






Anthropomorphic musculoskeletal 10 degrees-of- freedom robot arm driven by pneumatic artificial muscles
Arne Hitzmann, Hiroaki Masuda, Shuhei Ikemoto & Koh Hosoda
Graduate School of Engineering Science, Osaka University, Toyonaka, Japan
摘要:
本文介绍了一种由气动人工肌肉驱动的拟人化肌肉骨骼机器人手臂的结构和设计决策。该机器人的设计是为了允许人类的启发顺应运动,而不需要复制人体结构的细节。这导致了一个简单的机械设计,同时保留了人类的马达特性。除了机器人的构造细节外,我们将提供两个实验来展示机器人的灵巧性和顺应性方面的能力。
介绍
以生物为灵感的机器人技术在理解生物体和在机器人设计中利用它们方面已经得到了足够的关注。肌肉骨架系统(MsS)是人类重要的形态学特征。因此,开发肌肉骨骼机器人作为了解人类运动能力的一种方法已被广泛应用。到目前为止,已经开发了许多类型的肌肉骨骼机器人[1 9],它们的优点和应用在近年来已经被发表。总的来说,由于MsS的复杂性和现有技术的局限性,在机器人开发中模拟MsS已经具有挑战性。因此,当机器人被用来调查人类的MsSs时,它们面临着在生物合理性和运动能力之间的权衡。
驱动机器人主要有电动马达和气动人工肌肉两种方式。无论使用何种类型的驱动器,研究都具有相同的动机,以精确地重现人类的运动功能。2003年Inaba等人推出的Kenta[1]机器人是肌肉骨骼机器人领域的重要研究成果之一。本课题组一直在不断报道类人肌骨机器人的发展[2 6]。最新的机器人Kengoro拥有114个肌腱驱动自由度(DoF),被设计成尽可能接近人类的MsSs。在这种情况下,执行机构的精确控制是通过使用电动机实现的。最近,Kurumaya等人[10]研制出了由气动管路束组成的气动人造肌肉。它们的目的是真实地模拟生物肌肉的结构,而不必提高机器人的性能。这些机器人的主要应用是生物力学和康复,因此其机械系统的生物学合理性及其准确的驱动被认为是重要的。然而,MsS为机器人控制提供的系统优势还没有被研究。
为了关注肌肉骨骼结构如何工作与运动控制的关系,他们被建模和实施,以强调肌肉的驱动和关节的扭矩之间的关系。因此,对构成MsS的特定组件的行为和功能的基础研究已经完成。例如,Okadome等人的[11]的HUMA和Tondu等人的[12]的机械臂具有sim- plified muscle -骨骼结构,这允许更详细地研究关键部件的动力学和力学,如驱动器。当考虑到更复杂的结构时,这样的简单性对于建模和控制是不够的。因此,虽然这种方法在机器人方面提供了全面的模型,但是如果人类复杂的肌肉骨骼结构的功能不是基于控制理论的框架,很难对它们进行比较。
