






Carsim是一种专门用于车辆动力学仿真的软件,它可以模拟车辆在不同路面上的行驶状态,并提供悬挂、底盘、刹车、转向等多种参数来控制车辆的行驶。Carsim也支持与其他软件的联合仿真,如MATLAB等。本文将Carsim和Simulink联合仿真,即通过将Carsim模型与Simulink模型连接起来,使得在Simulink中设计的控制器可以直接影响Carsim模型的运动状态,从而进行更加全面的系统仿真。
1 连接Carsim2019与Simulink
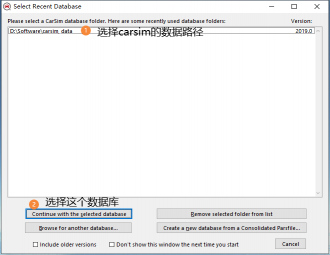
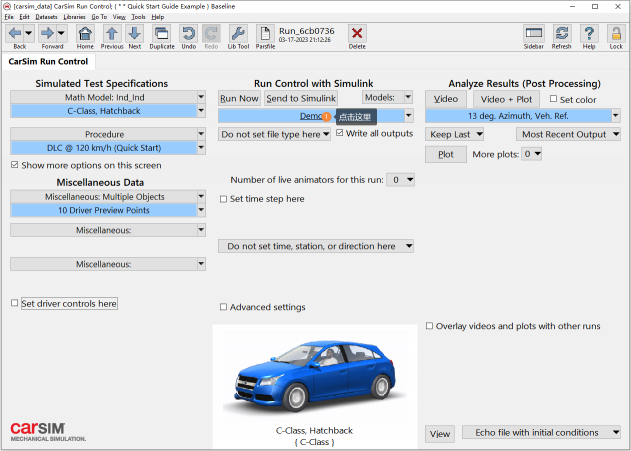
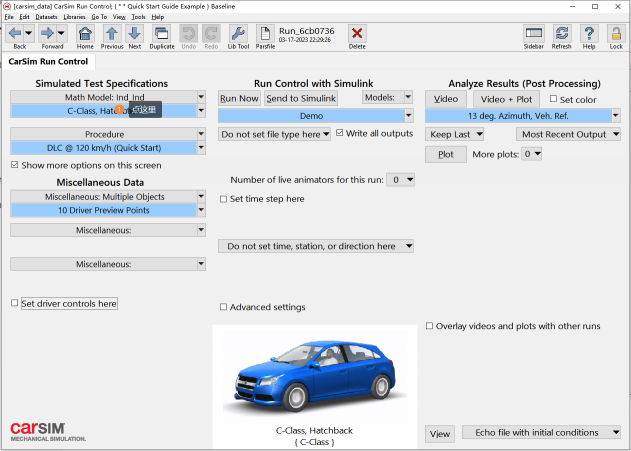
1.1 打开carsim2019软件,选择数据路径,这里选择安装软件时的路径
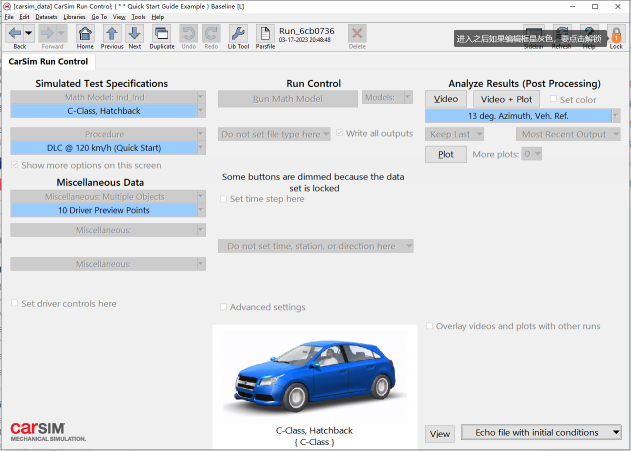
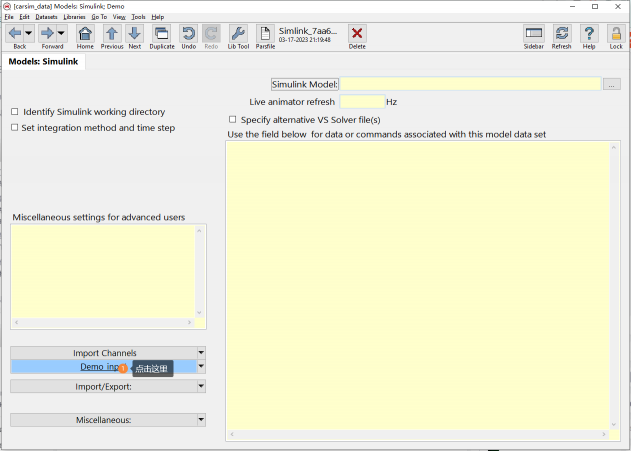
1.2进行环境的配置,进入后编辑框如果显示的页面是灰色的,点击右上角的lock进行解锁
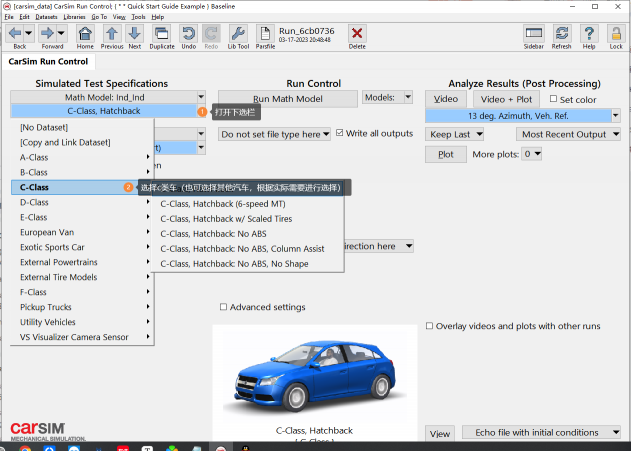
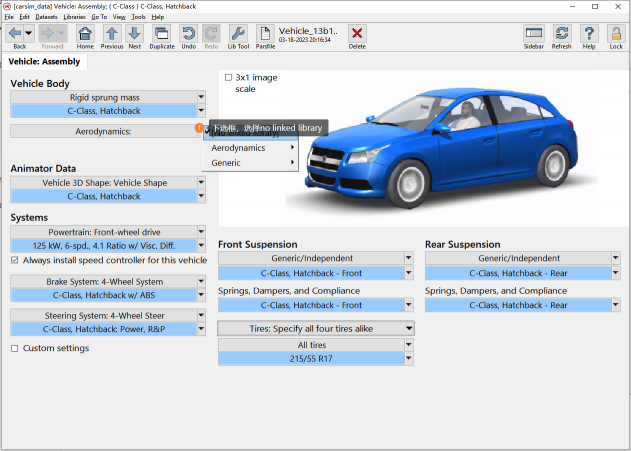
