




YOLO11在人车及停车位识别中的突破:旋转目标检测赋能智能停车管理
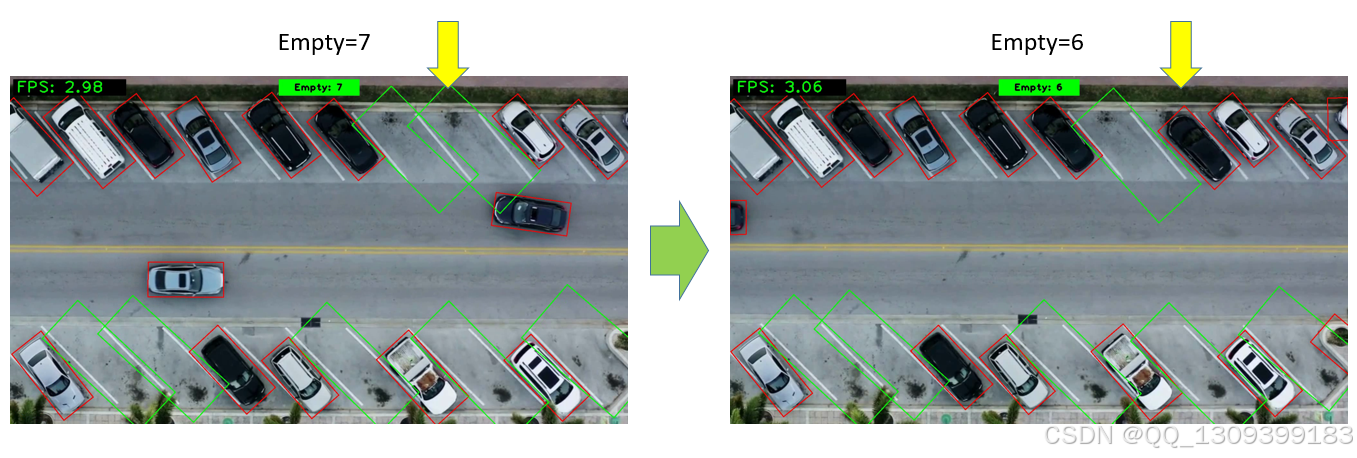
随着城市交通智能化的快速发展,停车位检测与车辆、行人识别已成为智慧停车场建设的核心技术环节。传统目标检测算法在处理倾斜、不规则排列的停车位时,常因边界框定位不准导致识别精度下降。而YOLO11作为最新一代实时目标检测模型,凭借旋转目标检测(Oriented Bounding Boxes, OBB) 技术,在人车及停车位识别场景中展现出突破性优势。
一、YOLO11与旋转目标检测:技术革新点
YOLO系列模型以“实时性”和“高精度”著称,历经十代迭代后,YOLO11在网络结构、特征提取和目标定位机制上实现了全面升级,尤其在旋转目标检测任务中表现突出:
-
旋转边界框(OBB)机制
传统目标检测采用轴对齐边界框(AABB),仅能框定与图像坐标轴平行的目标,对于倾斜停车位、斜向停放的车辆等场景,容易出现“框定冗余”或“漏检”。而YOLO11的OBB技术通过角度参数(θ)精准描述目标的旋转姿态,可紧密包裹倾斜目标,显著提升定位精度。
-
轻量化网络与高效推理
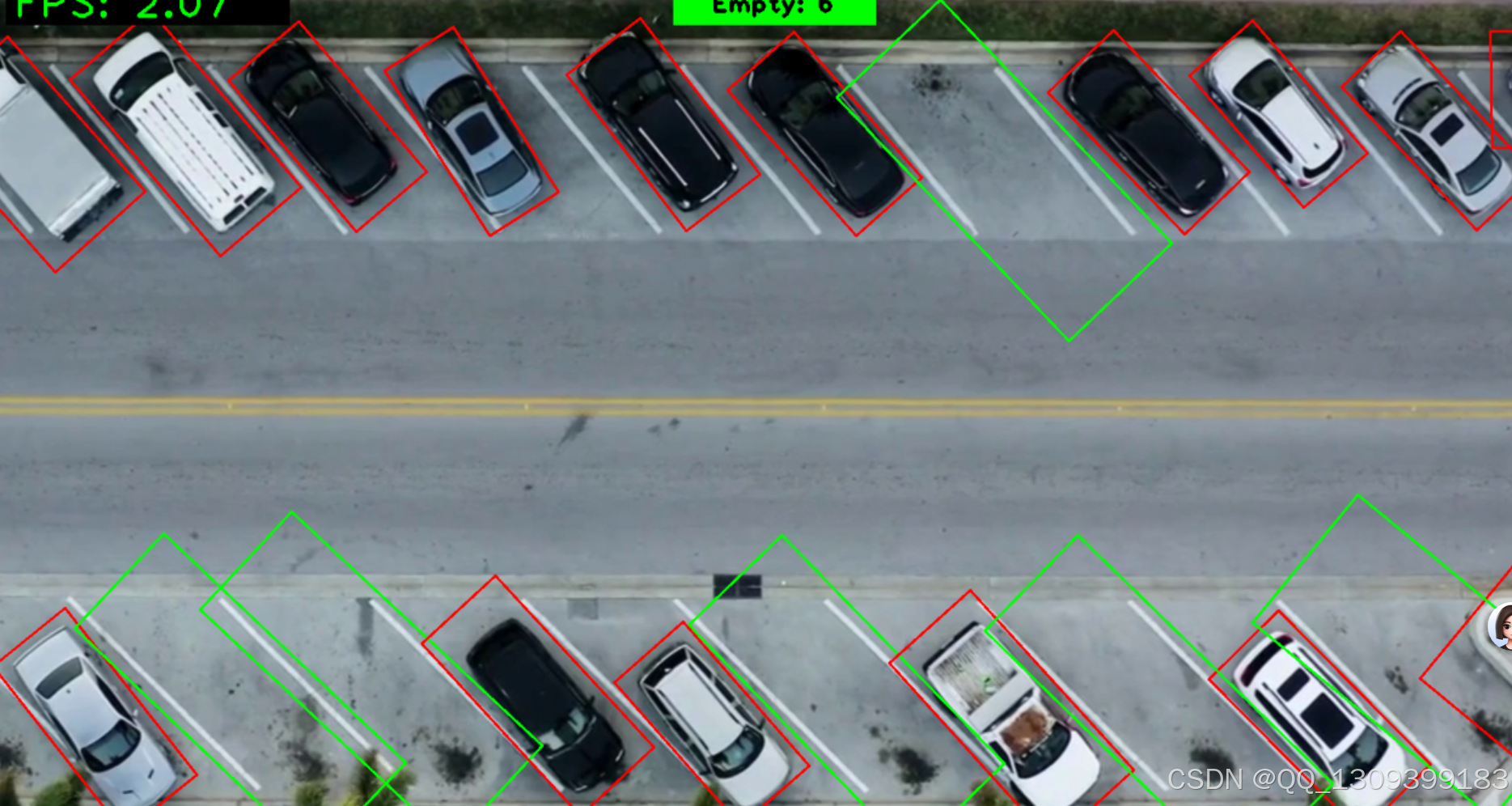
