







OnLanePlanning
介绍
-
功能定位:
- 高精地图规划:基于高精地图生成参考线,适用于 城市道路、复杂交通场景(如红绿灯路口、人行道)。
- 场景机制:内置双层状态机(Scenario + Stage),支持
LaneFollowScenario(车道保持)、TrafficLightProtectedScenario(交通灯路口)等场景。 - 任务调度:调用
PublicRoadPlanner等规划器,执行具体的路径优化算法(如 EM Planner、Lattice Planner)。
-
典型流程:
- 生成参考线(
ReferenceLineProvider)。 - 场景切换判定(
ScenarioManager::Update())。 - 执行场景内的多阶段任务(Stage + Task)。
- 生成参考线(
OnLanePlanning继承自PlanningBase类,在planning_component初始化的时候使用参数进行选择加载。
初始化(Init)流程:
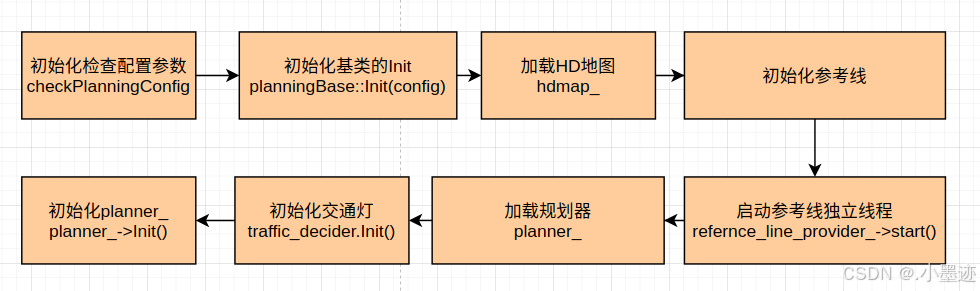
1、检查配置参数是否有问题;
2、初始化基类Init;
3、清楚历史数据缓存;
4、重置PlanningStatus 状态机;
5、加载高精地图hdmap_;
6、初始化参考线线程reference_line_provider_;
7、开启参考线线程;
8、加载规划器;
9、判断planner_是否加载成功;
10、初始化交通决策器
11、初始化规划器planner_->Init()
- 通过初始化,将
PlanningStatus状态机重置、加载高精地图hdmap_、开启参考线线程reference_line_provider_、加载规划器planner_、初始化交通决策器traffic_decider_、初始化规划器planner_。
代码注释
Status OnLanePlanning::Init(const PlanningConfig& config) {
if (!CheckPlanningConfig(config)) {
return Status(ErrorCode::PLANNING_ERROR, "planning config error: " + config.DebugString());
}
PlanningBase::Init(config);
// clear planning history 清除 History 类中缓存的障碍物状态和决策信息,避免历史数据干扰新规划周期。
injector_->history()->Clear();
// clear planning status 重置 PlanningStatus 状态机(如变道、停车等场景状态),确保规划从初始条件开始
injector_->planning_context()->mutable_planning_status()->Clear();
// load map 通过 HDMapUtil 获取高精地图(HDMap)指针,用于 生成参考线、车道匹配、场景判定(如红绿灯路口)。
hdmap_ = HDMapUtil::BaseMapPtr();
ACHECK(hdmap_) << "Failed to load map";
// instantiate reference line provider 成车辆周围的参考线(Reference Line),提供平滑的中心车道线轨迹,用于路径规划和横向控制。
const ReferenceLineConfig* reference_line_config = nullptr;
if (config_.has_reference_line_config()) {
reference_line_config = &config_.reference_line_config();
}
// 配置参数 reference_line_config 控制参考线生成规则(如采样间隔、车道扩展范围)。
reference_line_provider_ = std::make_unique<ReferenceLineProvider>(
injector_->vehicle_state(), reference_line_config);
// 启动独立线程持续更新参考线,确保实时性。
reference_line_provider_->Start();
// dispatch planner
LoadPlanner();//在基类中加载规划器,默认使用 PublicRoadPlanner
if (!planner_) {
return Status(
ErrorCode::PLANNING_ERROR,
"planning is not initialized with config : " + config_.DebugString());
}
// 学习模式初始化
if (config_.learning_mode() != PlanningConfig::NO_LEARNING) {
PlanningSemanticMapConfig renderer_config;
ACHECK(apollo::cyber::common::GetProtoFromFile(
FLAGS_planning_birdview_img_feature_renderer_config_file,
&renderer_config))
<< "Failed to load renderer config"
<< FLAGS_planning_birdview_img_feature_renderer_config_file;
BirdviewImgFeatureRenderer::Instance()->Init(renderer_config);
}
// 交通决策器初始化
traffic_decider_.Init(injector_);
// 记录启动时间与规划器初始化
start_time_ = Clock::NowInSeconds();
return planner_->Init(injector_, FLAGS_planner_config_path);
}
重点:
高精地图获取
高精地图获取是通过HDMapUtil::BaseMapPtr();获取,以下是源码
const HDMap* HDMapUtil::BaseMapPtr() {
if (base_map_ == nullptr) {
std::lock_guard<std::mutex> lock(base_map_mutex_);
if (base_map_ == nullptr) { // Double check.