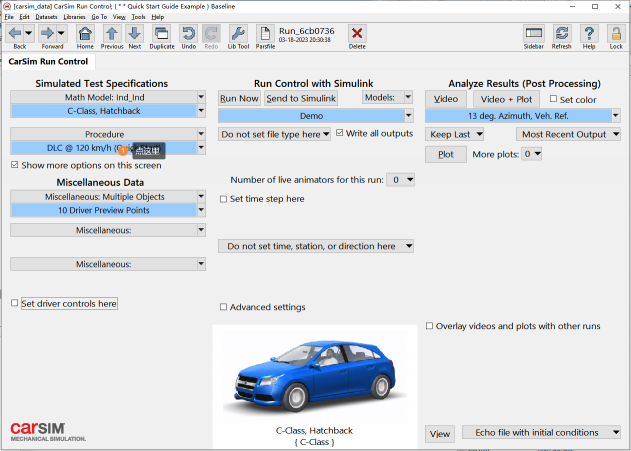
1.3选择仿真的车型,这里我们选择C类车
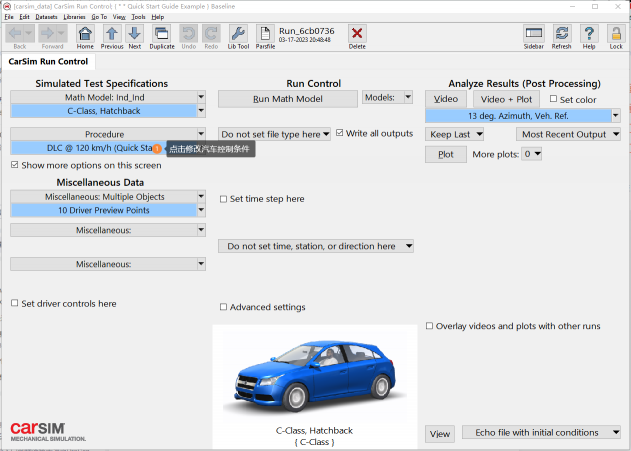
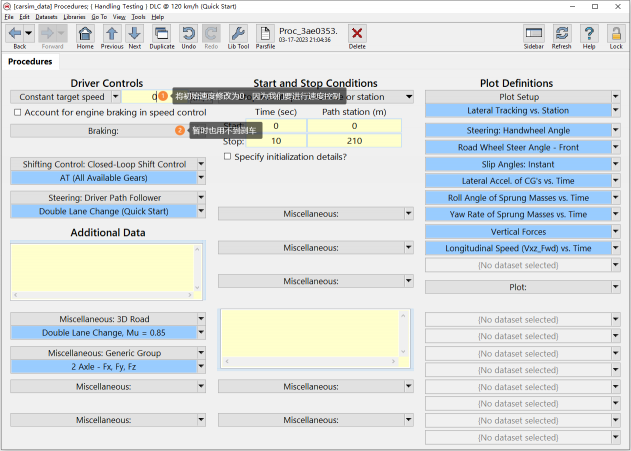
1.4修改汽车的控制条件
1.5将汽车的初始速度设置为0,刹车也取消
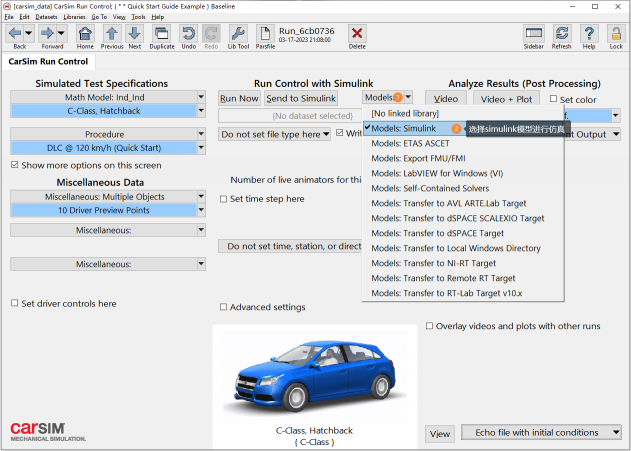
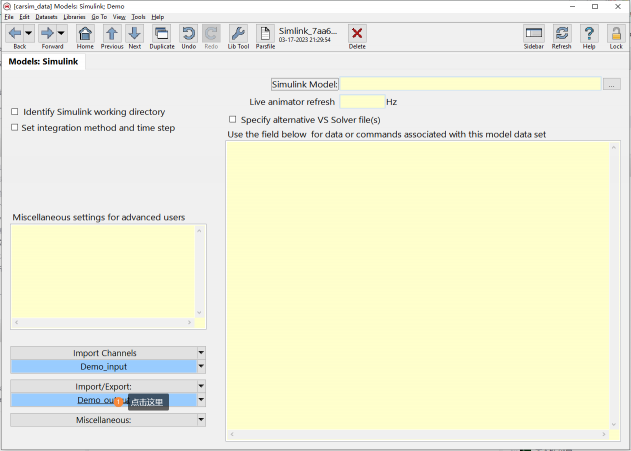
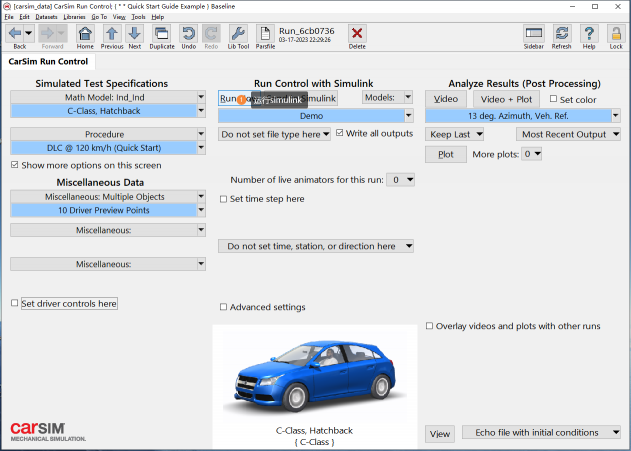
1.6选择simulink模型进行仿真
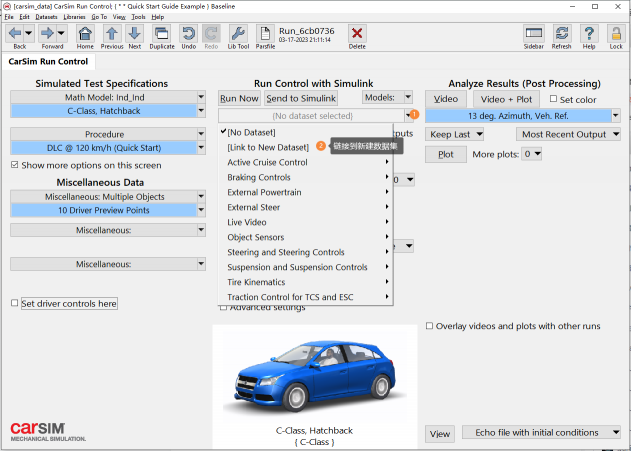
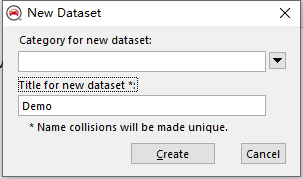
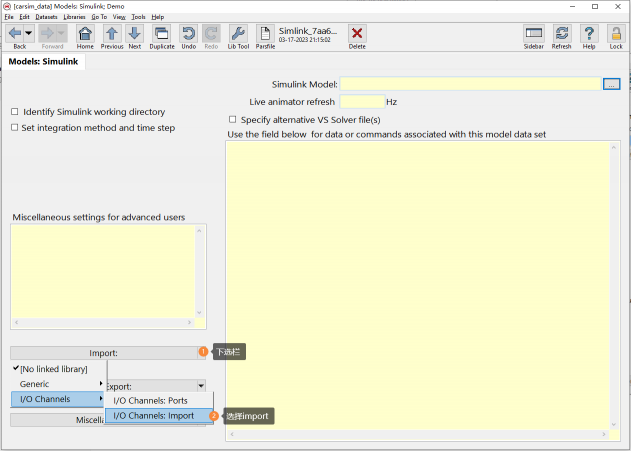
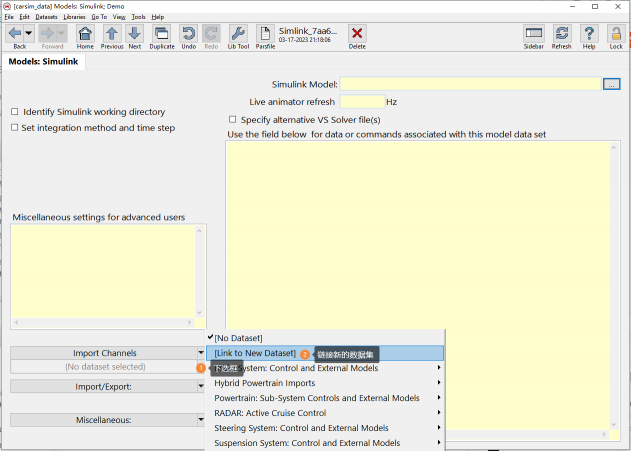
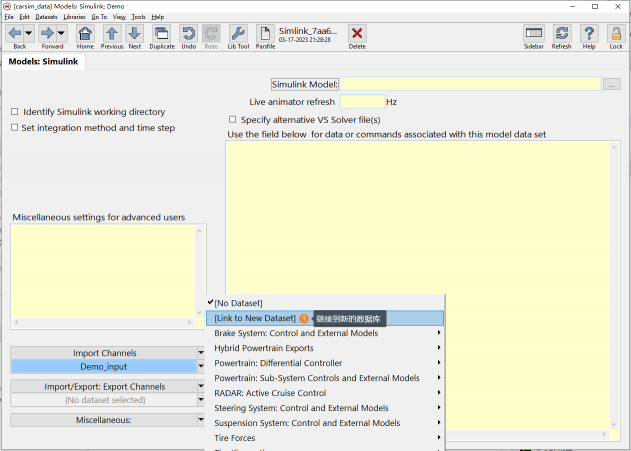
1.7建立新的数据
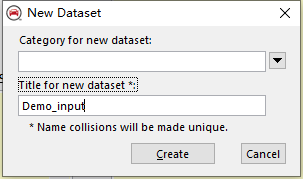
1.8命名都可以,我们这里为Demo
1.9进行数据库的参数配置