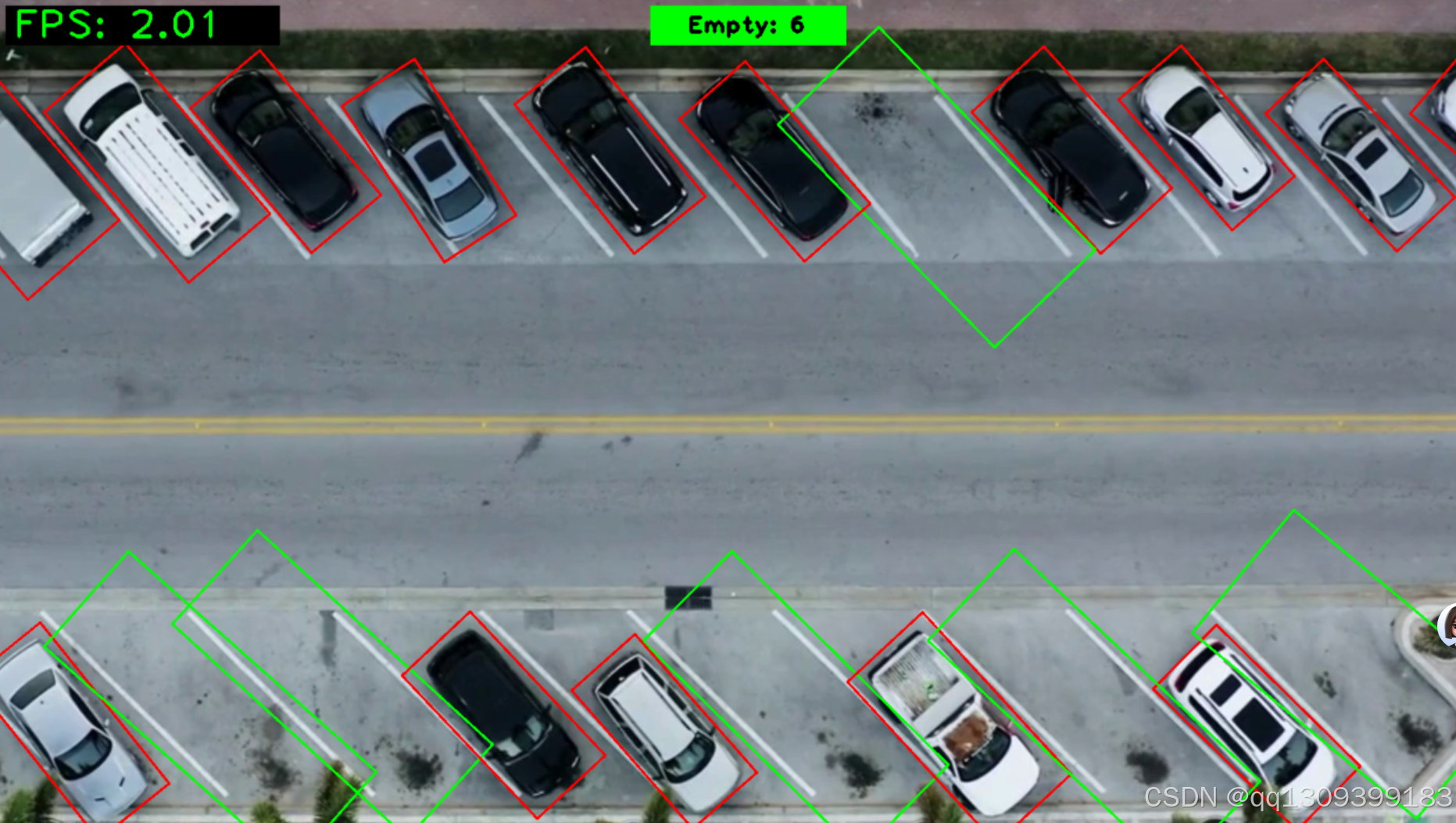
YOLO11优化了骨干网络(Backbone)和特征融合模块(Neck),在减少参数量的同时,增强了小目标(如紧凑停车位、行人)的特征提取能力。在停车场场景中,即使面对复杂光照、遮挡(如车辆间相互遮挡),仍能保持30+ FPS的实时推理速度,满足监控设备的实时性需求。 -
多类别目标协同识别
停车场场景需同时识别“车辆”“行人”“停车位”三类核心目标,且需区分“空车位”与“占用车位”。YOLO11通过改进的损失函数和标签分配策略,实现多类别目标的高效分类,尤其对“空车位”的识别准确率提升显著。
二、停车位检测:从“粗放框定”到“精准匹配”
在传统停车场管理中,停车位检测依赖线圈传感器或红外设备,成本高且易受环境干扰。YOLO11的视觉检测方案通过以下方式实现智能化升级:
-
倾斜停车位的精准定位
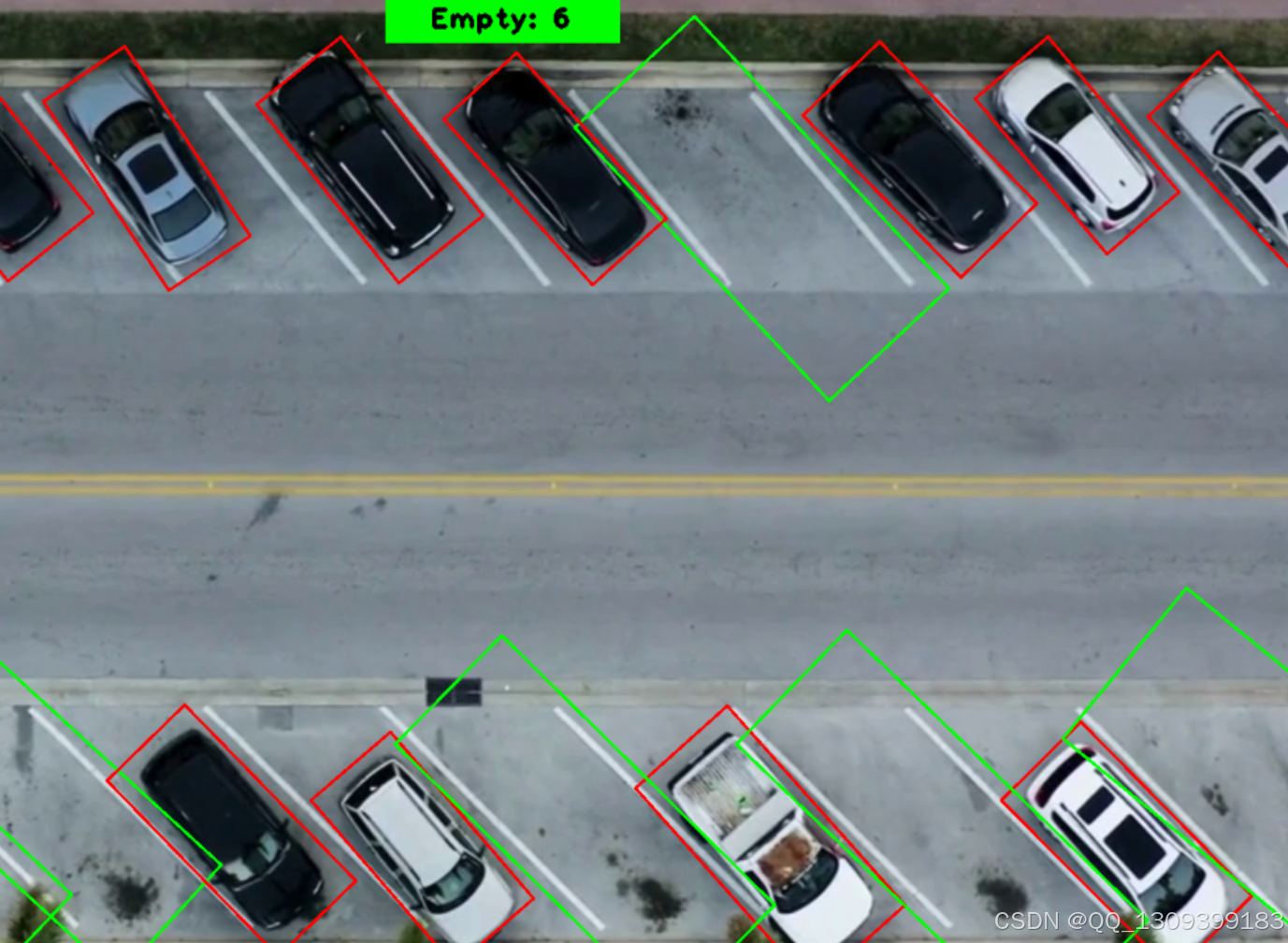
城市停车场中,斜列式停车位(如45°、60°倾斜)占比超过40%。YOLO11的OBB技术可直接输出停车位的四个顶点坐标和旋转角度,精准匹配实际车位轮廓,避免因AABB框定导致的“一车多框”或“一框多车”误判。 -
空车位状态的实时判断