当考虑像行走这样的复合动作时,这种机械上简单化的系统是不合理的。需要更复杂的执行机构系统和骨架结构。此外,这些系统常常模仿人类的生物结构。Niiyama等人使用简单的基于规则的控制实现了跳跃和着陆[13 15]。Narioka等人开发了一种基于被动动态步行[16]的步行机器人,通过简单的基于规则的控制系统[17]也可以实现稳定的步行。机器人手臂方面,Hosoda等人演示了开门任务,Ikemoto等人演示了投球任务[18,19]。在这些研究中,我们可以发现简单和复杂的气动MsSs,其中评估的任务被广泛定义,因此气动肌肉的不精确性不是问题。然而,很明显,使MsSs更加复杂可以提高任务性能,而这是使用其他方案难以获得的。此外,因为这些机器人通常很难建模和控制。即使对于单个的执行器,控制器也不可避免地要专门用于特定的任务。事实上,在上述研究中,它们的控制器是完全不同的,这使得在相同的基础上讨论和比较它们的结果变得困难。到目前为止,根据研究的主要目的,机器人的设计原理有很大的不同。在性能和结构相似性之间找到一种折衷是至关重要的。
在这项研究中,我们创造了一个气动驱动的肌肉骨骼机器人手臂,以执行复杂的复合动作。机械臂的特点是:
1.由[20]发展而来的金属和碳纤维骨架。
2.气动肌肉的使用方法与[13 19]相同。
3.它有10个自由度的运动。
4.骨骼系统是自我支撑的,同时保持类似人类的活动范围。
5.控制系统设计方便使用,便于携带。
通过一系列的实验和测试,我们证明我们的机器人适合执行特定的运动技能。
本文档的其余部分结构如下。第二部分介绍了硬件结构、肌肉appa- ratus和控制系统。第3节详细介绍了软件的结构和设计。第4节介绍了任务评估的结果,曲柄旋转和轨迹跟踪。
2.硬件特点
本节描述并说明了机器人的硬件设计决策。由于其目标是接近拟人操纵行为,因此以人体结构作为设计的参考。我们制作了一个简单可靠的人体肩和臂模型,模仿了关键的机械成分。这允许一个可管理和可靠的系统,同时提供一个类似的范围的运动,以真实的东西。Hosoda等人发表了一份方案,对[18]进行了检测和构建。在此基础上,以肌肉路径优化为重点进行了进一步的设计迭代,以减少相互摩擦和骨骼结构。这一步骤使得单个肌肉的生命周期更长,同时也增强了运动技能。
2.1骨骼
作为支撑结构的骨骼为肌腱和肌肉提供连接点,更进一步,它的连接结构对身体的运动范围施加了机械约束。此外,这种结构还提供了在对其环境施加力时可以利用的sta特性。此外,它们还控制着肢体的运动轨迹,并确定了行动的空间。在这个空间内执行的动作可以被认为是类似于人类的,因为他们坚持同样的下铺设物理限制。直接采用肱骨、尺骨、腕骨、掌骨、指骨等骨,包括它们的空间关系、比例和力学特性。肩膀机制是特别难以实现的直接对应的自然。Ikemoto et al.[20]发表的设计被认为是这个机器人的初步工作,它通过复制人肩的运动范围来解决这个问题,并且是自我支撑的。这个设计被证明是可行的,因此在最终的机器人中使用。