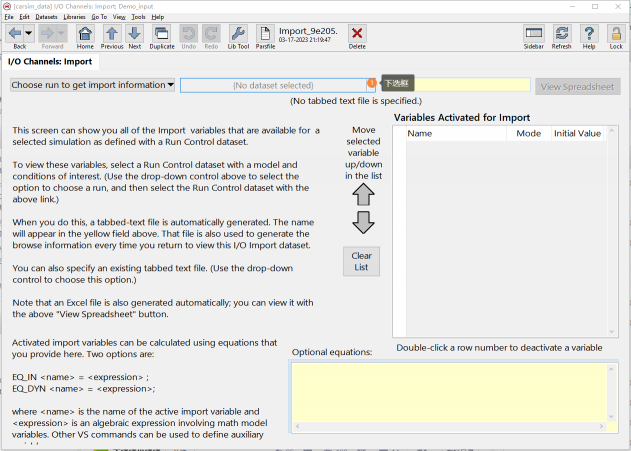
1.10配置输入数据
1.11新建输入数据库
1.12这里命名为Demo_input
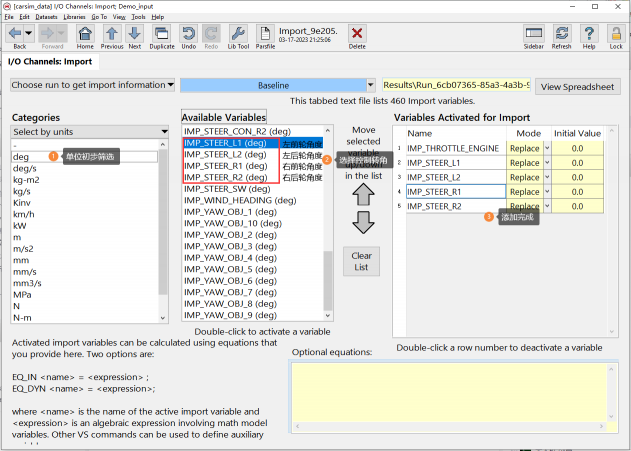
1.13进入输入参数配置页面
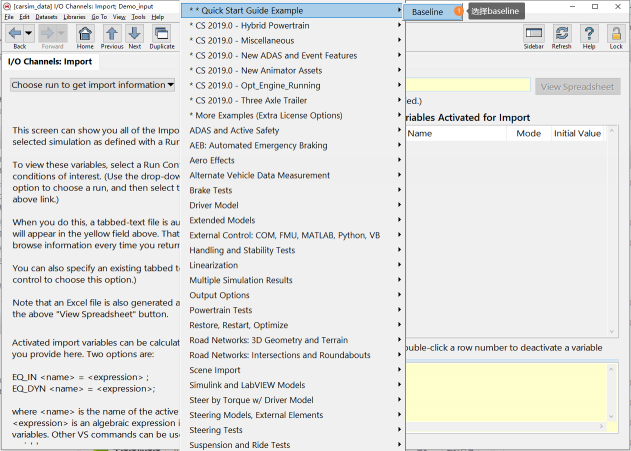
1.14选择现有的输入数据库
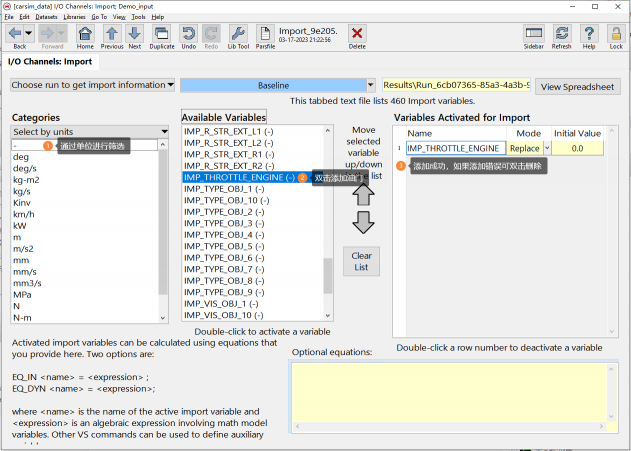
1.15选择快速开始导航——Baseline
1.16添加油门输入
1.17添加轮胎转角输入
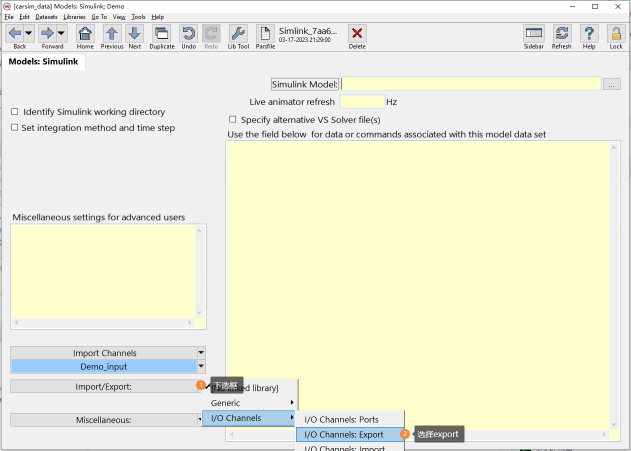
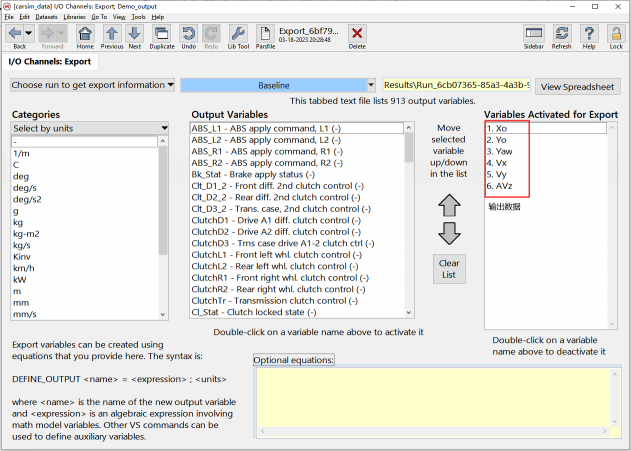
1.18配置输出数据库
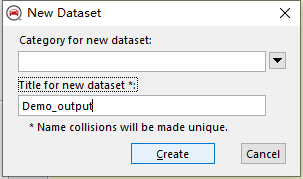
1.19新建输出数据库
1.20这里命名为Demo_output
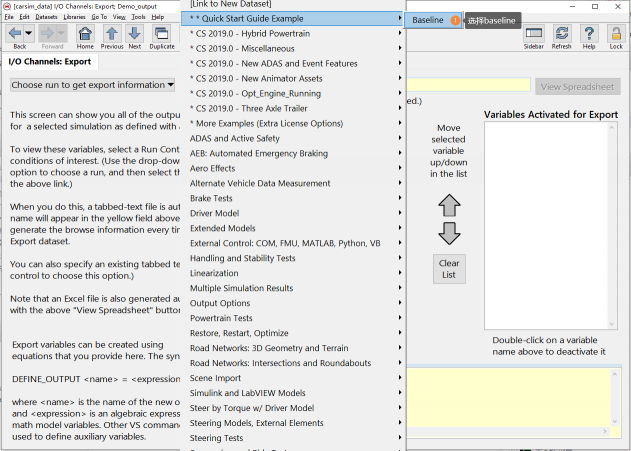
1.21 配置输出
1.22选择快速开始导航——Baseline
1.23选择输出数据,x方向距离,y方向距离,偏航角
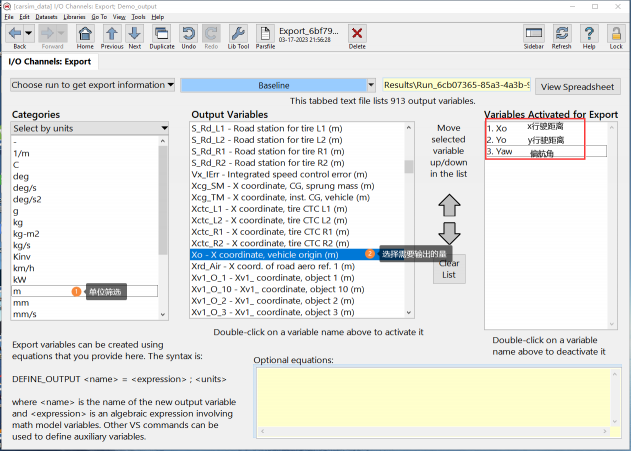
至此carsim参数配置完成
