






Anthropomorphic Muscular–Skeletal Robotic Upper Limb for Understanding Embodied Intelligence
Koh Hosoda ∗, Shunsuke Sekimoto, Yoichi Nishigori, Shinya Takamuku and Shuhei Ikemoto
Department of Multimedia Engineering, Graduate School of Information Science and Technology, Osaka University
摘要:
在本文中,我们描述了一个拟人化的肌肉骨骼机器人上肢,并重点研究了它与环境的软交互作用。通过两个实验验证了该系统的性能:动态触摸目标识别和自适应开门。第一个实验表明,柔性机器人在通过晃动对物体进行分类方面具有优势;第二个实验表明,柔性机器人在不需要精确控制的情况下也能进行开门。期望机器人具有与人相似的各向异性顺应性,可用于实现类人自适应行为。
1.介绍:
机器人和人类之间的距离正变得越来越近,不仅在物理距离上,而且在结构上也很相似。这样的机器人应该是软的,在几个意义上:他们应该有依从性,允许与人类软接触,他们应该有类似的结构依从性,使人类容易理解他们的运动,他们的行为应该是适应软件。软机器人技术的目标是通过使用机器人技术来研究这种柔软性对自适应行为的贡献。
最近,许多类人机器人的目标是与人类共享日常环境(如东京大学[1]和HRP2-JSK和来自ATR[2])。这些机器人本质上是硬的,因为它们由刚性的金属/塑料部件组成,由带有齿轮的电动马达驱动。虽然当基于力/扭矩反馈的主动顺应控制应用时,它们可以是软的,但运动将受到机械系统[3]带宽的限制,并且将是昂贵的计算。Pfeifer和Bongard[4]认为这种庞大的计算可以用机械顺应性来代替,这是软机器人的原始思想之一。
有几个层次来介绍机器人的机械顺应性。柔软的皮肤使与环境的接触更加舒适。通过引入串联弹性来实现人与机器人的自然交互,采用可变柔度的执行器正受到越来越多的关注[3,5]。由人造软肌肉驱动的肌腱机制是理解人体结构顺应性对智能的作用的一种解决方案。使用电动机[6,7]和气动肌肉[8 11]实现拟人化的肌骨骼臂机器人的试验有很多。这些研究主要集中在运动控制方面,较少关注利用身体顺应性实现与环境的交互任务。这种顺从的语言被认为是体现智能[4]的关键。