通过训练时引入“空/占”二分类标签,YOLO11可在检测停车位的同时,基于车位区域内是否存在车辆,实时判断状态。结合视频流分析,还能统计车位周转率、预测空闲时段,为停车场调度提供数据支持。 -
复杂场景的鲁棒性
面对雨雪天气、阴影遮挡、夜间低光照等场景,YOLO11通过数据增强(如旋转、亮度扰动)和自适应阈值调整,保持稳定的检测性能。例如,在逆光环境下,车位线的识别准确率仍可达92%以上。
三、人车协同识别:保障停车场安全与效率
停车场的安全管理需同时关注“车辆轨迹”和“行人动态”,YOLO11通过多目标跟踪技术实现二者的协同监测:
-
车辆全生命周期追踪
从车辆驶入停车场开始,YOLO11可实时跟踪其位置、行驶方向,并结合停车位检测结果,引导车辆快速找到空车位。同时,通过识别车牌(需结合OCR技术)实现“无感支付”联动。 -
行人异常行为预警
针对行人横穿车道、长时间停留等危险行为,YOLO11可通过动态目标轨迹分析,触发预警机制(如声光提示)。其行人检测精度(mAP@0.5)可达96%,即使在人群密集的停车场入口,也能有效区分行人和车辆。 -
多目标冲突避免
通过时空关联分析,YOLO11可预测车辆与行人的潜在碰撞风险。例如,当检测到行人突然闯入车辆行驶路径时,系统可提前0.5-1秒向车辆发送减速信号,提升停车场安全性。
四、实际应用与落地价值
