







文章目录

前言
Rover-4.2.0(和更高版本)支持自动识别系统(AIS)传感器(Automatic identification system (AIS)),允许在地面站显示载人船只的位置。

使用自定义 Firwmare 构建服务器(Custom Firwmare Build Server)的固定翼和旋翼飞机也可以支持这个外围设备,方法是创建一个固件构建,包括 IDENT 类别下列出的这个功能。
1 购买什么
- dAISy 2+
- AIS 兼容天线(161.975 MHz 和 162.025 MHz)。包括这个在内的(including this one) VHF 天线应该可以使用。
2 自动驾驶仪的连接
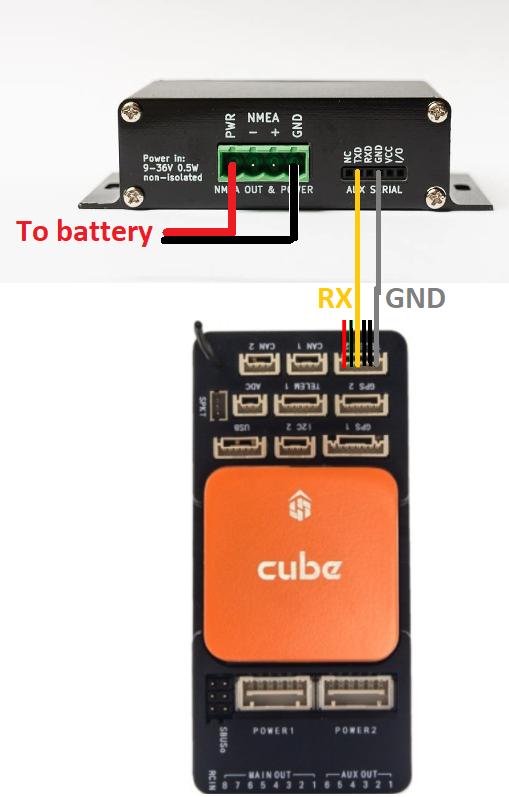
dAISy2 应连接到自动驾驶仪的一个串行端口,如下图所示。
3 自动驾驶仪的配置
用地面站连接到自动驾驶仪,设置这些参数,然后重新启动自动驾驶仪。
- AIS_TYPE = 1(使能);
- SERIAL1_PROTOCOL = 40 (AIS),如果传感器被连接到串行端口1。如果使用另一个串行端口,请设置适当的 SERIALx_PROTOCOL 参数;
- SERIAL1_BAUD = 38 (38400 bps),如果使用串口1。如果使用另一个串口,请设置适当的SERIALx_BAUD 参数来代替;
- SR0_ADSB = 5,以便通过Serial0(USB 端口)向地面站发送 AIS mavlink 信息。如果使用遥测无线电,对应于其串行端口的 SRx_ADSB 参数也应设置为 5(Hz)。
4 dAISy2配置和测试
- 使用 USB 调试线将 dAISy2 连接到你的电脑上;
- 下载、安装并运行一个终端程序,如Putty;
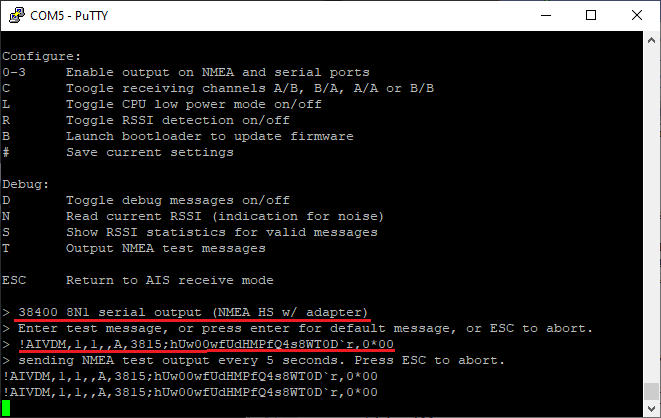
- 以 38400 波特连接到 dAISy2 的 COM 端口,按<ESC>查看设置菜单;
- 输入"3"来启用串口。应该显示"38400 8N1串行输出(NMEA HS w/适配器)";
- 键入"#"来保存这一改变,并在启动时保留这一波特率;
- 键入"T"启用输入测试NMEA信息,然后复制粘贴此信息,"!AIVDM,1,1,,A,3815;hUw00wfUdHMPfQ4s8WT0D`r,0*00",或点击"Enter"并使用默认位置;
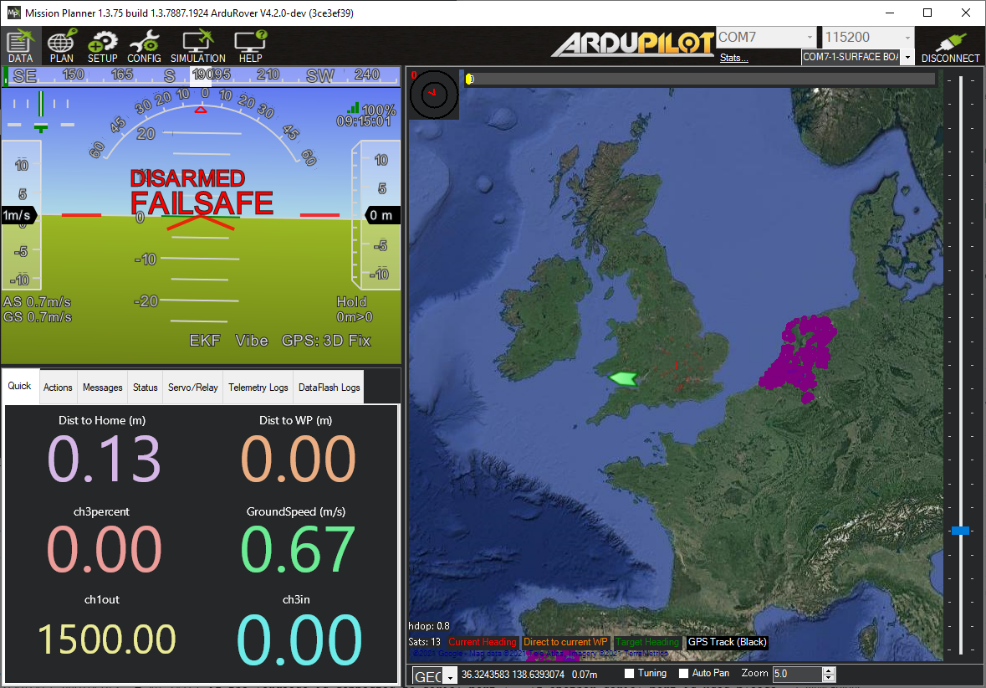
- 用 Mission Planner(或其他地面站)连接到自动驾驶仪,一艘船应该出现在英格兰的西南海岸;
- 按<ESC>键,停止发送测试信息。
5 纪录
AIS_OPTIONS 参数指定了哪些 AIS 消息被记录下来。这些信息对调试很有用,包含以下信息。
- TimeUS:收到 AIS 信息的系统时间;
- Num:当前积累信息中的片段数量;
- Total:本句的片段数;
- ID:多句子信息的顺序信息 ID;
- Payload:数据有效载荷。
6 用户视频
SERIAL1_BAUD释义
Telem1 端口上使用的波特率。大多数基于 stm32 的板可以支持高达 1500 的速率。如果你设置了一个你无法支持的速率,然后无法连接到你的电路板,你应该从不同的飞行器类型加载固件。这将把所有参数重置为默认值。
| Values | ||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|


















 1172
1172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