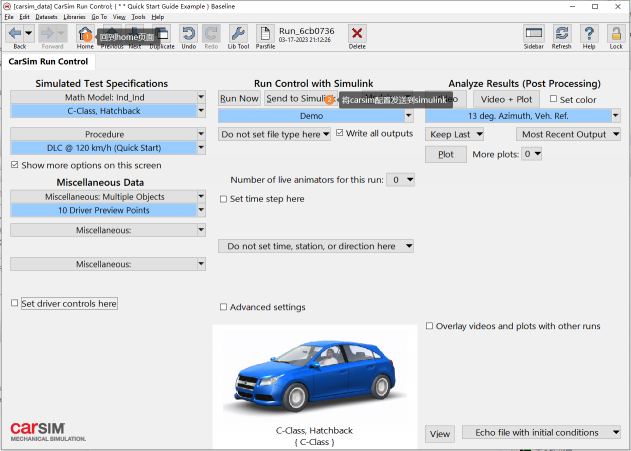
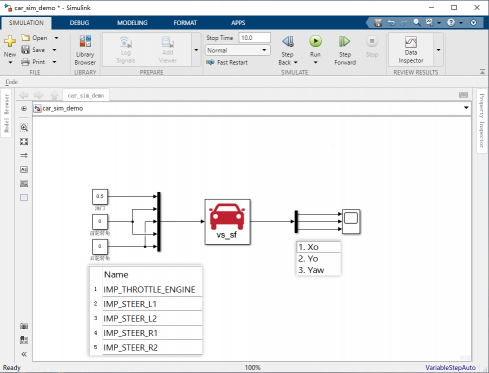
1.24新建一个simulink文件

1.25通过carsim加载simlink模型

1.26将carsim配置完成的参数生成simulink组件发送到simulink
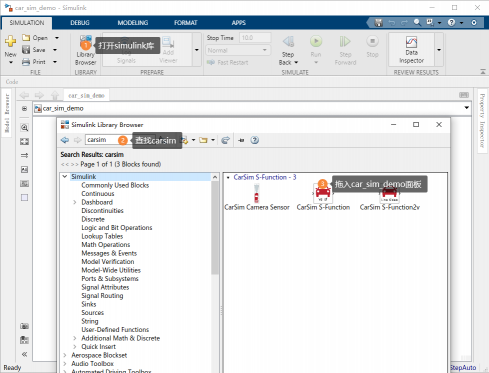
1.27进入simulink库查找carsim模块
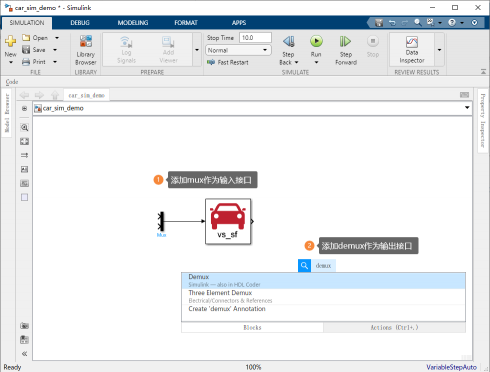
1.28为carsim S-Function模块添加输入输出
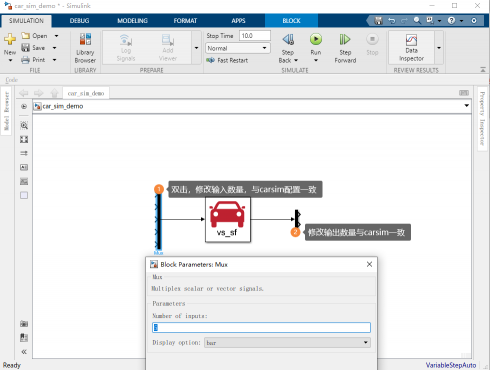
1.29修改输入输出的个数,与carsim配置参数一致
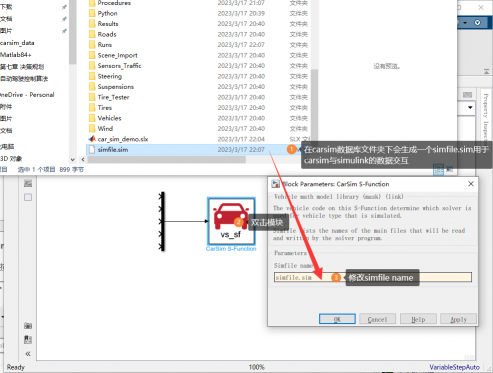
1.30 simfile.sim文件用于描述Simulink模型和Carsim模型之间的连接,在联合仿真中,Carsim模型和Simulink模型交替进行仿真计算,通过simfile.sim文件所描述的接口,将Simulink模型的输出与Carsim模型的输入相连接。这样就实现了两个模型之间的数据交互和联合仿真。
1.31 添加输出输出