本文开发了一种拟人化的单肢肌肉骨骼机器人,重点研究了人体在感知和动作方面的顺应性:利用人体顺应性,通过动态触摸和开门行为来展示其对物体的识别能力。首先,为了证明结构顺应性如何有助于传感,我们通过动态触摸来进行物体识别。动态触摸是人在与物体发生动态交互作用时产生的本体感受和触觉感受,如触摸、敲打和晃动[12]。从感觉中,人类可以获得关于对象动力学的信息,并利用它进行分类。这方面的研究越来越多,近年来对机器人的动态触摸进行了一些研究。Suzuki等人的研究表明,带关节扭矩传感器的机器人可以区分不同长度[13]的气缸。Bergquist等人证明,机器人可以通过举起、摇晃、掉落、碰撞和推[14]来区分几个物体。Takamuku等人证明,当机器人晃动物体[15]时,听觉信息可能是分类的关键。Saal等人证明触觉传感器通过摇动[16]进行分类是有效的。Sinapov和Stoychev开发了一个机器人系统,带有关节扭矩和听觉传感器,可以根据自组织地图[17]对物体进行分类。Suzuki等人开发了一个基于视觉、力和听觉传感器[18]选择适当动作对物体进行分类的系统。然而,在现有的工作中,他们使用了不兼容的机器人。如果机器人是柔性的,则体物耦合系统的机械特征频率相对较低。因此,不需要额外的专门探测目标的传感器,机器人的固有感受器就可以观察到共振频率。更有趣的一点是,机器人可以通过改变身体的顺应性来调节观察的灵敏度。机器人可以从感知中获得物体的动态信息,并利用这些信息进行分类。
其次,为了证明顺应性对适应性行为的贡献,我们利用拟人化机械臂进行了开门实验。通常,对于硬机器人来说,开门的任务是非常困难的:它应该生成一个轨迹来开门并跟踪它,而它是由精确的力控制的(例如,Ref.[19])。然而,对人类来说,打开一扇门似乎是一项简单的任务,因为他们可以利用身体的顺应性。如果机器人的结构与人相似,那么这项任务对它来说应该是容易的。如上所述,现有的肌肉骨骼机器人[8 11]并没有执行与环境的交互任务,尽管顺从机器人有利于完成这些任务。
本文组织如下。首先描述了由骨骼、人造肌肉和柔软皮肤组成的仿人形机器人上肢的设计。然后,通过晃动目标来展示目标识别能力。最后,我们证明了机器人在不需要精确控制的情况下,利用它的顺应性可以非常平稳地开门。我们认为,知觉和行动的这两个结果显示了类人化身在人类环境中的作用,这将是理解人类智能的关键。
2.拟人化机器人上肢的设计与特点
为了调查身体顺应性对智能行为的贡献,我们开发了一个拟人化的机器人上肢(图1)。该肢体包括肩膀、上臂、肘部、前臂、手腕和手。肩部有一个由9块人造肌肉驱动的球关节(图2a)。肘部有一个由一对肌肉驱动的旋转关节(图2b)。前臂由桡骨和尺骨两根骨骼组成,由两块扭曲的肌肉(旋前和脊柱)带动。手腕有一个椭圆形的球体关节,由四块肌肉驱动。由于关节为椭圆形球体,所述手不能沿臂的纵向旋转;因此腕部有2个do.f,而上肢的上臂部分总共有7个自由度。