base_map_ = CreateMap(BaseMapFile());
}
}
return base_map_.get();
}
参考线线程
参考线线程的配置参数是apollo::planning::LaneFollowMap,在文件planning_config.txt中配置
代码为
const ReferenceLineConfig* reference_line_config = nullptr;
if (config_.has_reference_line_config()) {
reference_line_config = &config_.reference_line_config();
}
// 配置参数 reference_line_config 控制参考线生成规则(如采样间隔、车道扩展范围)。
reference_line_provider_ = std::make_unique<ReferenceLineProvider>(
injector_->vehicle_state(), reference_line_config);
reference_line_provider_->Start();
LaneFollowMap: PncMapBase的一个子类,在lane_follow_command指令下,从routing结果转换到ReferenceLine的过程中做前期准备,主要功能是处理routing结果,将routing数据处理并存储在map相关的数据结构中;根据routing结果及当前车辆位置,计算可行驶的passage信息,并转换成RouteSegments结构,为ReferenceLine提供数据传入参数。封装在reference_line_provider中。
规划器的加载
默认加载PublicRoadPlanner规划器
LoadPlanner();
交通决策器的加载
定义在planning_interface_base/traffic_rules_base/traffic_decider.h中,是planning在运行场景之前,根据不同的交通规则,决策车辆是否需要停车,减速或其他操作。因为它是在运行场景之前进行的,所以对所有的场景都会起作用。
traffic_decider_实在planning_base基类中申明。
相关链接:Apollo学习——planning模块(4)之traffic_decider交通规则决策器
traffic_decider_.Init(injector_);
planner_初始化
默认使用PublicRoadPlanner规划器
规划(RunOnce)流程:
OnLanePlanning::RunOnce是在主程序中循环调用,为核心程序,是规划器规划的入口程序。
1、将获取到的信息赋值给类内参数local_view_ = local_view;
2、记录当前时间;
3、获取车辆当前数据状态status,数据异常会返回状态为error;
4、如果状态status有问题,或者车速位置等不合理,则生成停车轨迹;
5、时间对齐处理;
6、通知参考线提供者当前车辆位置
7、获取终点车道信息;
8、轨迹缝合计算 避免规划周期切换时的轨迹跳变,保证控制连续性;
9、更新自车信息;
10、裁剪参考线,并更新状态status;
11、如果status有问题,则生成停车轨迹;
12、交通规则决策 遍历交通规则 整合规则处理结果,构建最终的车辆行为目标;
13、执行规划核心逻辑plan,并返回状态status;
14、打印log(轨迹点、自车的外轮廓);
15、判断status是否问题,则生成停车轨迹;
16、重规划标记与原因记录
17、通过OpenSpaceInfo类判断当前是否处于开放空间轨迹模式;
18、如果是泊车,直接填充规划消息(FillPlanningPb),无需参考线延迟统计;
19、否则常规道路逻辑,记录参考线的耗时;
20、记录耗时等信息。
重点
获取从外界获取的各种信息local_view_
通过形参将local_view传到函数内
local_view_ = local_view;
校验数据返回状态status
// 将定位和底盘数据融合为统一的车辆状态(如坐标、速度、航向角等) 若定位数据缺失或底盘信号异常,Update()会返回错误状态。
Status status = injector_->vehicle_state()->Update(*local_view_.localization_estimate, *local_view_.chassis);
获取车辆状态vehicle_state
// 时间戳一致性校验 确保规划周期开始时间不早于车辆状态更新时间,避免使用过期数据。
VehicleState vehicle_state = injector_->vehicle_state()->vehicle_state();
时间校验
// 检测规划系统时间(start_timestamp)是否落后于车辆状态时间(vehicle_state_timestamp)。
if (start_timestamp + 1e-6 < vehicle_state_timestamp) {
common::monitor::MonitorLogBuffer monitor_logger_buffer(
common::monitor::MonitorMessageItem::PLANNING);
monitor_logger_buffer.ERROR("ego system time is behind GPS time");
}
通知参考线提供者当前车辆位置
// 通知参考线提供者当前车辆位置
reference_line_provider_->UpdateVehicleState(vehicle_state);
获取终点
// 从参考线提供者获取当前路由的终点车道点(用于判断是否接近目的地)。
reference_line_provider_->GetEndLaneWayPoint(local_view_.end_lane_way_point);//结果存入local_view_.end_lane_way_point供后续逻辑使用。
缝合轨迹
//轨迹缝合计算 避免规划周期切换时的轨迹跳变,保证控制连续性
std::vector<TrajectoryPoint> stitching_trajectory = //缝合后的轨迹
TrajectoryStitcher::ComputeStitchingTrajectory(
*(local_view_.chassis), vehicle_state, start_timestamp,
planning_cycle_time, FLAGS_trajectory_stitching_preserved_length,//保留的历史轨迹长度(默认约3秒)FLAGS_trajectory_stitching_preserved_length = 3s
true, last_publishable_trajectory_.get(), &replan_reason, // 重规划原因(replan_reason)
*local_view_.control_interactive_msg);
裁剪参考线
//裁剪参考线 障碍物投影到参考线坐标系 生成ReferenceLineInfo对象(含路径、速度决策结果) 绑定车辆状态和初始轨迹点。
status = InitFrame(frame_num, stitching_trajectory.back(), vehicle_state);
交通规则决策 遍历交通规则 整合规则处理结果
// 交通规则决策 遍历交通规则 整合规则处理结果,构建最终的车辆行为目标
for (auto& ref_line_info : *frame_->mutable_reference_line_info()) { // 遍历所有参考线(reference_line_info)。
auto traffic_status = traffic_decider_.Execute(frame_.get(), &ref_line_info); // 执行交通规则决策(如红绿灯、停止线判断)。
if (!traffic_status.ok() || !ref_line_info.IsDrivable()) { // 若决策失败或参考线不可行驶,标记该参考线为不可用状态。