1.32 点击run,会运行simulink,同时数据会通过simfile.sim与carsim进行交互
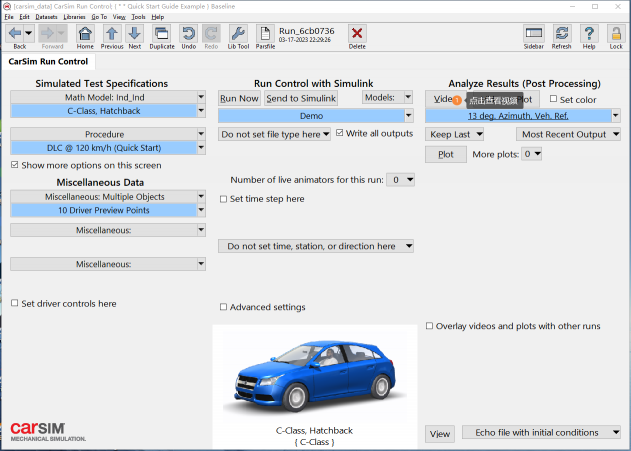
1.33 点击video,会生成运行效果视频
1.34 出现以下画面,按住鼠标右键可以改变视角
确保软件可用后,进行汽车控制仿真
2 汽车的建模
运动学模型
为了简化计算,采用自动车模型近似汽车模型
变量定义:
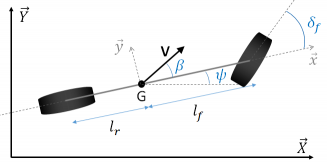
其中
运动学模型:
输入量:前轮转角��δf,加速度(油门/刹车)
状态:车辆位置(x,y),速度变化率(加速度) ,偏航角变化率(角速度)
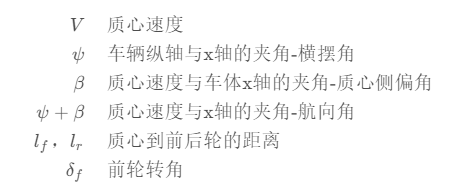
O-转动中心,两个轮子的垂直线相交
R-转动半径
根据正弦定理:
sin(��−�)ℓ�=sin(�2−��)�sin(�−��)ℓ�=sin(�2+��)�ℓfsin(δf−β)=Rsin(2π−δf)ℓrsin(β−δr)=Rsin(2π+δr)
展开有:
sin(��)cos(�)−sin(�)cos(��)ℓ�=cos(��)�cos(��)sin(�)−cos(�)sin(��)ℓ�=cos(��)�ℓfsin(δf)cos(β)−sin(β)cos(δf)=Rcos(δf)ℓrcos(δr)sin(β)−cos(β)sin(δr)=Rcos(δr)