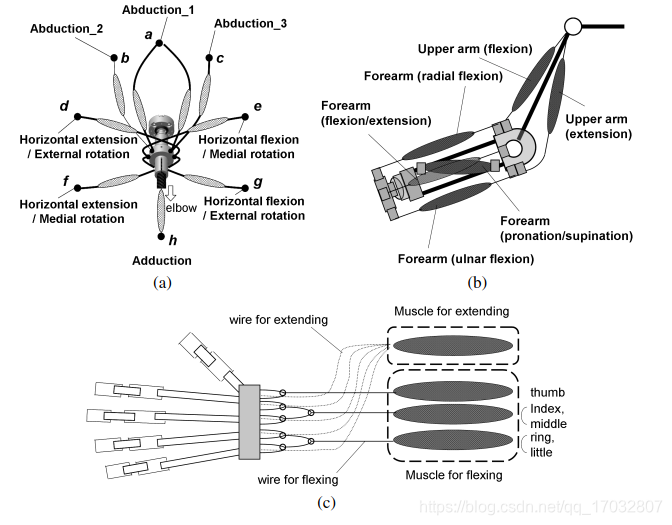
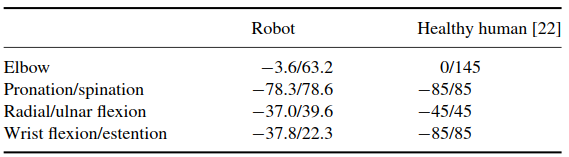
由于人造肌肉的收缩率高达30%,而放置人造肌肉的空间有限,我们不得不设计比人工手臂稍大一点的手臂这样它就能像人一样运动了。因此,这只手臂的总长度约为0.85米,总重量约为3.5公斤,分别是人的1.5倍。它能举起约2公斤的重量,但这取决于手臂的结构。在表1中,我们展示了与人相比实现的运动范围。
这只手有五个手指,每个手指都由电线驱动。它是仿生手的简化版本[20,21]。我们减少了驱动器的数量,因为我们没有足够的空间在手臂上放置许多人造肌肉。手由四块肌肉驱动——一块用于伸展,三块用于弯曲手指(图2c)。
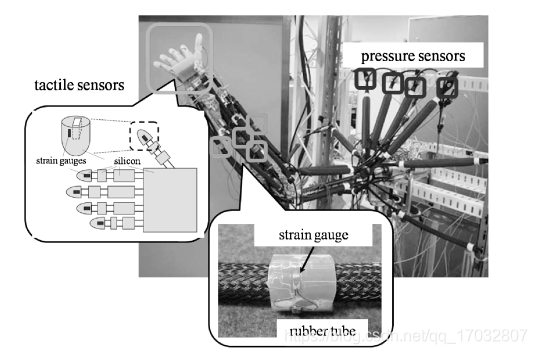
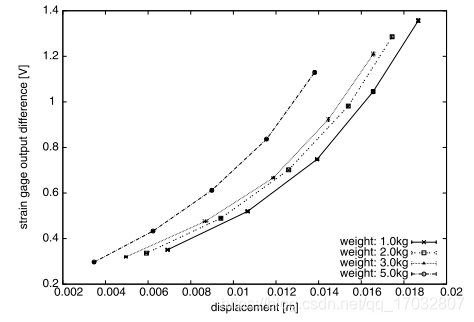
这个机器人有几种感应方式。我们将本体感受传感器和触觉传感器嵌入到肢体(图3)。作为本体感受传感器,我们通常使用关节传感器,如光学编码器。然而,由于肢体具有拟人化的球状关节,我们无法采用传统的关节角度传感器。作为本体传感器,我们采用两种类型的传感器:压力传感器和染色计。它们各有利弊:压力传感器很容易安装在肌肉上,但与肌肉的长度没有很强的相关性。应变片可以感知到与肌肉长度有一定关系的肌肉膨胀(测量应变片输出与肌肉位移的关系如图4所示),但很难稳定地放在肌肉上。由于肌肉的状态是由三分之二的测量压力,长度和力[23]来观察的,我们必须在每块肌肉上放置压力和应变传感器来观察手臂的所有状态。但是在这个实验中,我们减少了传感器的数量,因为我们的目的不是估计手臂的所有状态,而是用它来实现分类任务。
3.基于动态触摸的对象识别
3.1动态触摸
为了证明结构顺应性如何有助于传感,我们进行了动态触摸的对象识别实验。我们准备了装满不同材料的塑料瓶:水,油,粉末(面粉),沙子(颗粒大小:1mm)和石料(粒度:10mm)。我们也有重量品种- 100,125和150克,每种材料(比如15种不同的震动物体)。
因为肢体有很多缺陷。,机器人可以用许多不同的方式晃动物体。在这篇文章中,我们不探讨各种各样的震动模式,但集中在简单的模式:垂直和水平晃动物体。震动频率分别为0.75、1和1.25 Hz。假肢总共以六种方式晃动物体。我们对每一个物体进行了五次实验试验,每种震动模式(即共480次测试)。
