







 本文详细介绍了双轨迹传感器巡线的原理和两种巡线方式。通过分析两个传感器在轨迹上的不同状态,提出对应的机器人行驶策略。针对可能出现的00状态(两个传感器都不在轨迹上),讨论了编程中如何处理这一情况以避免错误转向。
本文详细介绍了双轨迹传感器巡线的原理和两种巡线方式。通过分析两个传感器在轨迹上的不同状态,提出对应的机器人行驶策略。针对可能出现的00状态(两个传感器都不在轨迹上),讨论了编程中如何处理这一情况以避免错误转向。
双轨迹传感器巡线
一、主要思路:
双轨迹传感器巡线即使用两个传感器走轨迹线。双轨迹巡线有两种巡线方式:两个传感器都在轨迹上、两个传感器都在轨迹外,如图1-2:
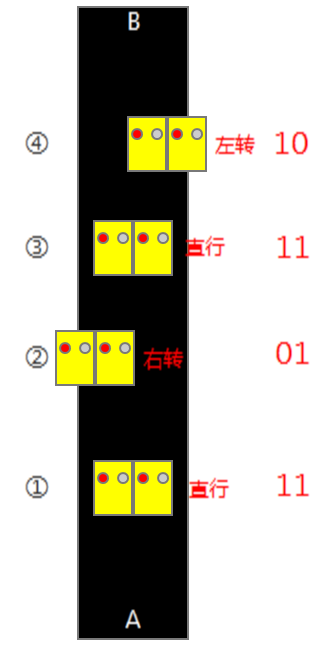
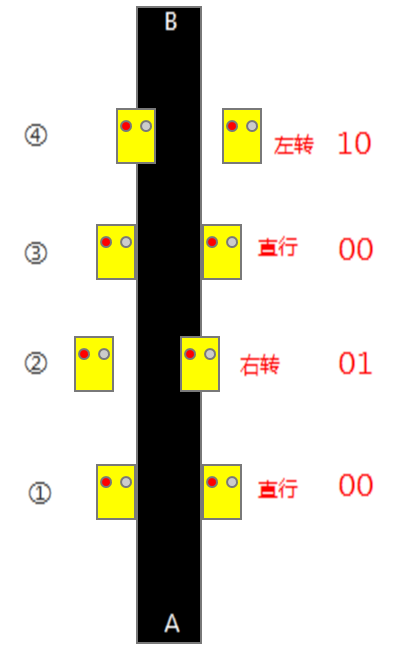
图1 两个传感器都在轨迹上 图2 两个传感器都在轨迹外
图1适用于轨迹线宽度大于两个传感器并列宽度的情况,状态①为两个传感器都在轨迹上,此时返回值为11,机器人直行;状态②为左边传感器在轨迹外,此时返回值为01,机器人
双轨迹传感器巡线
一、主要思路:
双轨迹传感器巡线即使用两个传感器走轨迹线。双轨迹巡线有两种巡线方式:两个传感器都在轨迹上、两个传感器都在轨迹外,如图1-2:
图1 两个传感器都在轨迹上 图2 两个传感器都在轨迹外
图1适用于轨迹线宽度大于两个传感器并列宽度的情况,状态①为两个传感器都在轨迹上,此时返回值为11,机器人直行;状态②为左边传感器在轨迹外,此时返回值为01,机器人
 2883
2883

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