$$
\begin{aligned}
& \tan \left(\delta_{\mathrm{f}}\right) \cos (\beta)-\sin (\beta)=\frac{l_f}{R} \\
& \sin (\beta)-\tan \left(\delta_{\mathrm{r}}\right) \cos (\beta)=\frac{l_r}{R}
\end{aligned}
$$
上式相加有:
(tan(��)−tan(��))cos(�)=��+���(tan(δf)−tan(δr))cos(β)=Rlf+lr
低速行驶下,车辆的方向变化速率小于车辆的角速度
�˙≈�=��=�⋅1�=�⋅(tan(��)−tan(��))cos(�)��+��=�cos(�)��+��(tan(��)−tan(��))ψ˙≈r=RV=V⋅R1=V⋅lf+lr(tan(δf)−tan(δr))cos(β)=lf+lrVcos(β)(tan(δf)−tan(δr))
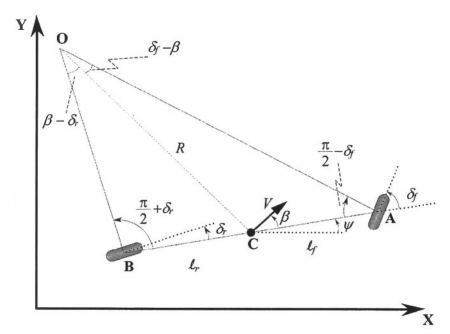
质心运动学模型
X轴方向:
�˙=�cos(�+�)X˙=Vcos(ψ+β)
Y轴方向:
�˙=�sin(�+�)Y˙=Vsin(ψ+β)
yaw轴方向:
�˙=�cos(�)��+��(tan��−tan��)ψ˙=lf+lrVcos(β)(tanδf−tanδr)
