






- 🍨 本文为🔗365天深度学习训练营 中的学习记录博客
- 🍖 原作者:K同学啊 | 接辅导、项目定制
往期内容
深度学习第一周:单通道图像——MNIST手写数字识别
深度学习第二周:多通道图像——CIFAR10彩色图片识别
一、 前期准备
数据:🔗百度网盘(提取码:hqij )
1. 设置GPU
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
import torchvision
# 设置硬件设备,如果有GPU则使用,没有则使用cpu
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
Output:
device(type='cuda') #代表使用的是GPU
2. 设置随机种子
为了保证实验可以复现,我们通过随机种子控制随机数的生成。
import random
import numpy as np
def setup_seed(seed):
torch.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
np.random.seed(seed)
random.seed(seed)
torch.backends.cudnn.deterministic = True
# 设置随机数种子
setup_seed(2)
3. 导入数据
数据为本地数据,weather_photos 文件夹中每个文件夹代表了一个类别。我们首先通过文件夹名称,查看数据的类别信息。
data_dir = './data/weather_photos/'
data_dir = pathlib.Path(data_dir)
data_paths = list(data_dir.glob('*'))
classeNames = [str(path).split("\\")[2] for path in data_paths]
classeNames
['cloudy', 'rain', 'shine', 'sunrise']
pathlib.Path(data_dir):它将data_dir字符串转换成一个Path对象。这个对象代表了文件系统中的具体路径,无论这个路径是否真实存在。data_dir.glob('*'):生成一个迭代器。这个迭代器遍历与指定模式匹配的所有路径。当前模式是'*',意味着它会匹配data_dir目录下的所有文件和子目录,不论它们的名字是什么。.split("\\"):这个方法用于分割路径字符串,使用反斜杠(\)作为分隔符。在Windows操作系统中,路径通常使用反斜杠作为目录分隔符。注意,由于反斜杠在Python字符串中用作转义字符,因此需要双写(即"\")以表示字面上的反斜杠字符。
import matplotlib.pyplot as plt
from PIL import Image
# 指定图像文件夹路径
image_folder = './data/weather_photos/cloudy/'
# 获取文件夹中的所有图像文件
image_files = [f for f in os.listdir(image_folder) if f.endswith((".jpg", ".png", ".jpeg"))]
#os.listdir(image_folder)文件夹中所有文件
# 创建Matplotlib图像
fig, axes = plt.subplots(3, 8, figsize=(16, 6))
# 使用列表推导式加载和显示图像
for ax, img_file in zip(axes.flat, image_files):
# axes.flat是一个迭代器,它按行优先的顺序迭代axes数组中的每个元素(即子图)
# zip:将两个迭代器组合到一起
img_path = os.path.join(image_folder, img_file) #将两块string组合成path
img = Image.open(img_path) #根据img_path打开图片
ax.imshow(img)
ax.axis('off')
# 显示图像
plt.tight_layout()
plt.show()

os.listdir(image_folder):生成迭代器,获取image_folder文件夹下所有的文件名。- .
