




 本文概述了多种无人机遥测技术,如CUAVPW-Link、ESP8266/ESP32Wi-Fi遥测、FrSky遥测系统、Yaapu双向遥测地面站以及MSP和SiKRadio等串行通信协议。详述了如何连接、配置和使用这些技术来实现无人机与地面站的数据交换。
本文概述了多种无人机遥测技术,如CUAVPW-Link、ESP8266/ESP32Wi-Fi遥测、FrSky遥测系统、Yaapu双向遥测地面站以及MSP和SiKRadio等串行通信协议。详述了如何连接、配置和使用这些技术来实现无人机与地面站的数据交换。
文章目录
- Bluetooth
- CUAV PW-Link
- ESP8266 wifi telemetry
- ESP32 wifi telemetry
- FrSky telemetry
- Yaapu Bi-Directional Telemetry GCS
- HOTT telemetry
- MSP (MultiWii Serial Protocol)(version 4.1)
- MSP (version 4.2)
- SiK Radio v1
- SiK Radio v2
- SiK Radio configuration
- SiK Radio advanced configuration
- XBee
1.1 Bluetooth
篇幅过多,另起一篇介绍:
1.2 CUAV PW-Link

CUAV PW-LINK 是一款基于 ESP8266 的 2.4Ghz WIFI 遥测无线电。它使用 +5V、地、TX 和 RX 信号连接到任何 ArduPilot 遥测端口。它以 57.6 Kbaud 的标准默认参数和 MAVLink2 遥测协议运行,通过 WIFI 以标准 Mission Planner/ QGC UDP 端口 14550 进行连接。
使用外置天线时,典型范围为 450m。
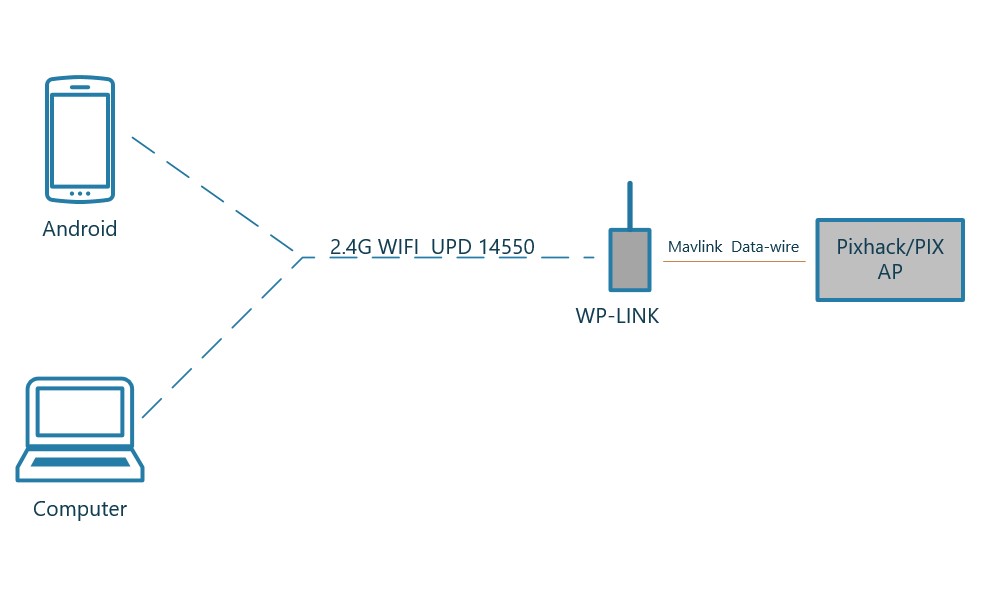
1 连接到地面站
在电脑或安卓手机上打开 WIFI 连接对话框,选择 CUAVWLINKxxxx SSID 并使用密码 cuavwlink 进行连接。连接后,使用 UDP 连接,端口 = 14550(默认端口),使用 Mission Planner 进行连接。QGC 将自动检测并连接。
1.3 ESP8266 wifi telemetry
篇幅过多,另起一篇介绍:
1.4 ESP32 wifi telemetry
篇幅过多,另起一篇介绍:
1.5 FrSky telemetry
篇幅过多,另起一篇介绍:
1.6 Yaapu双向遥测地面站
ArduPilot 现在不仅能够通过 FrSky 遥测技术(参见 FrSky Telemetry)显示来自自动驾驶仪的下行链路遥测数据,以便在 OpenTX 兼容发射机上显示,还能够请求和更改参数,并向自动驾驶仪发送一些命令。
1 Taranis显示屏示例
2 QX7显示屏示例
3 Horus/T16示例

概述
要使用此功能,你需要在 OpenTX 发射机上设置 Yaapu LUAGCS 脚本。运行此脚本时,Yaapu 遥测脚本(如果也在使用)将被暂停。不过,Horus 类发射机上仍会显示状态信息和遥测信息,但 Taranis 类发射机上只显示电池电压。
一旦退出 Yaapu LUACGS 脚本,其他脚本(如 Yaapu Telemetry 脚本)将重新启动。
可以在脚本中轻松更改要显示的参数,参数屏幕可以全局应用、按飞行器类型应用和/或按个别车型应用。
支持 Taranis/QX7/Horus/T16 类 OpenTx 发射机。
设置
Yaapu LUAGCS Wiki 上有完整的说明。支持问题可在此处(here)发布。
1.7 HOTT telemetry
篇幅过多,另起一篇介绍:
1.8 MSP(MultiWii 串行协议)(4.1 版)
篇幅过多,另起一篇介绍:
1.9 MSP (version 4.2)
篇幅过多,另起一篇介绍:
1.10 SiK Radio v1
篇幅过多,另起一篇介绍:
1.11 SiK Radio v2
篇幅过多,另起一篇介绍:
1.12 SiK无线电配置
篇幅过多,另起一篇介绍:
1.13 SiK无线电高级配置
篇幅过多,另起一篇介绍:
1.14 XBee
篇幅过多,另起一篇介绍:


















 764
764

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