图1展示了人体上半身骨骼结构的直接对比与机器人的CAD渲染图。关于它们的比例和组成,很明显它们几乎是相同的。肩部联动机构提供了与人体肩部装置非常相似的功能。早期的设计更接近于人类锁骨和肩胛骨的连接,但它的骨头往往会分开,除非有连接肌肉固定在一起。Ikemoto等人的设计通过一系列滑动关节与四个球关节的组合解决了这个问题。因此我们采用了这个设计,并根据我们对肌肉连接点的需要进行了修改。
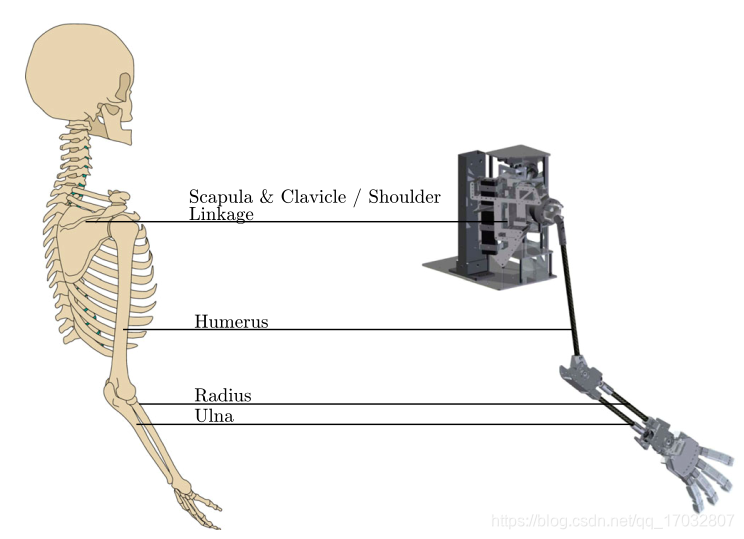
人类骨骼结构的紧密采用允许类似的肌肉路径,因为关节和附加点有相关的尺寸,可以在类似的位置被发现。就其运动范围而言,由于MsS是根据其内部约束来控制运动,这种配置使得机器人能够以最小的控制来执行类人运动。这使得机器人能够利用人类可比的一系列操作能力。
2.2肌肉装置
机器人的逼真拟人化是其设计目标之一。因此,需要一种机械上可与生物肌肉相媲美的替代品来驱动机器人。柔韧性、弯曲度和力量的可比特征是肌肉选择的重点。使用PAMs是一种可行的选择,因为它们易于生产,而且它们在顺应性和强度方面的特性与生物肌肉有明显的相似之处。通过比例阀实现驱动,可以在不同的速度下连续收缩。压力控制是由位于单个肌肉附近的压力传感器实现的,压力传感器将信息反馈给PID控制器。
生物肌肉有不同的感觉感受器,用于力量控制、感知和触发反射。为了整合这个额外的反馈源,从而更真实地再现人类的肌肉控制,一种感知肌肉张力的设备被开发出来。它是受到高尔基肌腱器官[21]的启发,[21]可以感知肌肉所受的压力。此外,假设一起的肌肉压力和紧张的参数集足以确定手和手臂的空间定位,允许基本的正运动学。
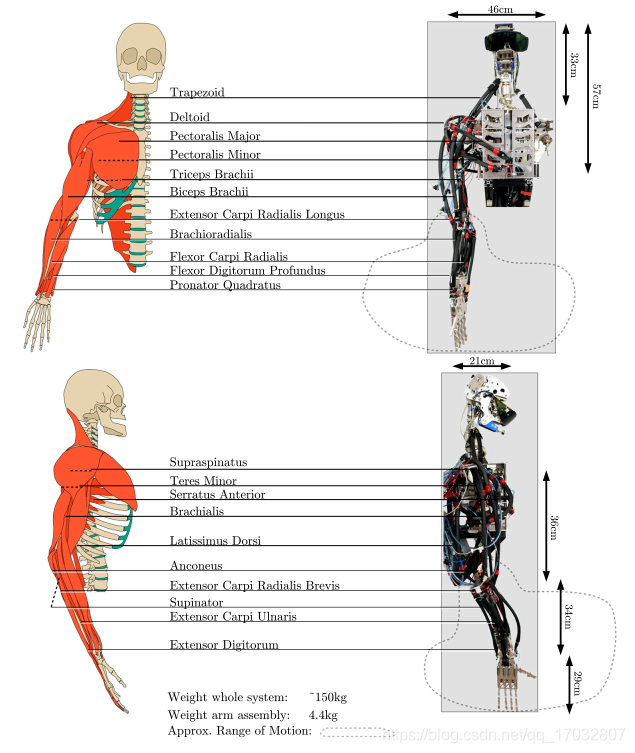
图2显示了人的肩膀和手臂肌肉与机器人的组成部分之间的对应关系。人的形象只包括最后被用在机器人上的肌肉。在选择采用哪一块肌肉时,通常是将相邻的几组肌肉合并为一块肌肉,或省略一块小肌。这是由于一束PAMs不能像一束真正的肌肉那样发挥作用,而且PAMs不能精确地模拟足够小的肌肉。
2.2.1气动肌肉
这个机器人使用的肌肉遵循McKibben设计的[22],它提供了一种负担得起的方法来构建单个的肌肉。由于肌肉的持续驱动和相互摩擦,它们暴露在机械磨损的环境中,随着时间的推移,它们的性能会发生变化,最终断裂。这种设计的好处是易于建造,便宜,快速更换,因为它们是内部建造的。
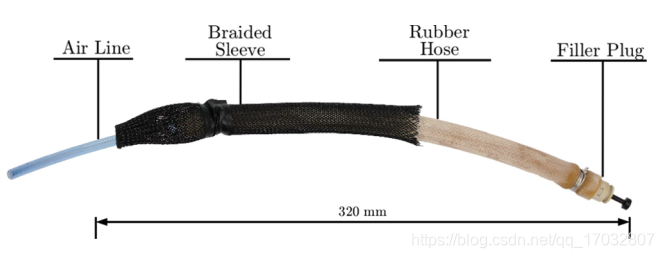
如图3所示,肌肉本身有一个简单的结构。一端插入一根橡胶管,另一端与供气管相连。该装置装在编织套管中,编织套管限制和引导橡胶管的充气,使其在压力达到0.87 MPa时不会破裂。当管子膨胀时,编织的套筒也会膨胀。编织套筒的直径大约是反比例的长度。因此,当橡胶管膨胀时,肌肉的长度会减少。
假设没有外力,根据套管已知的收缩特性,套管的精确长度可以用[23]中描述的方法来计算。但若将套管与套管间的摩擦因素考虑在内,并将其与肌肉的弯曲路径等因素考虑在内,则实际值与理论预测值存在较大偏差。这些不确定性使得机器人的可靠状态模型需要额外的感官反馈。
