







 本文探讨了PID控制器的多种改进方法,包括积分分离、抗积分饱和、梯形积分、变速积分、不完全微分、微分先行、带死区、带前馈补偿和带Kerman滤波器,通过MATLAB仿真分析了它们对系统性能的影响,例如减少超调、提高稳态精度等。
本文探讨了PID控制器的多种改进方法,包括积分分离、抗积分饱和、梯形积分、变速积分、不完全微分、微分先行、带死区、带前馈补偿和带Kerman滤波器,通过MATLAB仿真分析了它们对系统性能的影响,例如减少超调、提高稳态精度等。
1. 积分分离
为了解决在大误差情况下积分器积累的大控制量影响系统超调的情况,可以只在误差较小的时候开启积分项,以消除静差;在误差大的情况下取消积分项。
我们设定一个阈值,在这个阈值的范围内开启积分项,在误差大的时候使用PD控制;在误差小的时候使用PID控制,提高精度。
对阈值的选择在这里比较重要,首先可以获得无积分情况的稳态误差,阈值需要包含误差带。如果不能包含误差带,也就是说一直无法开启积分消除静差,积分起不到作用了。
具体方法1:先进行无积分的阶跃信号下的仿真,获得稳态误差。阈值β为误差乘以一个略大于一的系数
下面的就是按照这种思路进行的。(程序输入阶跃信号最后必须接近稳定,否则参数不可用)
(方法2:对线性系统,通过计算得到无积分情况下的稳态误差。比如使用终值定理。)
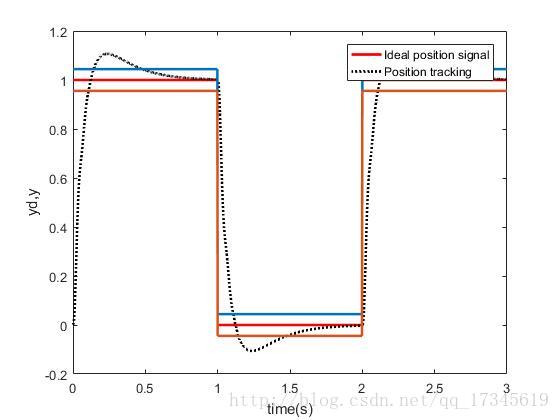
不加入积分分离:
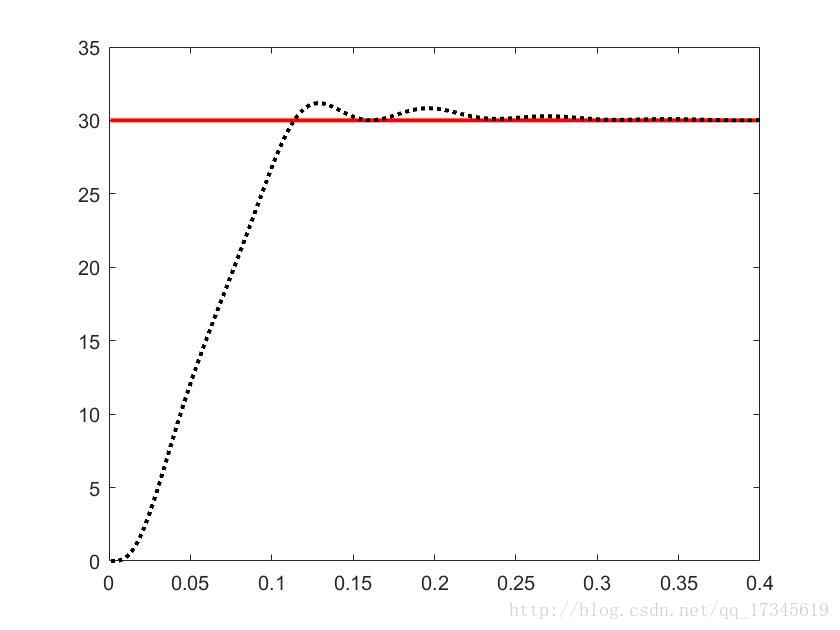
自动确定阈值的积分分离:
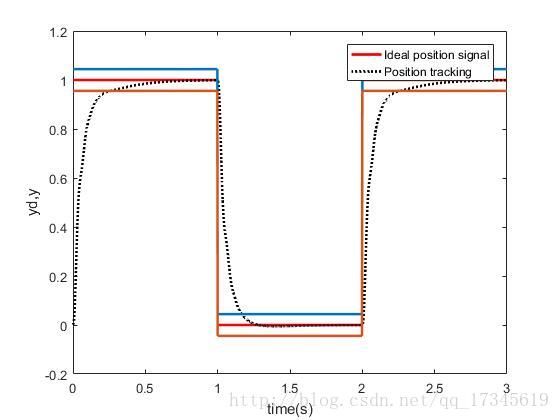
可见通过积分分离减少了超调,并且稳态精度也很好。
上面的积分分离相对而言是一种比较粗糙的做法,如果把积分的突然分离换成一种渐变,效果则要好一些。
2. 抗积分饱和
受到各种实际系统的约束,控制器的输出值只能在一个安全的范围,积分值超出线性区后保持不变,这种特性在积分值饱和后,退出饱和状态的时间较长,系统的动态特性变差。
防止积分饱和的方法之一就是抗积分饱和法,该方法的思路是在计算u(k)时,首先判断上一时刻的控制量u(k-1)是否已经超出了极限范围:如果u(k-1)大于umax,则只累加负偏差;如果 u(k-1)小于umin,则只累加正偏差。从而避免控制量长时间停留在饱和区。
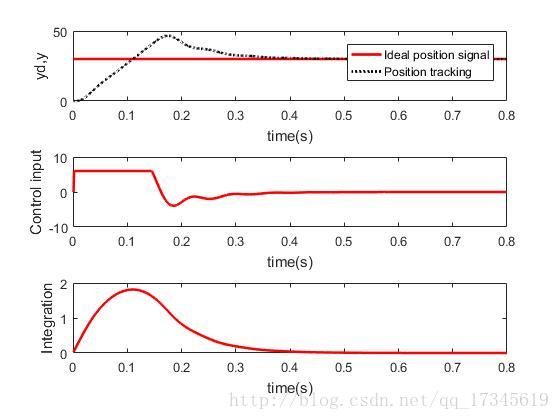
不加入抗积分饱和:
加入抗积分饱和:
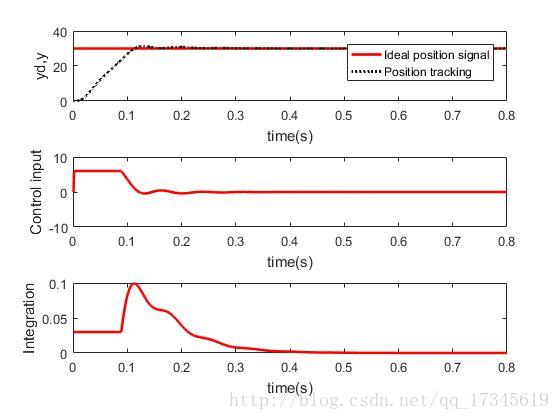
控制器输出值最大设定为6,可见由积分器造成的超调被减弱了。
3. 梯形积分
运用梯形公式,使用两次采样值计算每步的累加值。
将原来的积分运算:
替换为:
感觉在采样足够的情况下效果差异不明显,在采样比较稀疏的情况下控制效果有较大提升。
在采样足够大情况下:
采样较少使用普通积分的输出响应:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6986
6986

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