ref_line_info.SetDrivable(false);
AWARN << "Reference line " << ref_line_info.Lanes().Id()<< " traffic decider failed";
}
}
执行规划核心逻辑Plan方法
// 执行规划核心逻辑 1、路径优化(QP/SQP算法)。2、速度规划(ST图优化)。3、障碍物交互决策(如让行或超车)。
// 调用场景管理器(Scenario Manager)和任务执行器(Task Executor)
status = Plan(start_timestamp, stitching_trajectory, ptr_trajectory_pb); // 规划周期开始时间 缝合路径时间
代码解释
// 先执行交通规则 再规划轨迹 规划轨迹的函数是Plan
void OnLanePlanning::RunOnce(const LocalView& local_view,
ADCTrajectory* const ptr_trajectory_pb) {
// when rerouting, reference line might not be updated. In this case, planning
// module maintains not-ready until be restarted.
local_view_ = local_view;
// 以下时间将用于后续校验数据时效性和轨迹时间补偿
const double start_timestamp = Clock::NowInSeconds();// 记录当前规划周期开始的Apollo内部时钟时间(秒)。
const double start_system_timestamp = std::chrono::duration<double>(
std::chrono::system_clock::now().time_since_epoch()).count();//记录系统时钟的绝对时间(Unix时间戳)。
// localization
ADEBUG << "Get localization:"<< local_view_.localization_estimate->DebugString();
// chassis
ADEBUG << "Get chassis:" << local_view_.chassis->DebugString();
// 将定位和底盘数据融合为统一的车辆状态(如坐标、速度、航向角等) 若定位数据缺失或底盘信号异常,Update()会返回错误状态。
Status status = injector_->vehicle_state()->Update(*local_view_.localization_estimate, *local_view_.chassis);
VehicleState vehicle_state = injector_->vehicle_state()->vehicle_state();// 时间戳一致性校验 确保规划周期开始时间不早于车辆状态更新时间,避免使用过期数据。
const double vehicle_state_timestamp = vehicle_state.timestamp();
DCHECK_GE(start_timestamp, vehicle_state_timestamp)
<< "start_timestamp is behind vehicle_state_timestamp by "
<< start_timestamp - vehicle_state_timestamp << " secs";
//车辆异常状态处理
if (!status.ok() || !util::IsVehicleStateValid(vehicle_state)) { //IsVehicleStateValid()会校验车速、位置等是否在合理范围内
const std::string msg =
"Update VehicleStateProvider failed "
"or the vehicle state is out dated.";
AERROR << msg;
ptr_trajectory_pb->mutable_decision()
->mutable_main_decision()
->mutable_not_ready()
->set_reason(msg);// 在轨迹消息(ptr_trajectory_pb)中设置not_ready状态及原因。
status.Save(ptr_trajectory_pb->mutable_header()->mutable_status());//将错误码存入消息头部的status字段。
// TODO(all): integrate reverse gear 安全措施
ptr_trajectory_pb->set_gear(canbus::Chassis::GEAR_DRIVE);//强制设置档位为前进档
FillPlanningPb(start_timestamp, ptr_trajectory_pb); // 填充规划消息头
GenerateStopTrajectory(ptr_trajectory_pb); // 生成停车轨迹(GenerateStopTrajectory),确保车辆安全停止
return;
}
// 检测规划系统时间(start_timestamp)是否落后于车辆状态时间(vehicle_state_timestamp)。
if (start_timestamp + 1e-6 < vehicle_state_timestamp) {
common::monitor::MonitorLogBuffer monitor_logger_buffer(
common::monitor::MonitorMessageItem::PLANNING);
monitor_logger_buffer.ERROR("ego system time is behind GPS time");
}
//时间对齐处理 若时间差小于阈值(message_latency_threshold,默认约0.5秒)
if (start_timestamp - vehicle_state_timestamp <
FLAGS_message_latency_threshold) {
//调用AlignTimeStamp()对齐车辆状态时间戳到规划周期开始时间。 确保规划使用的车辆状态与当前周期时间严格同步
vehicle_state = AlignTimeStamp(vehicle_state, start_timestamp);
}
// 参考线更新与场景重置 Update reference line provider and reset scenario if new routing
// 通知参考线提供者当前车辆位置
reference_line_provider_->UpdateVehicleState(vehicle_state);
if (local_view_.planning_command->is_motion_command() &&
util::IsDifferentRouting(last_command_, *local_view_.planning_command)) {//比较新旧规划命令
last_command_ = *local_view_.planning_command;
// AINFO << "new_command:" << last_command_.DebugString();
reference_line_provider_->Reset();//清空参考线缓存
injector_->history()->Clear();//清除历史轨迹
injector_->planning_context()->mutable_planning_status()->Clear();//重置规划状态机
reference_line_provider_->UpdatePlanningCommand(//更新新路由命令
*(local_view_.planning_command));
planner_->Reset(frame_.get());//重置规划器内部状态
}
// 获取终点车道信息 Get end lane way point.