3.2来自传感器的原始测量
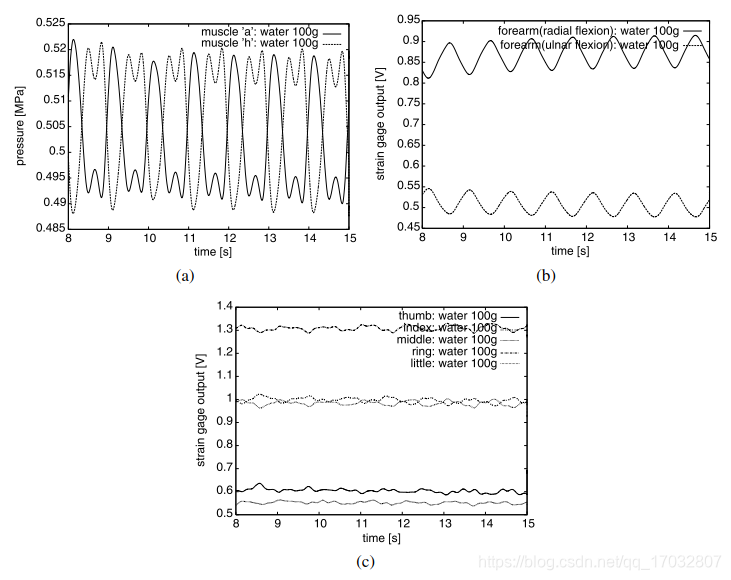
在图6中,我们显示了传感器的原始测量数据,当肢体以1赫兹水平摇动装有100克水的瓶子时。从图6中可以看出,机器人通过压力传感器和应变片都可以感知包括谐波振荡在内的谐振。注意,从一个肌肉的感觉阶段是完全相反的拮抗肌肉。
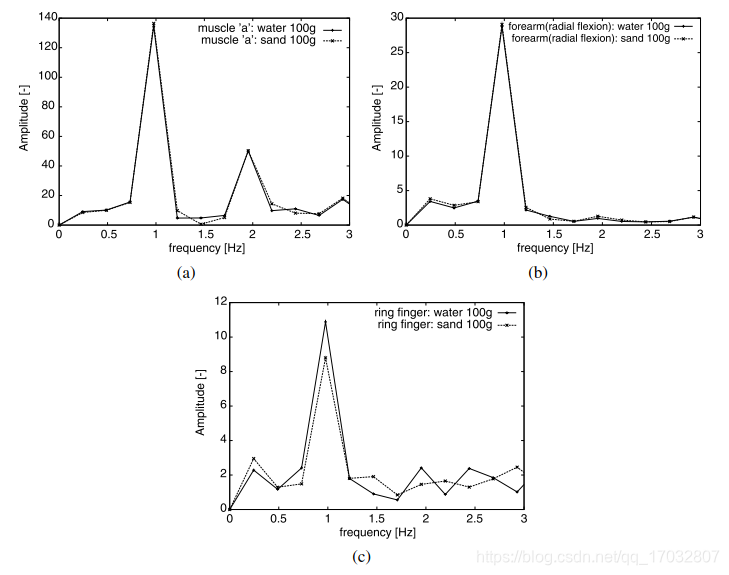
采用快速傅里叶变换(FFT)对原始数据进行分析。采样率为2 ms,使用2048个数据点(即2048个数据点)。结果如图7所示。在图7中,第一个峰值来自于翼的强迫振荡:1hz。我们也可以在图7中观察到谐波振荡的整数倍。为了表征传感器的响应,我们选取了FFT结果的前两个峰值。我们可以得到22个值,11个传感器的共振频率的两个峰值(五个触觉传感器在手,两个应变计和四个压力传感器在肌肉)。由于原始数据维数过高,我们采用主成分分析(PCA)进行分类。在本文中,我们使用两个分量。
3.3分类结果
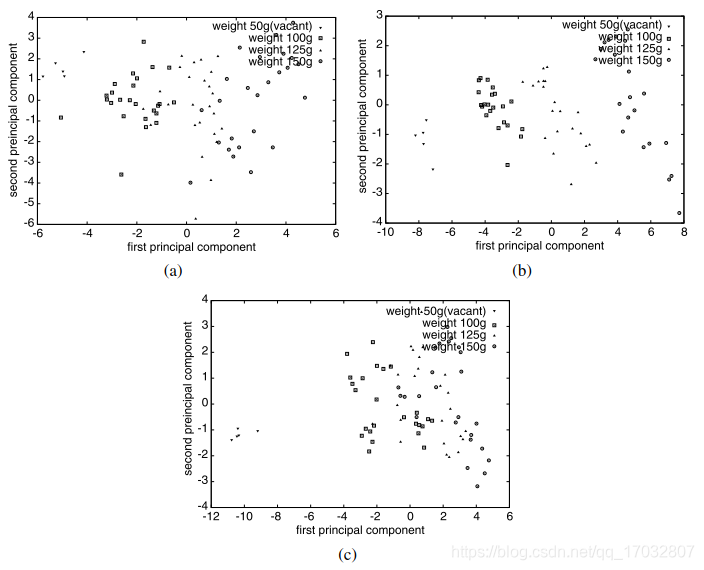
首先,我们关注体重。图8显示了不同频率下垂直振动的主成分分析结果。图8显示,不管瓶子里装的是什么,当机器人以1赫兹的频率垂直摇动瓶子时,它都能漂亮地对瓶子的重量进行分类(所有的图都是五种内容的结果)。通过考察贡献率,我们可以发现压力传感器的数据对第一个分量的贡献很大。
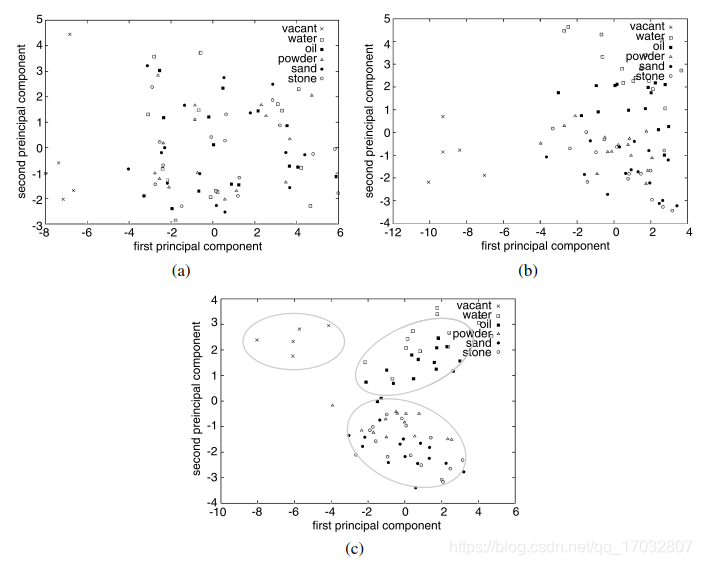
第二,我们关注的是材料。图9显示了不同频率水平振动的主成分分析结果。如图9所示,当机器人以1.25 Hz水平摇动瓶子时,可以检测出里面的物质是固体(粉末、沙子或石头)、液体(水或油)还是空的。虽然油的类别与水的类别有部分重叠,粉、砂、石的类别也有重叠,但我们可以在图9c中找到每一类。这意味着机器人可以通过动态触摸在一定程度上对瓶子里的材料进行分类。
3.4振动试验总结与讨论
实验表明,可以利用物体与机器人体之间的动态交互作用进行物体分类。由于机器人的身体是顺从的,本体感受传感器可以用于分类,机器人不需要额外的外部传感器。这说明,身体的配合可以提高机器人的感知能力。
在震动方向分类能力上的差异表明,人体顺应性的各向异性特性可用于获取对物体的丰富信息。机器人可以在晃动过程中改变晃动方向来探测物体,但本文并未对此进行研究。
我们还要求被试者通过摇晃瓶子来检测里面的物质,他们发现如果不用耳朵的话就很难了。只能通过动态触摸来识别物体,我们必须说,即使对人类来说也是一项相对困难的任务。为了增加能力,机器人应该有额外的外部传感器,如听觉传感器[15]。
