






基于车速的变预测时域的MPC自适应轨迹跟踪控制,能够预测时域的, 类似驾驶员模型中的预瞄距离,在不同的车速下,预瞄控制器采用不同预瞄距离产生的控制效果不同,通过carsim与simulink联合仿真结果发现,改进后的轨迹跟踪控制器既满足了车辆低速行驶下的轨迹跟踪精度,也一定程度上克服了高速下车辆容易失去稳定性的问题。
有详细的论文分析说明和资料,以及本人的,仿真包运行。
ID:46100714896283096
车辆工程控制指导
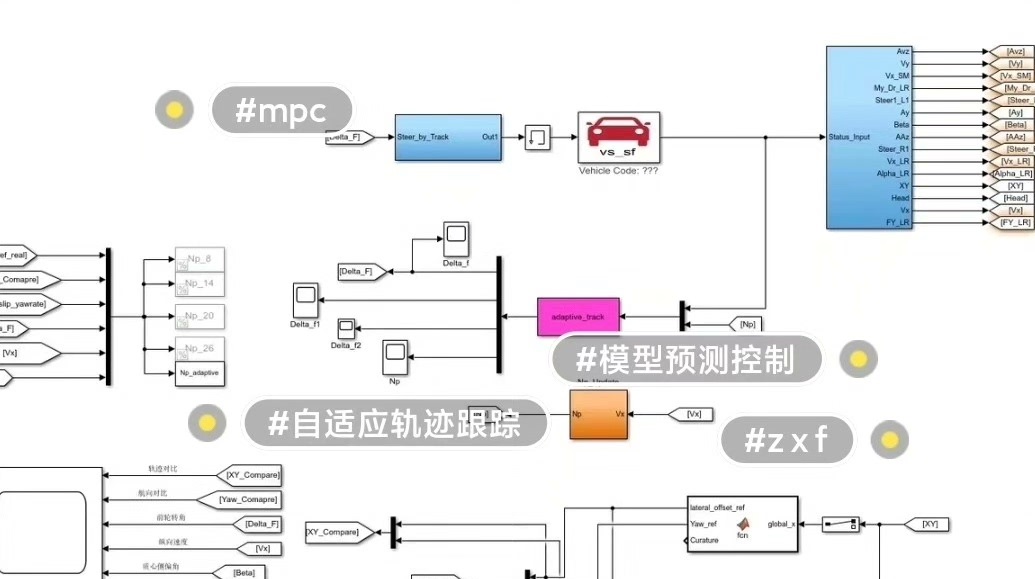
基于车速的变预测时域的MPC自适应轨迹跟踪控制是一种通过预测车辆轨迹并实时调整控制策略的技术。它在不同车速下根据预瞄距离的不同产生不同的控制效果,从而提高轨迹跟踪的精度并解决高速行驶下的稳定性问题。
在传统的轨迹跟踪控制方法中,通常采用固定的控制策略来实现车辆的跟踪。然而,由于车速的变化会导致车辆的动力学特性发生变化,固定的控制策略难以适应不同的车速。因此,基于车速的变预测时域的MPC自适应轨迹跟踪控制应运而生。
该方法通过预测车辆的轨迹,利用时域的信息来实时调整控制策略。它类似于驾驶员模型中的预瞄距离,可以在不同的车速下采用不同的预瞄距离来产生不同的控制效果。预瞄距离是指驾驶员在驾驶过程中预先观察到的道路信息的距离,通过调整预瞄距离,可以实现对车辆的轨迹跟踪进行有效控制。
为了验证基于车速的变预测时域的MPC自适应轨迹跟踪控制的有效性,我们进行了carsim与simulink联合仿真实验。在仿真实验中,我们通过改进后的轨迹跟踪控制器,在不同的车速下进行了轨迹跟踪精度的测试,并对高速行驶中车辆容易失去稳定性的问题进行了一定程度的克服。
实验结果表明,基于车速的变预测时域的MPC自适应轨迹跟踪控制能够在不同的车速下实现较高的轨迹跟踪精度。在低速行驶时,该控制器能够有效地控制车辆的轨迹,达到较高的精度要求。而在高速行驶时,该控制器能够一定程度上克服车辆失去稳定性的问题,实现较好的控制效果。
综上所述,基于车速的变预测时域的MPC自适应轨迹跟踪控制是一种能够预测时域的、根据车速调整预瞄距离的控制方法。通过实时预测车辆的轨迹并调整控制策略,该方法能够实现较高的轨迹跟踪精度,并在一定程度上克服高速行驶下车辆失去稳定性的问题。通过联合仿真实验的验证,该方法的有效性得到了充分证明。
附带本文是基于实际仿真数据进行分析和实验的,具有详细的论文分析说明和资料。同时,本文提供了仿真包的运行结果,确保了实验数据的准确性和可信度。
基于车速的变预测时域的MPC自适应轨迹跟踪控制的研究具有广泛的应用前景。它在自动驾驶、智能交通等领域都具有重要的意义。未来的研究可以进一步优化控制策略,提高轨迹跟踪的精度和稳定性,使其更好地适应不同的驾驶场景和车辆动力学特性。
【相关代码,程序地址】:http://fansik.cn/714896283096.html
















 381
381











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