// 从参考线提供者获取当前路由的终点车道点(用于判断是否接近目的地)。
reference_line_provider_->GetEndLaneWayPoint(local_view_.end_lane_way_point);//结果存入local_view_.end_lane_way_point供后续逻辑使用。
// planning is triggered by prediction data, but we can still use an estimated
// cycle time for stitching
const double planning_cycle_time = 1.0 / static_cast<double>(FLAGS_planning_loop_rate);//规划周期 FLAGS_planning_loop_rate = 10Hz
std::string replan_reason;
//轨迹缝合计算 避免规划周期切换时的轨迹跳变,保证控制连续性
std::vector<TrajectoryPoint> stitching_trajectory = //缝合后的轨迹
TrajectoryStitcher::ComputeStitchingTrajectory(
*(local_view_.chassis), vehicle_state, start_timestamp,
planning_cycle_time, FLAGS_trajectory_stitching_preserved_length,//保留的历史轨迹长度(默认约3秒)FLAGS_trajectory_stitching_preserved_length = 3s
true, last_publishable_trajectory_.get(), &replan_reason, // 重规划原因(replan_reason)
*local_view_.control_interactive_msg);
// 自车信息更新 用缝合轨迹的终点和当前车辆状态更新自车信息(ego_info)。
injector_->ego_info()->Update(stitching_trajectory.back(), vehicle_state);// back()缝合轨迹的最后一个点(最近未来状态)。 vehicle_state当前车辆状态(位置、速度等)。
// 步骤:
// 分配帧序号(frame_num),用于日志追踪。调用InitFrame()初始化规划帧:
const uint32_t frame_num = static_cast<uint32_t>(seq_num_++);
AINFO << "Planning start frame sequence id = [" << frame_num << "]";
//裁剪参考线 障碍物投影到参考线坐标系 生成ReferenceLineInfo对象(含路径、速度决策结果) 绑定车辆状态和初始轨迹点。
status = InitFrame(frame_num, stitching_trajectory.back(), vehicle_state);
if (status.ok()) {
injector_->ego_info()->CalculateFrontObstacleClearDistance(
frame_->obstacles());//计算自车到最近障碍物的纵向距离(用于跟车或避障)。
injector_->ego_info()->CalculateCurrentRouteInfo(
reference_line_provider_.get());// 基于参考线计算当前路径的曲率、长度等属性。
}
// 功能:当启用调试标志时,将规划输入数据(如障碍物、参考线)记录到轨迹消息的debug字段。
// 用途:用于离线回放或可视化工具(如Dreamview)分析规划决策依据。
if (FLAGS_enable_record_debug) {
frame_->RecordInputDebug(ptr_trajectory_pb->mutable_debug());
}
// 计算帧初始化耗时(从start_timestamp到当前时间),存入轨迹的延迟统计字段。帮助识别初始化阶段的性能瓶颈。
ptr_trajectory_pb->mutable_latency_stats()->set_init_frame_time_ms(Clock::NowInSeconds() - start_timestamp);
// 规划失败处理
if (!status.ok()) {
AERROR << status.ToString();
if (FLAGS_publish_estop) { // 紧急停止模式(publish_estop)
// "estop" signal check in function "Control::ProduceControlCommand()"
// estop_ = estop_ || local_view_.trajectory.estop().is_estop();
// we should add more information to ensure the estop being triggered.
