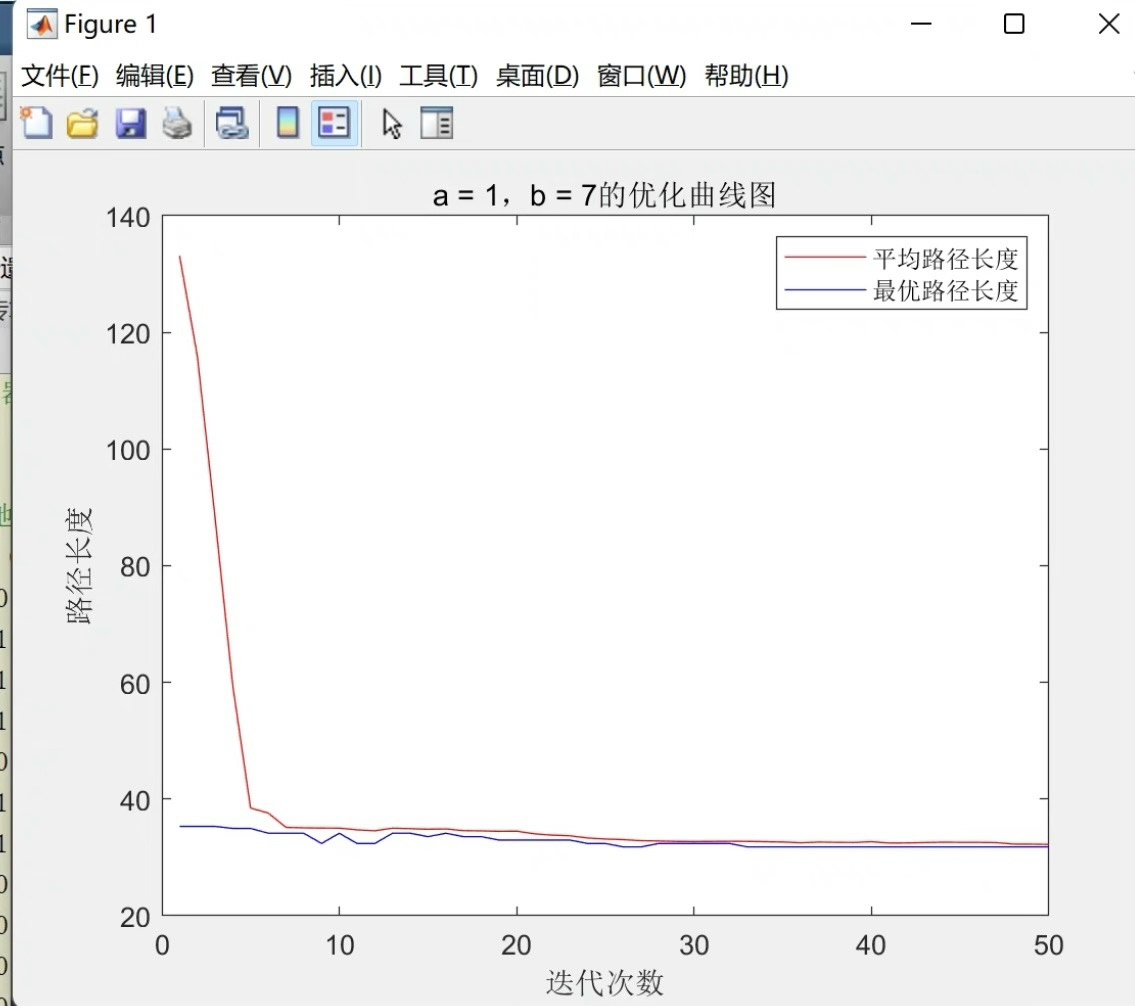
接下来,我们将详细介绍基于遗传算法的机器人路径规划算法的具体步骤和原理。该算法主要包括初始化种群、适应度评估、选择、交叉和变异等关键步骤。首先,我们需要随机生成一定数量的路径解,并对其进行评估,得到初始种群。然后,通过选择操作,按照适应度大小选择一部分个体作为下一代的父代。接着,进行交叉操作,通过染色体的交换和组合产生新的个体。最后,通过变异操作对个体的染色体进行微小的改变,增加种群的多样性。这样,经过多次迭代,算法将逐步收敛到最优解。
在代码实现方面,我们将使用Python语言编写基于遗传算法的机器人路径规划算法。通过使用遗传算法库和相关的数学计算库,我们可以方便地实现该算法的各个步骤。在代码中,我们将详细注释每一行代码的作用和实现原理,使读者能够更好地理解算法的实现过程。同时,我们也会对一些关键参数进行解释,如种群大小、交叉率和变异率等,帮助读者在实际应用中进行调优和改进。
基于遗传算法的机器人路径规划算法在实际应用中具有广泛的潜力和价值。它可以应用于各种机器人系统,如无人机、自动驾驶车辆和工业机器人等。通过该算法,机器人可以自主选择最优路径,提高工作效率和安全性。同时,该算法的鲁棒性和适应性也使得机器人能够应对复杂多变的环境,如动态障碍物和不确定性因素。
综上所述,基于遗传算法的机器人路径规划算法是一种优秀的解决方案。它通过模拟生物进化的过程,寻找最优路径,具有强大的鲁棒性和适应性。本文对该算法的原理、代码实现和内涵的代码注释进行了详细介绍,希望能够对读者理解和应用该算法有所帮助。在实际应用中,读者可以根据自己的需求和环境进行参数的调优和改进,以获得更好的结果。
【相关代码,程序地址】:http://fansik.cn/714811487458.html
















 968
968

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