控制这些肌肉是微不足道的,可以通过比例三通阀或螺线管三通阀来实现。对于这个机器人,比例阀是用来允许一个更容易的流量控制,以均匀地加压肌肉在不同的速度。
进一步值得注意的是,它们对与环境的冲突或外部交互作用的延伸具有鲁棒性。在这种情况下,肌肉受益于他们遗传的柔顺特性。额外的外力可以施加在受压的肌肉上,使其在一定程度上得到拉伸,而不会造成损伤。
该特性可用于在碰撞情况下绕过障碍物,或在人类对机器人当前轨迹施加反作用力时进行被动撤退。
总之,遵循McKibben设计的PAMs具有继承性,价格合理,由于其设计简单,易于构建。这些特性使它们成为这个机器人最有利的选择。
2.2.2肌肉传感反馈
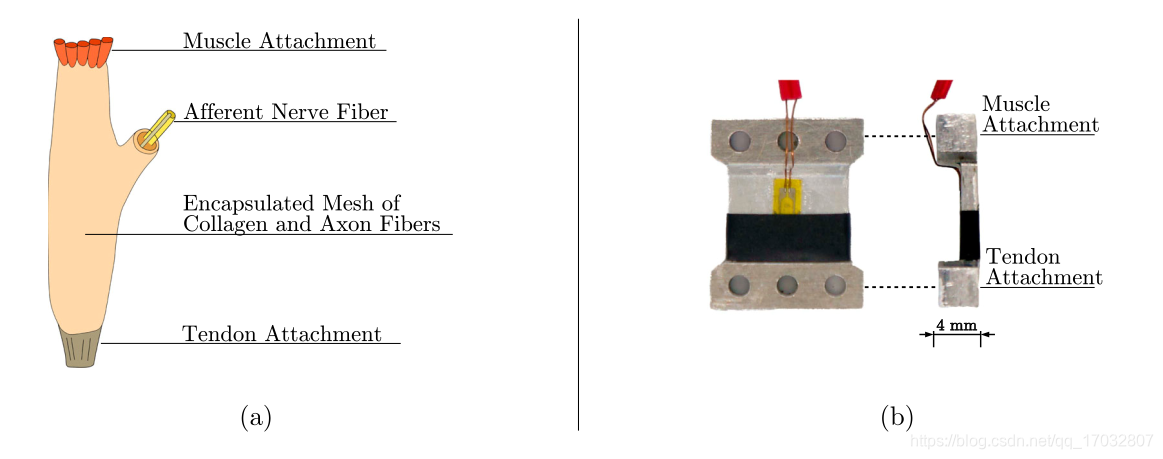
Prochazka和Ellaway[24]表明,控制MsS的一个关键方面是来自肌肉的感觉反馈。该机器人使用人工高尔基肌腱器官[21]作为附加的感觉受体。真正的器官是肌肉和肌腱连接处的一部分,由胶原蛋白和单个传入神经纤维组成。这种感受器对施加在肌肉上的张力产生反应。
我们人造的这个器官是一个线性应变计。有了这个反馈,施加在机器人上的力可以被检测和测量,而不涉及tac- tile传感器。由于其简单的功能和它的小尺寸,它可以外部连接到肌肉。
我们目前发展运动技能的方法是使用压力传感器反馈结合人工高尔基肌腱器官和运动跟踪来训练神经网络为向/逆运动学。
我们设计的人工高尔基肌腱器官如图4所示,由安装支架上的单个应变计组成。考虑到相邻肌肉的数量,支架的尺寸需要最小化。因此,每个仪表的Wheatstone电桥都是外部实现的。这使得人造高尔基肌腱器官的尺寸进一步减小,当施加典型的作用力(最高可达50公斤)时,尺寸的增加会影响其稳定性。
2.3控制系统
该机器人被设计为由一个单一的控制系统操作,提供低电平的控制气阀和读取压力和张力传感器。除此之外,系统应该使用机器人操作系统(ROS)来提供一个文档化的通信框架。这个决定阻止了使用有效的微控制器,取而代之的是单板计算机(SBC),它也已经提供了网络接口用于连接。对于电子控制,定制的pcb被设计和制造用于数模(空气阀)和模拟数字(压力传感器)转换器以及桥式传感器(张力传感器)(图5)。
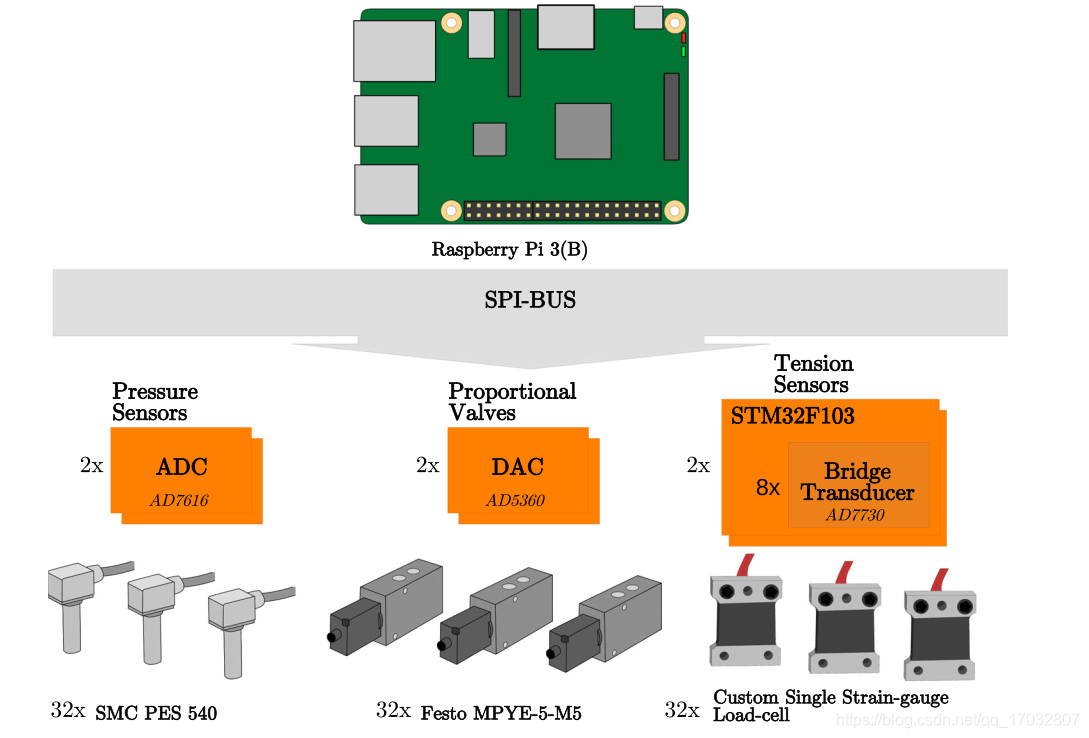
控制系统需要利用ROS进行通信和控制硬件,这意味着需要使用支持实时的Linux内核。这是通过使用rt -抢占补丁集实现的。该设计决策影响了控制系统与转换器集成电路之间通信所使用的接口类型。Ethercat是一种广泛使用的通信类型,在许多工业应用中都可以找到它。这种解决方案需要从端专用的集成电路,并且会增加控制器设计的复杂性和成本。因此,它被SPI总线取代,这是原生的树莓Pi 3B。访问树莓派3B总线的必要确定性是通过一个用户空间驱动程序实现的。缺点是相对较小的主内存只有1 GB。计划的软件架构利用动态加载控制器的每个单元会造成一些开销。由于交换对系统延迟的影响,是不可接受的选项,因此通过创建一个定制的Linux系统来优化内存使用。通过创建一个优化的基于gentdoo的Linux系统,内存使用大大减少。