endswith((".jpg", ".png", ".jpeg")):只获取结尾为".jpg", ".png", ".jpeg"的文件。 axes.flat:是一个迭代器,它按行优先的顺序迭代axes数组中的每个元素(即子图)。zip:将两个迭代器组合到一起。
对数据进行预处理,
total_datadir = './data/weather_photos/'
train_transforms = transforms.Compose([
transforms.Resize([224, 224]), # 将输入图片resize成统一尺寸
transforms.ToTensor(), # 将PIL Image或numpy.ndarray转换为tensor,并归一化到[0,1]之间
transforms.Normalize( # 标准化处理-->转换为标准正太分布(高斯分布),使模型更容易收敛
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]) # mean, std 三通道值是从imagenet训练集中抽样算出来的
])
total_data = datasets.ImageFolder(total_datadir,transform=train_transforms)
# 这是一个用于加载图像数据的类。这个类预期数据以一种特定的文件夹结构组织,即数据集的每个类别都有自己的文件夹,文件夹名为类别名,文件夹内包含属于该类别的所有图像。
total_data
datasets.ImageFolder:torchvision.datasets.ImageFolder是PyTorch提供的一个类,它用于处理那些目录结构按类别组织的图像数据集。每个类的图像应存储在各自的子目录中。ImageFolder自动将这些子目录的名称作为类标签。mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]:mean, std 三通道值是从imagenet训练集中抽样算出来的。
4. 划分数据集
train_size = int(0.8 * len(total_data))
test_size = len(total_data) - train_size
train_dataset, test_dataset = torch.utils.data.random_split(total_data, [train_size, test_size])
train_dataset, test_dataset
torch.utils.data.random_split: 这是PyTorch提供的一个功能,用于将给定的数据集随机分割成非重叠的新数据集组。它接收至少两个参数:total_data是要被分割的数据集,[train_size, test_size]是一个整数列表,列表中的每个整数定义了返回的每个分割中的数据点数量。
通过 torch.utils.data.DataLoader 设置 Loader,
batch_size = 32
train_dl = torch.utils.data.DataLoader(train_dataset,
batch_size=batch_size,
shuffle=True,
# worker_init_fn=setup_seed(1),
num_workers=2)
test_dl = torch.utils.data.DataLoader(test_dataset,
batch_size=batch_size,
shuffle=True,
# worker_init_fn=setup_seed(1), # 用于设置每个worker的随机种子
num_workers=2) # num_workers的经验设置值是自己电脑/服务器的CPU核心数
num_workers=2: 这个参数设置了用于数据加载的子进程数。增加num_workers的数量可以提高数据加载的速度,特别是当数据集比较大或者数据预处理比较耗时时。设置为2意味着会有两个工作进程并行读取数据。这个参数需要根据本地/服务器性能,进行灵活调整,并非越大越好。
2.构建网络
import torch.nn.functional as F
class Model(nn.Module):
def __init__(self):
super(Model, self).__init__()
"""
nn.Conv2d()函数:
第一个参数(in_channels)是输入的channel数量
第二个参数(out_channels)是输出的channel数量
第三个参数(kernel_size)是卷积核大小
第四个参数(stride)是步长,默认为1
第五个参数(padding)是填充大小,默认为0
"""
self.conv1 = nn.Conv2d(in_channels=3, out_channels=12, kernel_size=5, stride=1, padding=0)
self.bn1 = nn.BatchNorm2d(12) # 对当前batch下所有图片的同一个特征的所有通道,进行归一化
self.conv2 = nn.Conv2d(in_channels=12, out_channels=12, kernel_size=5, stride=1, padding=0)
self.bn2 = nn.BatchNorm2d(12)
self.pool1 = nn.MaxPool2d(2,2)
self.conv4 = nn.Conv2d(in_channels=12, out_channels=24, kernel_size=5, stride=1, padding=0)
self.bn4 = nn.BatchNorm2d(24)
self.conv5 = nn.Conv2d(in_channels=24, out_channels=24, kernel_size=5, stride=1, padding=0)
self.bn5 = nn.BatchNorm2d(24)
self.pool2 = nn.MaxPool2d(2,2)
self.fc1 = nn.Linear(24*50*50, len(classeNames))