ADCTrajectory estop_trajectory;
EStop* estop = estop_trajectory.mutable_estop(); //创建包含EStop标志的轨迹,标记紧急停止原因
estop->set_is_estop(true);
estop->set_reason(status.error_message());
status.Save(estop_trajectory.mutable_header()->mutable_status());
ptr_trajectory_pb->CopyFrom(estop_trajectory); //将错误状态保存到消息头。
} else {// 普通错误模式
ptr_trajectory_pb->mutable_decision()
->mutable_main_decision()
->mutable_not_ready()
->set_reason(status.ToString()); // 设置决策结果为not_ready并注明原因。
status.Save(ptr_trajectory_pb->mutable_header()->mutable_status());
GenerateStopTrajectory(ptr_trajectory_pb); //生成停车轨迹(GenerateStopTrajectory)。
}
// TODO(all): integrate reverse gear
ptr_trajectory_pb->set_gear(canbus::Chassis::GEAR_DRIVE);
FillPlanningPb(start_timestamp, ptr_trajectory_pb);
frame_->set_current_frame_planned_trajectory(*ptr_trajectory_pb);
const uint32_t n = frame_->SequenceNum();
injector_->frame_history()->Add(n, std::move(frame_));
return;
}
// 交通规则决策 遍历交通规则 整合规则处理结果,构建最终的车辆行为目标
for (auto& ref_line_info : *frame_->mutable_reference_line_info()) { // 遍历所有参考线(reference_line_info)。
auto traffic_status = traffic_decider_.Execute(frame_.get(), &ref_line_info); // 执行交通规则决策(如红绿灯、停止线判断)。
if (!traffic_status.ok() || !ref_line_info.IsDrivable()) { // 若决策失败或参考线不可行驶,标记该参考线为不可用状态。
ref_line_info.SetDrivable(false);
AWARN << "Reference line " << ref_line_info.Lanes().Id()<< " traffic decider failed";
}
}
// 执行规划核心逻辑 1、路径优化(QP/SQP算法)。2、速度规划(ST图优化)。3、障碍物交互决策(如让行或超车)。
// 调用场景管理器(Scenario Manager)和任务执行器(Task Executor)
status = Plan(start_timestamp, stitching_trajectory, ptr_trajectory_pb); // 规划周期开始时间 缝合路径时间
// print trajxy 轨迹与障碍物可视化调试
PrintCurves trajectory_print_curve; // 轨迹点打印
for (const auto& p : ptr_trajectory_pb->trajectory_point()) {
trajectory_print_curve.AddPoint("trajxy", p.path_point().x(),
p.path_point().y());
}
trajectory_print_curve.PrintToLog();
// print obstacle polygon // 障碍物多边形打印
for (const auto& obstacle : frame_->obstacles()) {
obstacle->PrintPolygonCurve();
}
// print ego box // 自车包围盒打印
PrintBox print_box("ego_box");
print_box.AddAdcBox(vehicle_state.x(), vehicle_state.y(),
vehicle_state.heading(), true);
print_box.PrintToLog();
// 性能统计与监控
const auto end_system_timestamp =
std::chrono::duration<double>(std::chrono::system_clock::now().time_since_epoch()).count();
// 从规划开始到结束的系统时钟差值(毫秒)
const auto time_diff_ms = (end_system_timestamp - start_system_timestamp) * 1000;
ADEBUG << "total planning time spend: " << time_diff_ms << " ms.";
ptr_trajectory_pb->mutable_latency_stats()->set_total_time_ms(time_diff_ms);
ADEBUG << "Planning latency: "<< ptr_trajectory_pb->latency_stats().DebugString();
// 当规划状态status异常时(如路径搜索失败或约束冲突):
if (!status.ok()) {
status.Save(ptr_trajectory_pb->mutable_header()->mutable_status()); // 保存错误状态:将错误码和描述存入轨迹消息头部的status字段,供控制模块解析
AERROR << "Planning failed:" << status.ToString();
if (FLAGS_publish_estop) { // 紧急停止(EStop)处理
AERROR << "Planning failed and set estop";
// "estop" signal check in function "Control::ProduceControlCommand()"
// estop_ = estop_ || local_view_.trajectory.estop().is_estop();
// we should add more information to ensure the estop being triggered.