3.软件特点
在本章中,我们将详细描述软件设计决策。讨论了用于通信和控制的罗斯基零件的驱动器设计和结构选择。
早期设计的一个决定是使用ROS来支持实验应用程序的快速和结构化开发。支持这一决定的主要特征是网络能力和多种通讯模式以及ROS提供的构建系统。这些是可取的,因为机器人的体系结构要求独立的开发系统能够能够在网络上指挥机器人。分离控制和命令可以保证底层驱动程序的完整性,因为它不会被开发人员破坏。
本文提出的机器人可以作为一个平台,供不同研究人员同时进行多个实验。易于使用的通信接口有利于快速的开发周期。提供的依赖项管理是ROS的另一个优势。它的构建系统为为机器人编写软件的个体开发人员提供了依赖满足和一致的构建。
3.1驱动设计
由于其计算性能和I/O接口,如SPI和众多的GPIOs,所以决定将控制器硬件平台设置为树莓派3B。
驱动程序执行一个实时启用的上下文,该上下文以500 Hz的速率读取传感器值并写入执行器命令。因此,各个肌肉控制器以相同的速度更新。此外,驱动程序在一个非实时的中断驱动上下文中实例化通信。在这两个不同优先级的上下文之间交换和访问数据是精心安排的,以保证主控循环没有中断。
我们开发了转换器驱动程序代码的自定义实现,以实现额外的性能优化,因为读取单个转换器的顺序被排序,从而有效地使用转换时间在管道中发出下一个命令,从而最小化总体延迟。
对系统延迟的主要改进是使用了用户空间I/O库,它允许直接访问SPI和GPIO控制器。通过将硬件映射到虚拟内存中,这样就可以直接指示硬件控制器,从而绕过了系统调用的发出。遵循这种方法,可以看到驱动程序确定性的优点,因为可以认为内存访问的延迟相对较小,而系统调用可以有未知的延迟,这取决于完全可预空内核的当前状态。
3.2ROS架构
ROS兼容性是机器人软件栈的主要设计目标之一。完整的基于ic的通信以及主题广告和订阅是在主驱动程序中实现的(图6)。
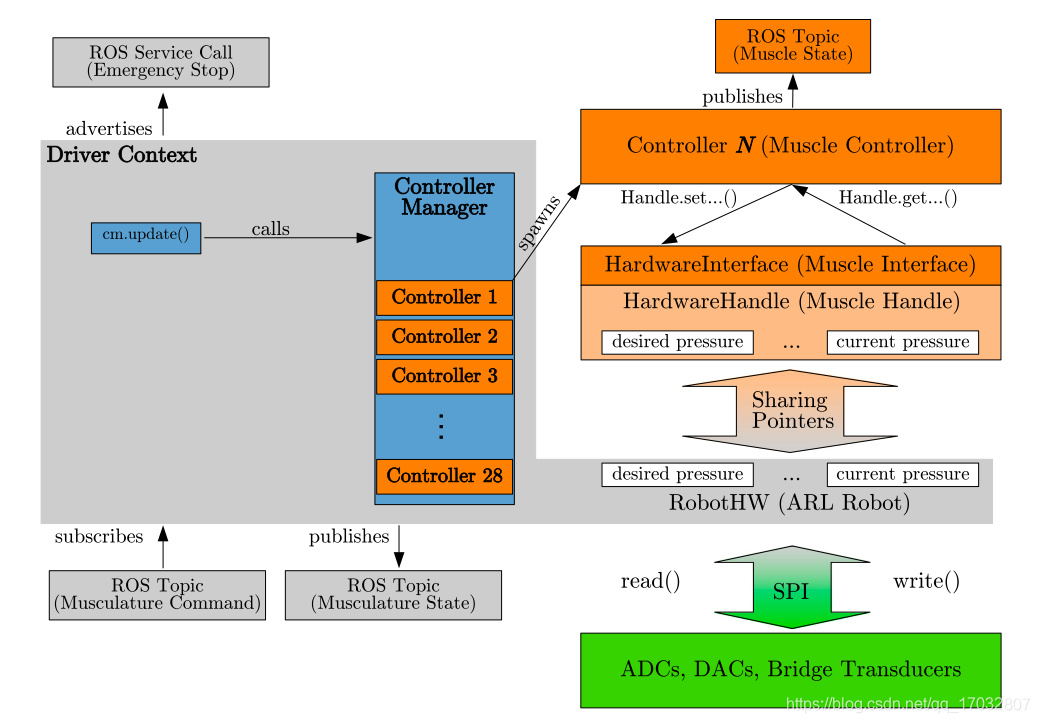
更新的肌肉的PID控制器是han-被定制的控制器,每肌肉和加载他们的配置从ROS参数服务器。该设计模式基于ros_control[25]接口,并结合主驱动程序的实时上下文提供实时安全的多线程功能。至此,ROS仅提供了转动关节的控制器类,并提供了力矩、速度和位置控制以及感官控制器的控制方案。因此,一种类似于肌肉执行器的新型控制器被实现。新分类提供了控制单个肌肉内部压力作为一种操作模式和控制气流的激活控制模式。此外,还对张力传感器的噪声数据进行了滤波处理。
这种激活控制使它能够直接控制肌肉收缩的程度。对于PAMs,通过相应的调节通过比例阀的气流来实现这一点。这两种控制模式类似于伺服电机的速度和转矩控制,因此代表了相同的控制思想的肌肉骨骼版本。