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = self.pool1(x)
x = F.relu(self.bn4(self.conv4(x)))
x = F.relu(self.bn5(self.conv5(x)))
x = self.pool2(x)
x = x.view(-1, 24*50*50)
x = self.fc1(x)
return x
nn.Conv2d(input_channel, output_channel, kernel_size)CNN理论核心——卷积层,设置kernel / filter 大小和个数,用于提取数据特征。nn.MaxPool2d(2)下采样(池化),降低数据维数,表示抽象概念,传入参数为池化核大小。nn.ReLU激活函数,赋予模型拟合非线性关系的能力。nn.Linear(input_dimension, output_dimension)全连接层,相当于给数据乘以权重矩阵W,W的size由input_dimension,output_dimension和确定。- 卷积核的size为:kernel_size × kernel_size × 上一层channel,因此,卷积核维数 = 数据维数 + 1。
查看网络参数:
from torchinfo import summary
# 将模型转移到GPU中(我们模型运行均在GPU中进行)
model = Model().to(device)
summary(model)
=================================================================
Layer (type:depth-idx) Param #
=================================================================
Model --
├─Conv2d: 1-1 912
├─BatchNorm2d: 1-2 24
├─Conv2d: 1-3 3,612
├─BatchNorm2d: 1-4 24
├─MaxPool2d: 1-5 --
├─Conv2d: 1-6 7,224
├─BatchNorm2d: 1-7 48
├─Conv2d: 1-8 14,424
├─BatchNorm2d: 1-9 48
├─MaxPool2d: 1-10 --
├─Linear: 1-11 240,004
=================================================================
Total params: 266,320
Trainable params: 266,320
Non-trainable params: 0
=================================================================
三、 训练模型
1. 设置超参数
loss_fn = nn.CrossEntropyLoss() # 创建损失函数
learn_rate = 1e-4 # 学习率
opt = torch.optim.Adam(model.parameters(),lr=learn_rate)
2. 训练函数
# 训练循环
def train(dataloader, model, loss_fn, optimizer):
size = len(dataloader.dataset) # 训练集的大小,一共60000张图片
num_batches = len(dataloader) # 批次数目,1875(60000/32)
train_loss, train_acc = 0, 0 # 初始化训练损失和正确率
for X, y in dataloader: # 获取图片及其标签
X, y = X.to(device), y.to(device)
# 计算预测误差
pred = model(X) # 网络输出
loss = loss_fn(pred, y) # 计算网络输出和真实值之间的差距,targets为真实值,计算二者差值即为损失
# 反向传播
optimizer.zero_grad() # grad属性归零
loss.backward() # 反向传播
optimizer.step() # 每一步自动更新
# 记录acc与loss
train_acc += (pred.argmax(1) == y).type(torch.float).sum().item()
train_loss += loss.item()
train_acc /= size
train_loss /= num_batches
return train_acc, train_loss
optimizer.zero_grad()清空上一次的累计梯度loss.backward()根据tensor进行过的数学运算来自动计算其对应的梯度。具体来说,torch.tensor是autograd包的基础类,如果你设置tensor的requires_grads为True,就会开始跟踪这个tensor上面的所有运算,如果你做完运算后使用tensor.backward(),所有的梯度就会自动运算,tensor的梯度将会累加到它的.grad属性里面去。optimizer.step()step()函数的作用是执行一次反向传播,通过梯度下降法来更新参数的值。optimizer只负责通过梯度下降进行优化,而不负责产生梯度
3.测试函数
测试函数和训练函数大致相同,但是由于不进行梯度下降对网络权重进行更新,所以不需要传入优化器。
def test (dataloader, model, loss_fn):
size = len(dataloader.dataset) # 测试集的大小,一共10000张图片
num_batches = len(dataloader) # 批次数目,313(10000/32=312.5,向上取整)
test_loss, test_acc = 0, 0
# 当不进行训练时,停止梯度更新,节省计算内存消耗
with torch.no_grad():
for imgs, target in dataloader:
imgs, target = imgs.to(device), target.to(device)
# 计算loss
target_pred = model(imgs)