从身体意象的角度来看,使用本体感受传感器进行分类是非常有趣的。如果机器人使用末端执行器传感器,如力传感器,它只能估计物体的动力学。如果机器人使用本体传感器,则机器人感知肢体和物体[24]的组合动力学。这一事实表明,当机器人抓取一个物体时,它的身体形象会发生变化,Iriki[25]就证明了这一点。这类工作可以作为研究如何构建身体形象的一种探索。
4.利用身体顺应性的适应性行为
在本节中,我们将通过一个开门实验来展示类人结构是如何帮助实现在人类环境中的适应性行为的。
4.1实验设置
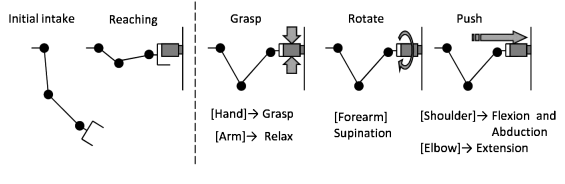
开门任务的实验设置如图10所示。门相对于机器人的位置和方向没有仔细校准。机器人首先利用装备的视觉传感器将手靠近旋钮,或者只是执行预先编程的动作,然后抓住旋钮。因此,机器人不能精确地向旋钮移动它的手,但如果它能移动手近于旋钮,它可以以一定的概率抓住旋钮,因为手是软的和欠驱动的[20,21]。抓取旋钮成功后,机器人交流绳按固定的动作顺序移动(图11),该动作通过不带感觉反馈的固定阀门操作来实现。在旋转阶段,机器人利用旋前肌扭转前臂。在推门阶段,机器人通过它的肩膀和肘部来推门。当它不握住把手时,预先设定的手的轨迹几乎是直的。但是,如果它紧紧地抓住门把手,它可以跟随门的运动,因为门把手的翼是柔韧的。刚开门,它就不再抓门把手了,因为它无法避免与门框的碰撞。
4.2实验结果
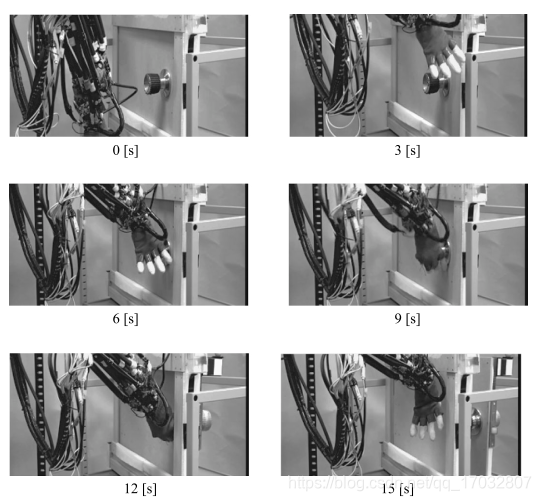
通过改变门相对于机器人的位置,我们进行了110次实验试验,来研究成功开门的面积大小。成功的开启顺序如图12所示。机器人在3 - 6秒到达旋钮处,抓住旋钮到9秒,旋转前臂到12秒,伸展肩膀和肘部打开门。当手臂在打开旋钮后移动2厘米以上,我们确定试验成功。由于门的位置和方向是随机选择的(如图13所示),机器人很难自动定位手靠近旋钮的位置。因此,在这些实验中,为了简单起见,手是由操作员引导到旋钮上,并让机器人抓住它。机器人不改变控制策略;每次试验都采用相同的阀门操作。
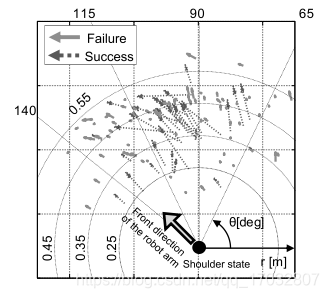
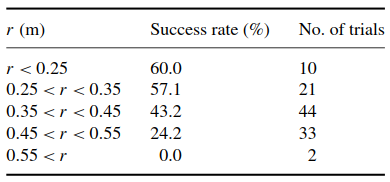
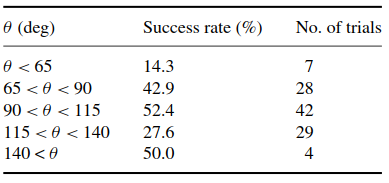