4.机器人运动能力的实验验证
我们开始表明,人体结构在控制机器人执行运动技能方面具有优势。本章将提供证据,证明机器人的机械结构允许平稳运动和精确的轨迹调整,这强调,尽管其非传统的设计,机器人的控制系统是能够灵活可靠地移动手臂。我们还演示了与PAMs结合的肌肉骨骼结构允许通过简单的控制输入执行困难的任务。
第一个实验评估机器人是否能够以合理的精度重复轨迹,从而允许与环境或人类进行控制交互。第二个实验说明了类人肌肉骨骼设计的好处,以执行紧张的任务与低控制复杂性。
4.1结果与讨论
这些实验旨在展示机器人完成不同任务的可行性,这些任务代表了人类运动或人机交互。因此,他们应该证明机器人能够反复跟踪轨迹,以强调控制是有效的,机构不会引起不稳定或颠簸行为。机器人的类人身体结构,结合其肌肉的灵活性,提供了一个固有的柔顺系统,可以利用其环境的机械约束在交互。
4.1.1实验一:轨迹重复
目标:确定机器人是否能够以合理的精度重复轨迹。
设置:为了本实验的目的,提供一个机器人的抽象模型比较方便。这个机器人由一个拥有10个自由度的骨骼系统组成。与此相连的是一个由28块气动肌肉组成的系统。为此,我们将测量量定义为末端执行器在空间中的位置,x = (x1, x2, x3)。一般来说,末端执行器的位置是每个肌肉压力的非线性函数,p = (p1,…, p28), M为每块肌肉 的物理参数,
L肌肉和骨骼组成部分的相对空间配置,其中我i们定义为,代表了函数
的形式。肌肉的物理参数包括弹性和内摩擦等数量,是肌肉形态的基本组成部分,定义为
。为了这个实验的目的,我们不知道这些函数的形式
,并且通过观察我们知道
对这些量的依赖性很弱。因此,我们把它们当作随机误差的来源。我们无法构造函数
的理论形式,因为它们的依赖项
过于复杂。事实上
依赖于
。同样,根据观察我们知道
对
的依赖是微弱的如果
存在一个微笑的变化。我们把它当作随机误差的来源。考虑到这些近似,我们得到:
为了生成一段轨迹我们定义一个起点和一个终点
,在压力空间中改变每个压力
,式中,T为完成动作所花费的总时间。给定大致的模拟,我们使每一组初始和最终压力对应于一个独特的轨迹。在现实中,从一组压力到另一组压力的重复运动将导致不同的轨迹。这些差异可以归因于
的变化,其对于不同的运行不能被准确地配置为相同的,并且还存在
的测量误差。另一个误差来源可能是机器人部件的磨损。然而,我们的测量是在很短的时间内进行的,因此这些问题可以忽略不计。
指令生成:我们把从到
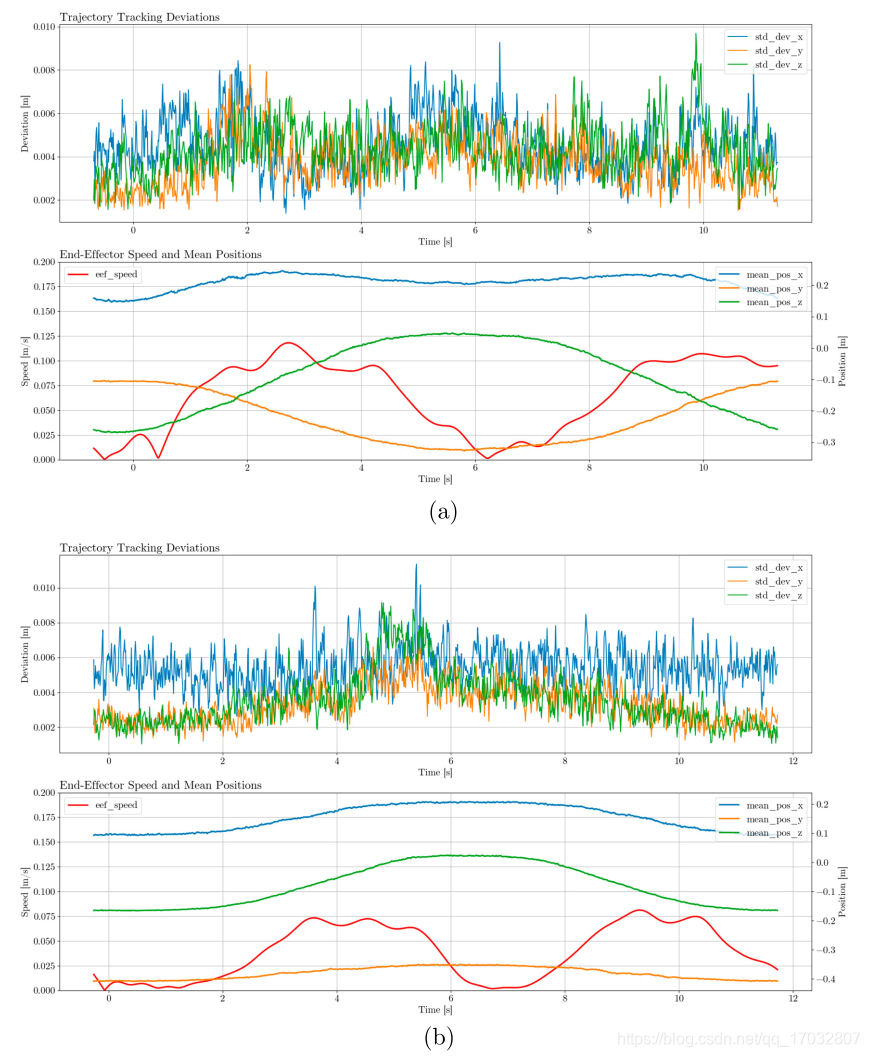