β角:
�=tan−1(��tan��+��tan����+��)β=tan−1(lf+lrlftanδr+lrtanδf)
动力学模型
将汽车模型简化为自行车动力学模型:假设:纵向速度恒定,左右轴集中为一个轮子(自行车模型),忽略悬架运动、道路倾斜和空气动力学影响,解耦纵向和横向运动
根据牛顿第二定律有:
��=(d2� d�2)inertial =�˙�(y方向)+���˙(向心加速度)���+��Γ=���=�(�˙�+���˙)y方向受力�����−�����=���¨扭矩平衡ay=( dt2d2y)inertial =v˙y(y方向)+vxψ˙(向心加速度)Fyf+FyΓ=may=m(v˙y+vxψ˙)y方向受力lfFyf−lrFyr=Izψ¨扭矩平衡
轮胎的受力分析
轮胎的侧向力���Fyf,���Fyr,这里采用右手坐标系,所以���Fyf,���Fyr都是负数:
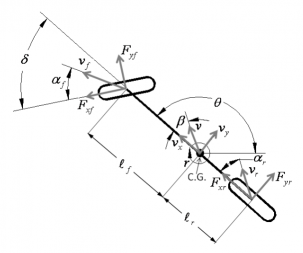
侧向力对动力学的影响:
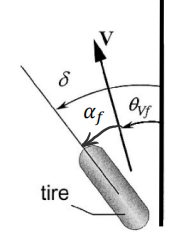
前轮转角:�δ,前轮速度转角���θvf,前轮侧偏角角��αf
打开carsim侧偏角与侧向力的关系曲线:
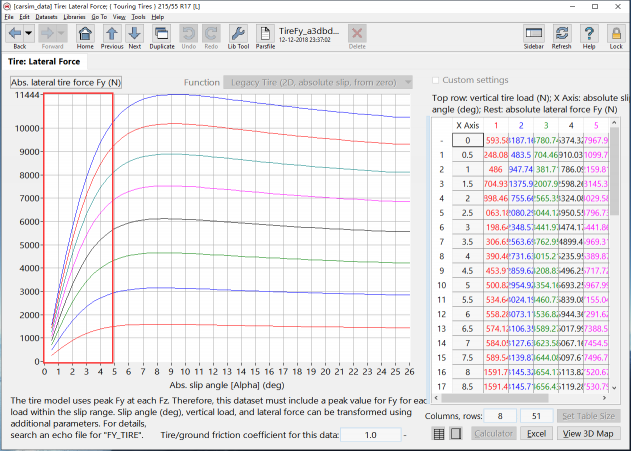