在图13中,用虚线箭头表示手的运动成功,用实线箭头表示手的运动失败。我们可以看到,当门在一定的区域内时,机器人可以打开门,即使相对的位置和方向不一样。在表2中,我们显示了在每个区域的成功率在距离肩膀的距离。当手在0.45 m以内时,机器人开门的几率在50%左右。在表3中,用同一组实验的角度来划分面积。在65<θ<115范围机器人开门成功率在50%左右。
4.3对开门任务的总结和讨论
从实验中可以看出,在开门时,发达的类人肌骨骼上肢具有较高的开门概率在一定范围内。然而,对于刚性机器人(例如,Ref.[19])来说,开门是一项非常精确的任务。因此,我们可以得出开门的鲁棒性来自于肌肉骨骼机器人的结构顺应性。特别是在开门时,旋外翻/spination旋转效果很好。这意味着类人的结构有利于打开门把手。
在这个实验中,我们只使用了一个圆柱形的旋钮,但我们可以期望,同样的策略可以应用到其他类型的旋钮,一旦机器人抓住了旋钮,肢体的顺应性使机器人能够跟踪门的运动。一般来说,设计有用的工具是为了让我们能够利用身体的约束[4]。从这个意义上说,我们可以在日常生活中利用我们的肌肉骨骼结构来完成许多任务。因此,拥有与人相同的结构将有利于实现这样的任务,而无需正式地描述它们常识是在软体中隐式编程的。
我们还没有实施任何来自本体感受传感器的反馈来控制肌肉。在某种程度上,很明显,机器人在使用传感器时变得很健壮,这将在不久的将来被研究。与此相关的是,我们也可以将人类的局部反射考虑在内,比如拉伸反射。我们也许能够研究它们的作用。在任何情况下,拥有一个拟人化的结构对于研究人类的具身智能都是有利的。
5.结论
在这篇论文中,我们提出使用一个拟人化的肌肉骨骼机器人在每个肢体作为一个工具来研究具身智能的人类。介绍了人工气动肌肉驱动上肢的设计,并对所配置的传感器进行了描述。通过动态触摸对象识别和门的开启两个实验来演示自适应机动性。
如果机器人的身体是顺从的,那么这种行为是由身体和环境的相互作用产生的。交互在很大程度上取决于法规遵循的结构。因此,要确定人的适应行为,具有相似的身体结构是至关重要的。这可能是软机器人的一个独特的观点,没有处理在刚性机器人,他们只是模仿人的牛- matics。更有趣的是,人体的顺应性并不是各向同性的,因为肌肉骨骼结构。由于人类环境是按照人的各向异性顺应性来设计的,因此具有相似结构的机器人将有利于实现类人自适应行为。
拥有相似的肌肉-骨骼结构对人机交流也很重要。从这样一个结构中涌现出来的行为有一种类似于人类的倾向。对我们来说,预测机器人的行为是很直观的。通过拥有相似的身体,我们将更容易分享存在于我们身体中的常识,而无需非常仔细地分析它。
参考文献



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