的压力空间变化细分为600个中间压力空间。这个数字是由在总时间T =6秒内100赫兹的压力更新率得出的。选择这个分辨率是为了通过快速执行来避免覆盖可能的抖动动作,并增加跟踪覆盖率。此外,当发现肌肉的反应时间比微小压力变化的更新速度长时,这一决定允许持续运动。这是由肌肉控制器的PID参数选择造成的。在任务的中点,机器人反向执行轨迹完成运动,到达初始位置。一次闭合动作视为一次试验,重复13次。如图7所示,末端执行器的速度为6-12 cm/s。因此,这些轨迹代表了以合理速度持续平稳的运动,因为该场景被假定为类人机器人在执行灵巧任务时的常见行为的代表。
测量:为了观察轨迹,常用的方法是通过连续计算末端执行器的正运动学来跟踪末端执行器的位置。由于机器人缺少位置传感器,这在本实验中是不可能的。因此,在轨迹执行过程中,采用运动捕捉系统跟踪手的位置。每条轨迹重复13次,并以55赫兹的频率进行跟踪。末端执行器位置测量误差的标准偏差x轴为0.847 cm, y轴为0.142 cm, z轴为0.241 cm。
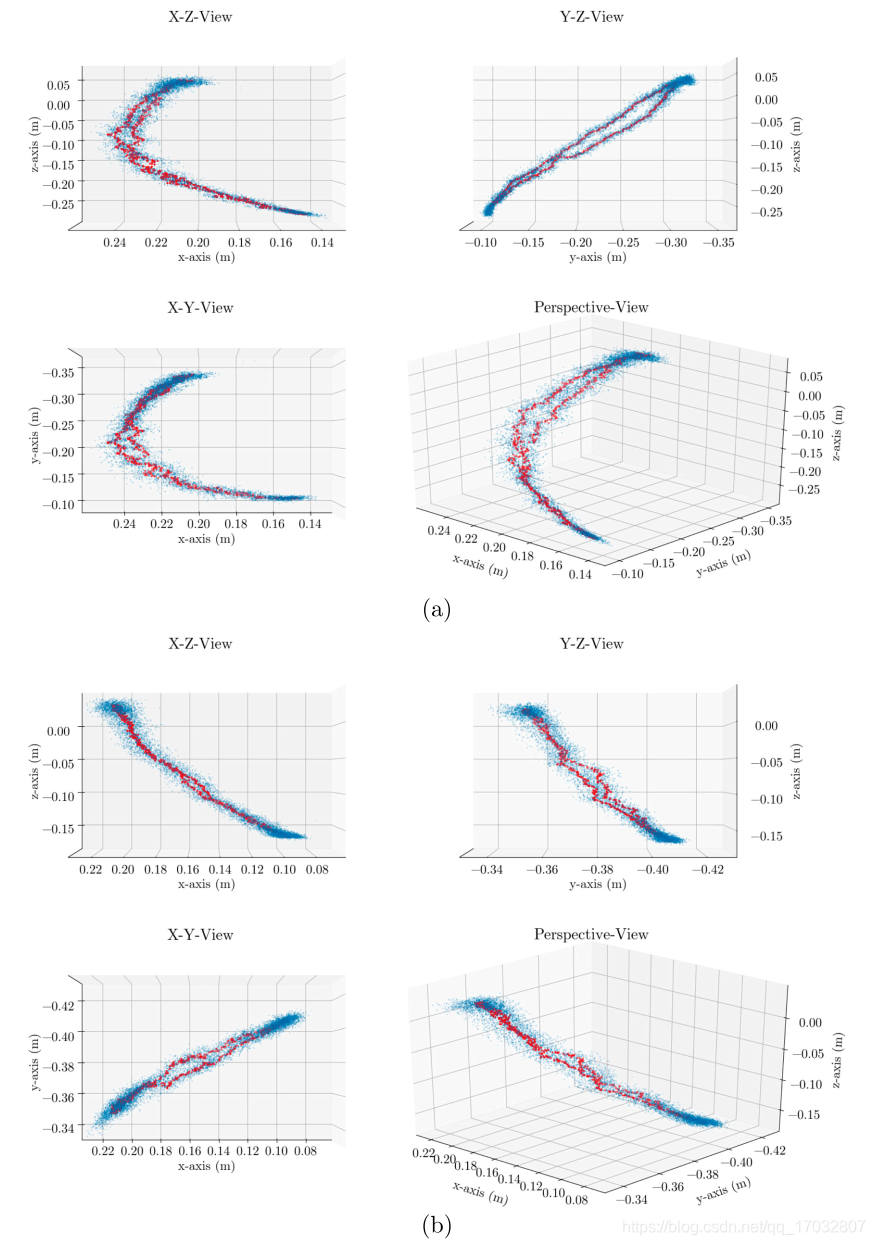
结果:跟踪数据分析见图7和图8。你可以看到,运动是一致地执行,没有异常值或主要的颠簸。这些数字表明在机器人的轨迹执行过程中具有一致的性能。图7中的可视化显示了强制执行期间跟踪的标准偏差。在运动过程中观察不到更大的增加,这一事实考虑到我们的跟踪方法是足够准确和稳定的假设。末端执行器的测量速度为6 12 cm/s。此外,图8中的散点图为我们最初的假设提供了证据,即最终轨迹依赖于和
。很明显,平均轨迹(突出显示)在轨迹的中间出现了分叉。这可能是由不同的初始参数引起的,如内摩擦。实验估计轨迹重复的标准差为8mm。我们认为这种精度对于我们计划使用这个机器人进行的实验来说已经足够了。对于像抓取一个物体这样的运动技能,不应该比完全张开的手所能抓取的最大圆柱体的半径更大。有了这种程度的操纵性,即使没有完全接近机器人,物体也能滑入机器人的手中。我们的机器人可以满足这一要求,因为目前的手可以抓取直径达8cm的圆形物体。对于包括人机交互的实验来说,这种精度对于任务链的握手或物体的传递也足够了。
4.1.2实验二:曲柄旋转
目的:确定该机器人是否能利用现有的机械约束来执行较低复杂度的控制方案。
设置:我们决定在这个实验中使用手曲柄的操作作为任务。图9和10显示了实验期间的实验设置。机器人的末端执行器松散地绑在曲柄的手柄上。曲柄本身是自由移动与可忽略的阻力旋转运动。曲柄轴装置附在一张桌子上,中心轴放置在大约右侧40厘米,在机器人身体中心前方45厘米处。这个地方给机器人提供了最大的活动自由。这确保了结果不会受到工作范围边界附近操作的影响,而工作范围边界可能会受到肌肉十个值的极值的影响。机器人与曲柄之间的距离是机器人向前可达到的最大距离的三分之二。
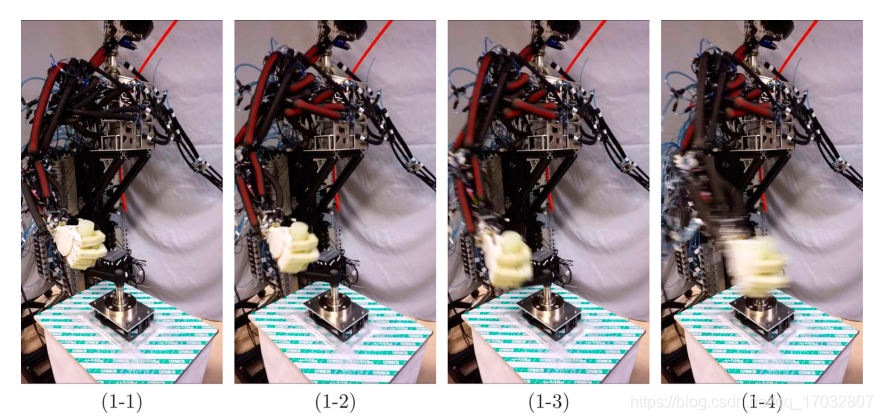

命令生成:在曲柄旋转实验中,定义了三种旋转曲柄的姿势。每个位姿由压力配置配置p1、p2和p3来定义。在空间上,姿态被定义为在θ1~10°、θ2~170°和θ3~190°处,其中所有角度都是围绕曲柄的中心逆时针方向测量的。零位置向量与机器人表面的法向量是反平行的。第三次运动后,手臂被拉回初始位置。在这三种固定姿势下,肌肉压力被指定为其最大压力的90%或20%。通过反复试验,我们发现了要实现从一种姿态到另一种姿态的过渡,需要改变哪一种压力子集。我们注意到,成功完成任务的压力配置并不是唯一的。为了保证稳定性,选择了最大值的20%的最小压力值。
