







关注同名微信公众号“混沌无形”,阅读更多有趣好文!
原文链接:https://mp.weixin.qq.com/s/d6EKLlen4gF8Eoat8eSFvQ(包含原文PDF百度云下载链接)

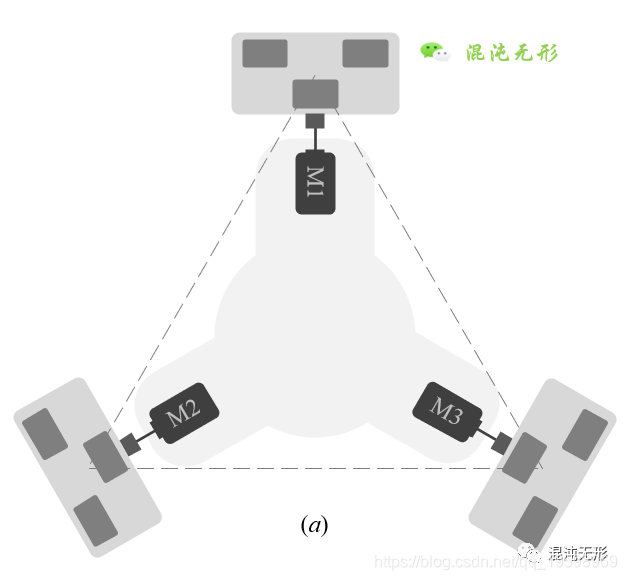
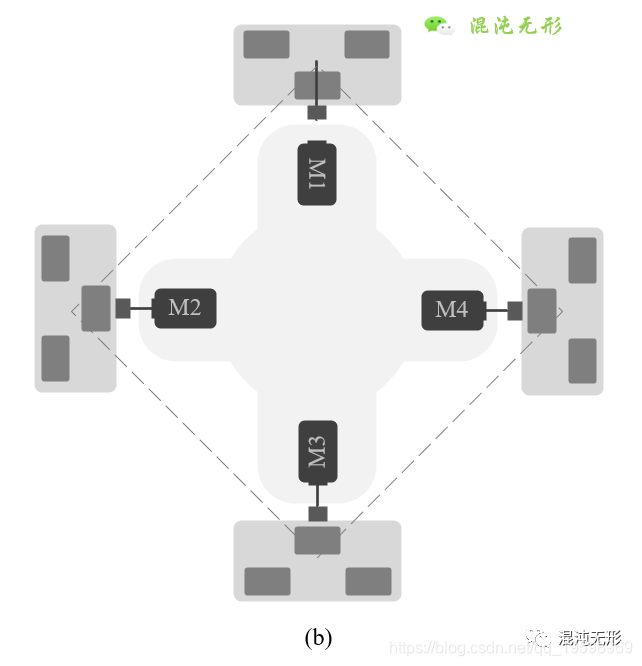
图 1.4 全向轮机器人构型.(a)三轮构型,(b)四轮构型
全向轮特有的运动模式决定了全向轮移动机器人的构型。如图 1.4所示,常见的构型分为三轮构型和四轮构型两种,三轮构型仅使用三个电机,且不需要使用悬挂(三点决定一个平面),其结构较为简单;四轮构型使用四个电机,需要使用悬挂,但运动稳定性更好。
精彩的理论论证过程见原文链接(含全文下载链接)
由于网页排版效果一般,所以笔者按照期刊论文版式为小伙伴们整理了原文PDF,方便收藏和回味。
原文链接:https://mp.weixin.qq.com/s/d6EKLlen4gF8Eoat8eSFvQ(包含原文PDF百度云下载链接)
CSDN下载链接:https://download.csdn.net/download/qq_19598969/20664024如果喜欢的话,可以关注同名微信公众号“混沌无形”,阅读更多有趣好文!



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