loss = loss_fn(target_pred, target)
test_loss += loss.item() #累计loss
test_acc += (target_pred.argmax(1) == target).type(torch.float).sum().item() # 累计正确个数
test_acc /= size
test_loss /= num_batches
return test_acc, test_loss
4. 正式训练
epochs = 30
train_loss = []
train_acc = []
test_loss = []
test_acc = []
import time
for epoch in range(epochs):
since_train = time.time()
model.train()
epoch_train_acc, epoch_train_loss = train(train_dl, model, loss_fn, opt)
time_train = time.time() - since_train
since_test = time.time()
model.eval()
epoch_test_acc, epoch_test_loss = test(test_dl, model, loss_fn)
time_test = time.time() - since_test
train_acc.append(epoch_train_acc)
train_loss.append(epoch_train_loss)
test_acc.append(epoch_test_acc)
test_loss.append(epoch_test_loss)
template = ('Epoch:{:2d}, Train_acc:{:.1f}%, Train_loss:{:.3f}, Test_acc:{:.1f}%,Test_loss:{:.3f},Train_Time:{:.3f},Test_Time:{:.3f}')
print(template.format(epoch+1, epoch_train_acc*100, epoch_train_loss, epoch_test_acc*100, epoch_test_loss, time_train, time_test))
print('Done')
Epoch: 1, Train_acc:70.8%, Train_loss:0.829, Test_acc:62.7%,Test_loss:0.799,Train_Time:11.334,Test_Time:2.139
Epoch: 2, Train_acc:89.9%, Train_loss:0.317, Test_acc:87.6%,Test_loss:0.379,Train_Time:3.914,Test_Time:2.089
Epoch: 3, Train_acc:89.0%, Train_loss:0.261, Test_acc:87.6%,Test_loss:0.449,Train_Time:3.956,Test_Time:2.064
Epoch: 4, Train_acc:94.4%, Train_loss:0.140, Test_acc:92.0%,Test_loss:0.483,Train_Time:3.904,Test_Time:2.082
Epoch: 5, Train_acc:95.9%, Train_loss:0.194, Test_acc:91.6%,Test_loss:0.346,Train_Time:4.098,Test_Time:2.019
Epoch: 6, Train_acc:93.1%, Train_loss:0.208, Test_acc:90.2%,Test_loss:0.324,Train_Time:3.958,Test_Time:1.998
Epoch: 7, Train_acc:96.0%, Train_loss:0.123, Test_acc:87.6%,Test_loss:0.401,Train_Time:4.253,Test_Time:2.025
Epoch: 8, Train_acc:98.6%, Train_loss:0.058, Test_acc:92.0%,Test_loss:0.377,Train_Time:4.096,Test_Time:2.047
Epoch: 9, Train_acc:98.7%, Train_loss:0.049, Test_acc:92.0%,Test_loss:0.411,Train_Time:3.961,Test_Time:2.014
Epoch:10, Train_acc:98.6%, Train_loss:0.047, Test_acc:91.6%,Test_loss:0.366,Train_Time:4.232,Test_Time:2.060
Epoch:11, Train_acc:98.7%, Train_loss:0.048, Test_acc:92.0%,Test_loss:0.350,Train_Time:4.083,Test_Time:2.053
Epoch:12, Train_acc:98.4%, Train_loss:0.043, Test_acc:90.7%,Test_loss:0.438,Train_Time:4.236,Test_Time:2.101
Epoch:13, Train_acc:98.9%, Train_loss:0.041, Test_acc:91.1%,Test_loss:1.275,Train_Time:3.824,Test_Time:2.184
Epoch:14, Train_acc:99.8%, Train_loss:0.021, Test_acc:92.0%,Test_loss:0.391,Train_Time:3.904,Test_Time:2.133
Epoch:15, Train_acc:99.8%, Train_loss:0.017, Test_acc:92.4%,Test_loss:0.358,Train_Time:4.105,Test_Time:2.086