测量:使用视频记录来跟踪任务。
结果:任务的执行如图9和10所示,在90%压力下的肌肉被突出显示。任务的满意执行支持了人体结构在约束机制作用下具有优势的假设。
如果在末端执行器不受曲柄约束的情况下执行控制命令,则其轨迹会与实验中所走的圆路径产生较大的偏离。对MsS运动范围的顺从和内部约束的组合允许利用由曲柄强制执行的外部约束来完成运动。在图9的前三幅图像序列中可以看到,肩部连杆机构对曲柄的中心施加了一个力。这随后导致肩膀机制的提升,这导致了一个小的旋转肘部和转动手向外让它旋转曲柄的第一个运动。同样值得注意的是,系统的弹性是防止它对自身造成损害时,施加一个力对一个外部约束。就像曲柄这样的机构而言,机器人不仅不受给定的外部约束的损害,而且它只使用简单的控制方案和身体的特性来引导自己。
5.结论
本文介绍了一种由PAMs驱动的新型骨骼肌机器人。该设计是生物启发,其中人体结构是近似机械简单和健壮性,而不是直接重塑。对机器人的电机性能进行了两个实验。实验1验证了它在缓慢平稳重复轨迹中的灵巧性。第二个实验说明了机器人的类人结构约束和PAMs的灵活性是如何结合在一起的,允许使用简单的控制方案操作一个曲柄。
根据这些结果可以得出结论,机器人能够作为一个可靠的平台,为长期的实验。它的设计和驱动器的选择允许快速和动态以及缓慢和稳定的运动,正如两个实验所证明的。
这个机器人已经被建造用于广泛的实验用途,它的设计允许快速和廉价的更换损坏的执行机构。与广泛使用的肌腱和马达相比,这是一个主要优势,因为它们在经济和时间上的维护成本都很高。
一种可能的替代驱动方案是使用虚拟激动剂-拮抗剂机制,如[26]所介绍的。一旦使用这种设备的复杂的高自由度系统能够被开发出来,它们的使用可以消除PAMs目前的缺点。
6.未来工作
本文提出的机器人平台通过模拟机器人的运动能力,证明了其在类人操纵领域的实验可行性。后续的研究将集中于可能的控制方法。对于肌肉骨骼机器人的控制,存在着大量的前期工作[27 33]。
未来的工作将集中于使用神经网络来训练正、逆动力学模型的学习技术。这一目标将与利用强化学习的实验并行进行,以实现各种技能,如机械操作,如门。假设该机器人的拟人化性质将为设计为人类使用的机构提供学习曲线,因为该机器人可以利用其与人类相同的形态特征。第三种方法是使用非深度q-网络,它在解决诸如玩街机游戏这样的感觉听觉任务中显示出很高的可能性。我们假设视觉、压力和张力数据的结合将补充这种方法。我们将研究这种方法是否可以用于学习需要眼手协调的运动技能,如打篮球或飞镖。
参考文献


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