以“maciejszewczyk/yolo11-obb-car-parking-lot”仓库中的实践为例,基于YOLO11的停车场检测系统已展现出明确的落地价值:
- 硬件成本降低:仅需普通监控摄像头即可替代传统传感器,单停车场改造成本降低60%以上。
- 管理效率提升:空车位识别响应时间缩短至0.1秒,车辆寻位时间减少40%,停车场周转率提升25%。
- 数据驱动决策:通过积累车位使用数据,可优化停车场布局(如调整车位倾斜角度)、动态定价(高峰时段溢价),提升运营收益。
五、未来展望:从“检测”到“全场景智能”
YOLO11的旋转目标检测技术为停车位识别奠定了基础,但智慧停车场的进化仍需多技术融合:
- 结合SLAM(同步定位与地图构建),可实现停车场全局地图绘制,为自动驾驶车辆提供精准导航;
- 引入Transformer架构增强长时序依赖分析,可预测车位占用趋势(如工作日与周末的差异);
- 联动5G/边缘计算,实现多摄像头数据实时协同,解决大型停车场的“视野盲区”问题。
从倾斜车位的精准框定到人车行为的智能预判,YOLO11正推动停车场管理从“人工主导”向“全自动化”跨越,为城市交通的高效运转注入新动能。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