Epoch:16, Train_acc:99.4%, Train_loss:0.033, Test_acc:92.4%,Test_loss:0.404,Train_Time:3.958,Test_Time:2.116
Epoch:17, Train_acc:99.0%, Train_loss:0.040, Test_acc:92.9%,Test_loss:0.363,Train_Time:3.829,Test_Time:2.024
Epoch:18, Train_acc:98.9%, Train_loss:0.042, Test_acc:90.2%,Test_loss:0.448,Train_Time:4.067,Test_Time:2.134
Epoch:19, Train_acc:98.8%, Train_loss:0.050, Test_acc:91.1%,Test_loss:0.406,Train_Time:3.851,Test_Time:2.055
Epoch:20, Train_acc:98.7%, Train_loss:0.041, Test_acc:91.1%,Test_loss:0.436,Train_Time:4.047,Test_Time:2.067
Epoch:21, Train_acc:99.7%, Train_loss:0.015, Test_acc:91.6%,Test_loss:0.368,Train_Time:3.974,Test_Time:2.103
Epoch:22, Train_acc:99.9%, Train_loss:0.010, Test_acc:91.6%,Test_loss:0.367,Train_Time:3.812,Test_Time:2.079
Epoch:23, Train_acc:99.9%, Train_loss:0.008, Test_acc:92.0%,Test_loss:1.187,Train_Time:3.715,Test_Time:2.234
Epoch:24, Train_acc:99.9%, Train_loss:0.007, Test_acc:92.0%,Test_loss:0.357,Train_Time:4.020,Test_Time:2.020
Epoch:25, Train_acc:99.9%, Train_loss:0.005, Test_acc:92.0%,Test_loss:0.406,Train_Time:3.939,Test_Time:2.106
Epoch:26, Train_acc:99.4%, Train_loss:0.038, Test_acc:91.1%,Test_loss:0.360,Train_Time:3.965,Test_Time:2.092
Epoch:27, Train_acc:96.1%, Train_loss:0.123, Test_acc:90.7%,Test_loss:0.421,Train_Time:3.927,Test_Time:2.182
Epoch:28, Train_acc:99.4%, Train_loss:0.017, Test_acc:91.6%,Test_loss:0.404,Train_Time:3.834,Test_Time:2.085
Epoch:29, Train_acc:99.6%, Train_loss:0.013, Test_acc:92.4%,Test_loss:0.358,Train_Time:3.831,Test_Time:2.095
Epoch:30, Train_acc:99.7%, Train_loss:0.022, Test_acc:91.1%,Test_loss:1.242,Train_Time:3.758,Test_Time:2.129
Done
model.train()的作用是启用 Batch Normalization 和 Dropout。model.eval()的作用是关闭 Batch Normalization 和 Dropout。Normalization部分是调用training set中的方差和均值进行。Dropout部分不需要,Dropout部分只是帮助模型训练,防止过拟合。因此我们直接调用模型训练好的参数即可。
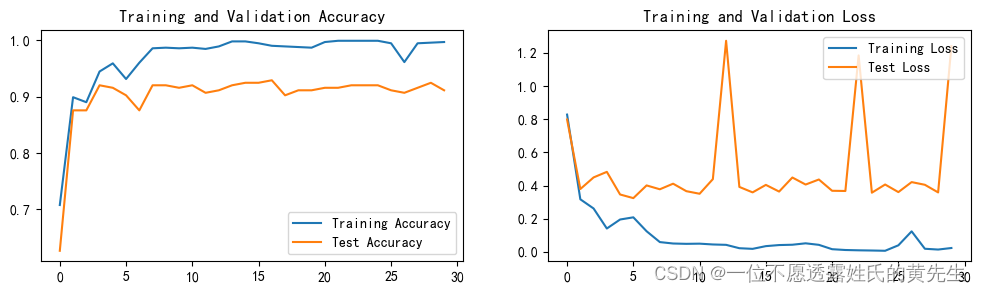
四、 结果可视化
import matplotlib.pyplot as plt
#隐藏警告
import warnings
warnings.filterwarnings("ignore") #忽略警告信息
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
plt.rcParams['figure.dpi'] = 100 #分辨率
epochs_range = range(epochs)
plt.figure(figsize=(12, 3))
plt.subplot(1, 2, 1)
plt.plot(epochs_range, train_acc, label='Training Accuracy')
plt.plot(epochs_range, test_acc, label='Test Accuracy')
plt.legend(loc='lower right')
plt.title('Training and Validation Accuracy')
plt.subplot(1, 2, 2)
plt.plot(epochs_range, train_loss, label='Training Loss')
plt.plot(epochs_range, test_loss, label='Test Loss')
plt.legend(loc='upper right')
plt.title('Training and Validation Loss')
plt.show()
个人总结
对于本地数据,我们只需要利用datasets.ImageFolder将其转化,再利用torch.utils.data.random_split进行划分,最后使用torch.utils.data.DataLoader转化为DataLoader即可。
















 840
840











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