EStop* estop = ptr_trajectory_pb->mutable_estop();
estop->set_is_estop(true); // 若启用FLAGS_publish_estop,设置紧急停止标志is_estop为true,并记录失败原因(如"障碍物避让失败")。
estop->set_reason(status.error_message()); // 控制模块收到含estop的轨迹后,会立即触发刹车或停车
}
}
// 重规划标记与原因记录
ptr_trajectory_pb->set_is_replan(stitching_trajectory.size() == 1);
if (ptr_trajectory_pb->is_replan()) { //is_replan标记:若缝合轨迹(stitching_trajectory)仅含1个点,说明需完全重新规划(如因路由变更或突发障碍)
ptr_trajectory_pb->set_replan_reason(replan_reason); // 记录具体原因(如"参考线不连续"或"动态障碍物阻挡"),用于调试和策略优化
}
// 通过OpenSpaceInfo类判断当前是否处于开放空间轨迹模式
// 开放空间(没有参考线,停车场之类的地方)轨迹不依赖传统车道参考线,使用自由空间规划算法(如混合A*)
if (frame_->open_space_info().is_on_open_space_trajectory()) {
// 开放空间逻辑 直接填充规划消息(FillPlanningPb),无需参考线延迟统计
FillPlanningPb(start_timestamp, ptr_trajectory_pb);
ADEBUG << "Planning pb:" << ptr_trajectory_pb->header().DebugString();
frame_->set_current_frame_planned_trajectory(*ptr_trajectory_pb);
} else { // 常规道路逻辑
auto* ref_line_task = ptr_trajectory_pb->mutable_latency_stats()->add_task_stats();
ref_line_task->set_time_ms(reference_line_provider_->LastTimeDelay() * 1000.0);//记录ReferenceLineProvider生成参考线的耗时(毫秒),用于性能分析
ref_line_task->set_name("ReferenceLineProvider");
FillPlanningPb(start_timestamp, ptr_trajectory_pb);
ADEBUG << "Planning pb:" << ptr_trajectory_pb->header().DebugString();
frame_->set_current_frame_planned_trajectory(*ptr_trajectory_pb);
if (FLAGS_enable_planning_smoother) { // 若启用FLAGS_enable_planning_smoother,调用planning_smoother_基于历史帧优化轨迹连续性(如减少急转弯)
planning_smoother_.Smooth(injector_->frame_history(), frame_.get(),
ptr_trajectory_pb);
}
}
// 性能指标:
// 计算整个规划周期耗时(plnning_perf_ms),从start_system_timestamp到当前时间
// 规划器名称(如OnLanePlanning)和耗时,用于监控实时性
const auto end_planning_perf_timestamp = /* 当前系统时间 */
std::chrono::duration<double>(
std::chrono::system_clock::now().time_since_epoch())
.count();
const auto plnning_perf_ms =
(end_planning_perf_timestamp - start_system_timestamp) * 1000;
AINFO << "Planning Perf: planning name [" << Name() << "], "
<< plnning_perf_ms << " ms.";
AINFO << "Planning end frame sequence id = [" << frame_num << "]";
injector_->frame_history()->Add(frame_num, std::move(frame_)); // 记录帧序号(frame_num)和轨迹数据到frame_history,支持回溯分析和调试
}
规划核心逻辑(Plan)流程:
执行规划核心逻辑 1、路径优化(QP/SQP算法)。2、速度规划(ST图优化)。3、障碍物交互决策(如让行或超车)。 调用场景管理器(Scenario Manager)和任务执行器(Task Executor)。
通过planner_->Plan生成轨迹,支持混合A*算法PublicRoadPlannerstitching_trajectory.back():历史轨迹末端点,确保新轨迹与历史轨迹平滑衔接 frame_.get():包含本周期所有上下文数据(障碍物、定位、参考线等)front_clear_distance:写入车辆前方安全距离,用于控制模块的碰撞检测
// 开放空间 : 调用HybridAStar生成粗轨迹,通过OBCA优化
// 常规道路:使用PublicRoadPlanner进行车道级路径-速度解耦规划
1、执行planner_->plan进行规划路线
2、判断是泊车还是常规行驶
泊车:
(1)同步调试信息:将开放空间规划过程中的调试数据(如轨迹优化中间状态、碰撞检测结果)同步到 debug_instance_,用于可视化或日志分析。;
(2)获取可发布的轨迹数据,前面生成的轨迹点和当前的档位(倒车过程总需要频繁切换档位);
(3)设置轨迹类型与碰撞状态
(4)将以上状态类型等内容填充到ptr_trajectory_pb中
(5)生成人工介入建议
(6)设置停车决策状态:IN_PARKING,目的是告诉控制模块,目前处于停车中。
常规行驶:
(1)从Frame对象中获取当前最优驾驶参考线信息,选最小cost的轨迹
(2)在变道场景下的目标车道参考线,用于长周期决策规划
(3)当无有效参考线时,清空历史轨迹并返回PLANNING_ERROR,触发停车
(4)plan规划的轨迹拼接最优参考线,确保轨迹连续性
(5)将规划的参考线与当前使用的参考线进行合并
(6)将车道线信息以及路 权,车道线信息、轨迹类型等传入ptr_trajectory_pb
(7)将轨迹数据转换为 Protobuf 格式,轨迹发布
代码解释
Status OnLanePlanning::Plan(const double current_time_stamp, const std::vector<TrajectoryPoint>& stitching_trajectory, ADCTrajectory* const ptr_trajectory_pb) {
auto* ptr_debug = ptr_trajectory_pb->mutable_debug();
if (FLAGS_enable_record_debug) {
ptr_debug->mutable_planning_data()->mutable_init_point()->CopyFrom(
stitching_trajectory.back());
frame_->mutable_open_space_info()->set_debug(ptr_debug);
frame_->mutable_open_space_info()->sync_debug_instance();
}
// 通过planner_->Plan生成轨迹,支持混合A*算法与PublicRoadPlanner
// stitching_trajectory.back():历史轨迹末端点,确保新轨迹与历史轨迹平滑衔接
// frame_.get():包含本周期所有上下文数据(障碍物、定位、参考线等)
