







摘要:本文介绍舵机的使用方法
在前面介绍TT马达的时候,提到过舵机。舵机是一种精密控制类电动机,也是电动机的一种,它的主要作用是旋转到某一指定位置,在机器人领域使用得相当的广泛,用来实现各种机械臂和机器人关节的运动。
下面就来了解一下舵机的工作原理。在前面知道TT马达是由电动机和减速箱组成,而舵机为了精确控制电机的旋转角度,因此,在普通马达和减速箱的基础上增加了用于测量角度的角度传感器以及控制电机旋转的控制电路。这样,控制电路在电机旋转的过程中,通过角度传感器来得到当前电机已经旋转的角度,从而保证其可以在指定的位置停止。这个角度传感器最简单的就是使用一个可调电位器来实现,通过接入电路的电阻来计算出电位器滑片所在的位置。舵机的原理图如下所示:

下图为目前在玩具、航模中最经常使用的小型舵机。不同的舵机之间的差别主要体现在齿轮材质、旋转扭矩和旋转角度的不同。

舵机齿轮的材质通常有塑料和金属两种,很明显,金属的舵机齿轮不易磨损、精准度更高一些,成本也略高,缺点是重量略重。舵机的旋转角度是指它能旋转的最大范围,通常有90度版,180度版和360度版,其中无限位器的360度版舵机是可以连续旋转的。
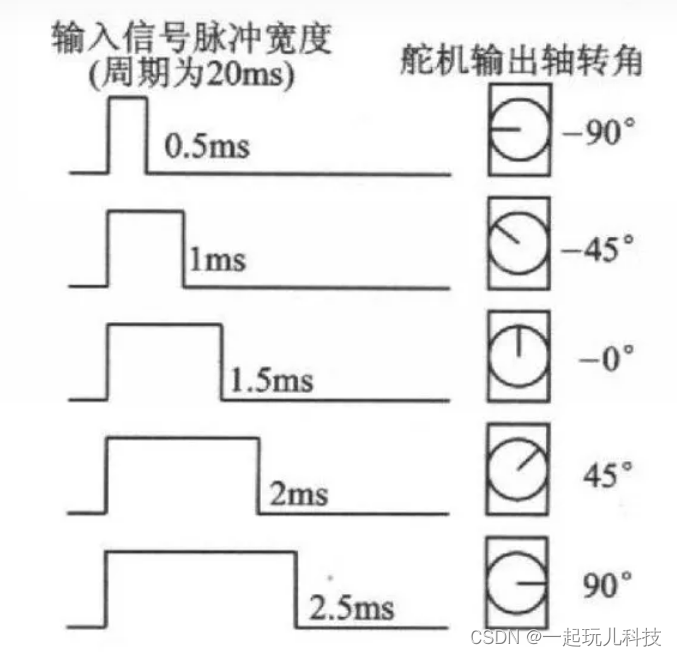
下面来了解一下是如何控制舵机工作的。控制舵机旋转需要一个20毫秒的脉冲信号,该信号的高电平部分决定着舵机旋转到哪个位置。对于180度的舵机而言,要求该脉冲信号的高电平的时长为0.5ms~2.5ms之间,对应舵机度盘的角度为0~180度,两者之间呈线性关系。也就是说,当舵机收到某个范围内的脉冲信号后,会依据该脉冲的宽度,转到相应的位置。直到下一个控制脉冲来临之前,该舵机的位置均不会发生改变。
下面,将可旋转范围的中间位置设置为0度,那么180度舵机的旋转范围就是正负90度,输入的控制脉宽与舵机的角度之间的关系如下图所示:
对于360度舵机而言,通常是无限位器的,那么360度舵机是可以连续旋转的,因此不能用一个脉冲来指定360度舵机运动到指定的位置。此时的舵机更像是一个具有闭环控制,速度稳定的减速电机。360度舵机的控制也是通过20ms的脉冲来进行控制(高电平宽度不大于2.5ms),只不过脉冲宽度的含义不同。当脉冲高电平宽度在1.5ms附近时,360度舵机停止运动,当脉冲高电平宽度大于1.5ms时,舵机为正转状态,高电平时长越长,电机转速越快。当脉冲高电平时长小于1.5ms时ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 3467
3467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