// front_clear_distance:写入车辆前方安全距离,用于控制模块的碰撞检测
// 开放空间 : 调用HybridAStar生成粗轨迹,通过OBCA优化
// 常规道路:使用PublicRoadPlanner进行车道级路径-速度解耦规划
// planner_的定义在modules/planning/planning_interface_base/planner_base planner_-> PlannerWithReferenceLine -> PublicRoadPlanner
auto status = planner_->Plan(stitching_trajectory.back(), frame_.get(), ptr_trajectory_pb);
ptr_debug->mutable_planning_data()->set_front_clear_distance(injector_->ego_info()->front_clear_distance());
// 获取可发布的轨迹数据
if (frame_->open_space_info().is_on_open_space_trajectory()) {//判断是否是开放道路,如果是开放空间则需要使用混合A*算法生成初始轨迹
frame_->mutable_open_space_info()->sync_debug_instance(); // 将开放空间规划器的内部状态(如QP求解器迭代次数、碰撞检测结果)同步到debug_instance_调试信息中,用于可视化工具分析
const auto& publishable_trajectory = frame_->open_space_info().publishable_trajectory_data().first;// 存储经过平滑处理后的轨迹数据,包含位置、速度、曲率等参数,由DL-IAPS算法生成 的最终轨迹点序列。
const auto& publishable_trajectory_gear = frame_->open_space_info().publishable_trajectory_data().second; //车辆档位状态(前进/倒车),这在泊车场景中频繁切换
const auto& trajectory_type = frame_->open_space_info().trajectory_type(); //设置轨迹类型 OPEN_SPACE
const auto& is_collision = frame_->open_space_info().is_collision(); //碰撞检测标记,若为 true 将触发紧急制动或路径重规划
// 将轨迹数据结构序列化为 Protobuf 格式,用于跨模块通信
publishable_trajectory.PopulateTrajectoryProtobuf(ptr_trajectory_pb);
ptr_trajectory_pb->set_gear(publishable_trajectory_gear); // set_gear()设置R档/D档,适应倒车入库等需求
ptr_trajectory_pb->set_trajectory_type(trajectory_type);//设置trajectory_type区分泊入、泊出等子场景 倒车入库:设置为GEAR_REVERSE,激活后轮转向控制逻辑 前进泊出:保持GEAR_DRIVE,匹配常规控制策略
ptr_trajectory_pb->set_is_collision(is_collision); // is_collision标志触发紧急制动或重新规划
// TODO(QiL): refine engage advice in open space trajectory optimizer. 在开放空间轨迹优化器中优化参与建议
auto* engage_advice = ptr_trajectory_pb->mutable_engage_advice();
// enable start auto from open_space planner.人机交互建议
if (injector_->vehicle_state()->vehicle_state().driving_mode() !=
Chassis::DrivingMode::Chassis_DrivingMode_COMPLETE_AUTO_DRIVE) {
engage_advice->set_advice(EngageAdvice::READY_TO_ENGAGE); // 提示READY_TO_ENGAGE,要求用户准备接管(如泊车开始前的确认)
engage_advice->set_reason("Ready to engage when staring with OPEN_SPACE_PLANNER");// 状态说明
} else {
engage_advice->set_advice(EngageAdvice::KEEP_ENGAGED);// 维持KEEP_ENGAGED,确保系统持续控制
engage_advice->set_reason("Keep engage while in parking");
}
// TODO(QiL): refine the export decision in open space info
// 标记当前主决策为“泊车中”,通知控制模块启用低速控制策略(如限制最大速度、增加制动灵敏度)
ptr_trajectory_pb->mutable_decision()
->mutable_main_decision()
->mutable_parking()
->set_status(MainParking::IN_PARKING);
if (FLAGS_enable_record_debug) {
// ptr_debug->MergeFrom(frame_->open_space_info().debug_instance());
frame_->mutable_open_space_info()->RecordDebug(ptr_debug);
ADEBUG << "Open space debug information added!";
// call open space info load debug
// TODO(Runxin): create a new flag to enable openspace chart
ExportOpenSpaceChart(ptr_trajectory_pb->debug(), *ptr_trajectory_pb,
ptr_debug);
}
} else { //常规马路
// FindDriveReferenceLineInfo():从Frame对象中获取当前最优驾驶参考线信息,cost已经计算碗了,只需要选择最小即可
const auto* best_ref_info = frame_->FindDriveReferenceLineInfo();
// FindTargetReferenceLineInfo():在变道场景下获取目标车道的参考线,用于长周期决策
const auto* target_ref_info = frame_->FindTargetReferenceLineInfo();
if (!best_ref_info) { //当无有效参考线时,清空历史轨迹并返回PLANNING_ERROR,触发停车
const std::string msg = "planner failed to make a driving plan";
AERROR << msg;
if (last_publishable_trajectory_) {
last_publishable_trajectory_->Clear();
}
return Status(ErrorCode::PLANNING_ERROR, msg);
}
// Store current frame stitched path for possible speed fallback in next
// frames 将历史轨迹与当前参考线路径(best_ref_path)拼接,确保控制模块的轨迹连续性
DiscretizedPath current_frame_planned_path;
// stitching_trajectory:历史轨迹的末端点,用于与当前规划路径平滑衔接,避免急转向
for (const auto& trajectory_point : stitching_trajectory) {
current_frame_planned_path.push_back(trajectory_point.path_point());
}
//best_ref_path:最优参考线,通过std::copy合并至规划路径 规划的轨迹拼接最有参考线,确保轨迹连续性
const auto& best_ref_path = best_ref_info->path_data().discretized_path();
std::copy(best_ref_path.begin() + 1, best_ref_path.end(),
std::back_inserter(current_frame_planned_path));
frame_->set_current_frame_planned_path(current_frame_planned_path);
// 调试信息整合
ptr_debug->MergeFrom(best_ref_info->debug());
// 调试图表导出控制
if (FLAGS_export_chart) {
ExportOnLaneChart(best_ref_info->debug(), ptr_debug);
} else {
ExportReferenceLineDebug(ptr_debug);
// Export additional ST-chart for failed lane-change speed planning
const auto* failed_ref_info = frame_->FindFailedReferenceLineInfo();
if (failed_ref_info) {
ExportFailedLaneChangeSTChart(failed_ref_info->debug(), ptr_debug);
}
}
// latency_stats:记录各子模块耗时(如参考线生成、路径优化、速度决策)。
ptr_trajectory_pb->mutable_latency_stats()->MergeFrom(best_ref_info->latency_stats());
// set right of way status
ptr_trajectory_pb->set_right_of_way_status(best_ref_info->GetRightOfWayStatus());
// 车道级导航信息传递
for (const auto& id : best_ref_info->TargetLaneId()) { // lane_id:当前参考线关联的车道ID序列,用于HMI显示车道保持状态。
ptr_trajectory_pb->add_lane_id()->CopyFrom(id);
}
for (const auto& id : target_ref_info->TargetLaneId()) {// target_lane_id:目标参考线的车道ID(变道场景下显示目标车道)。
ptr_trajectory_pb->add_target_lane_id()->CopyFrom(id);
}
// 轨迹类型标识 NORMAL:正常车道跟随。 LANE_CHANGE:执行变道动作。 PARKING:泊车场景轨迹。
ptr_trajectory_pb->set_trajectory_type(best_ref_info->trajectory_type());
if (FLAGS_enable_rss_info) { // RSS安全信息注入
*ptr_trajectory_pb->mutable_rss_info() = best_ref_info->rss_info();
}
// 决策数据导出
best_ref_info->ExportDecision(ptr_trajectory_pb->mutable_decision(), injector_->planning_context());
// Add debug information.
if (FLAGS_enable_record_debug) {
auto* reference_line = ptr_debug->mutable_planning_data()->add_path();
reference_line->set_name("planning_reference_line");
const auto& reference_points =
best_ref_info->reference_line().reference_points();
double s = 0.0;
double prev_x = 0.0;
double prev_y = 0.0;
bool empty_path = true;
for (const auto& reference_point : reference_points) {
auto* path_point = reference_line->add_path_point();
path_point->set_x(reference_point.x());
path_point->set_y(reference_point.y());
path_point->set_theta(reference_point.heading());
path_point->set_kappa(reference_point.kappa());
path_point->set_dkappa(reference_point.dkappa());
if (empty_path) {
path_point->set_s(0.0);
empty_path = false;
} else {
double dx = reference_point.x() - prev_x;
double dy = reference_point.y() - prev_y;
s += std::hypot(dx, dy);
path_point->set_s(s);
}
prev_x = reference_point.x();
prev_y = reference_point.y();
}
}
last_publishable_trajectory_.reset(new PublishableTrajectory(
current_time_stamp, best_ref_info->trajectory()));
PrintCurves debug_traj;
for (size_t i = 0; i < last_publishable_trajectory_->size(); i++) {
auto& traj_pt = last_publishable_trajectory_->at(i);
debug_traj.AddPoint("traj_sv", traj_pt.path_point().s(), traj_pt.v());
debug_traj.AddPoint("traj_sa", traj_pt.path_point().s(), traj_pt.a());
debug_traj.AddPoint("traj_sk", traj_pt.path_point().s(),
traj_pt.path_point().kappa());
}
// debug_traj.PrintToLog();
ADEBUG << "current_time_stamp: " << current_time_stamp;
last_publishable_trajectory_->PrependTrajectoryPoints(
std::vector<TrajectoryPoint>(stitching_trajectory.begin(),
stitching_trajectory.end() - 1));
// 将轨迹数据转换为 Protobuf 格式
last_publishable_trajectory_->PopulateTrajectoryProtobuf(ptr_trajectory_pb);
best_ref_info->ExportEngageAdvice(
ptr_trajectory_pb->mutable_engage_advice(),
injector_->planning_context());
}
return status;
}


















 754
754

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