可以看到当侧偏角不超过5度时,可认为侧偏角与侧向力呈线性关系,线性斜率为侧偏刚度
得到:
���=2����=2��(�−���)���=2����=2��(−���)Fyf=2cfαf=2cf(δ−θvf)Fyr=2crαr=2cr(−θvr)
将速度进行两个方向的分解:
���=tan−1(������)=tan−1(��+�����)���=tan−1(������)=tan−1(��−�����)θvf=tan−1(vfxvfy)=tan−1(vxvy+lfr)θvr=tan−1(vrxvry)=tan−1(vxvy−lrr)
根据动力学模型的受力情况:
{���′+�′�Γ=���=�(�˙�+���˙)�����′−�����′=���¨⇓(���cos(�)−���sin(�))+���=�(�˙�+���)ℓ�(���cos(�)−���sin(�))−ℓ����=���¨=���˙{Fyf′+F′yΓ=may=m(v˙y+vxψ˙)lfFyf′−lrFyr′=Izψ¨⇓(Fyfcos(δ)−Fxfsin(δ))+Fyr=m(v˙y+vxr)ℓf(Fyfcos(δ)−Fxfsin(δ))−ℓrFyr=Izψ¨=Izr˙
侧偏角:
{��=�−tan−1(��+ℓ����)��=−tan−1(��−ℓ����)⎩⎨⎧αf=δ−tan−1(vxvy+ℓfr)αr=−tan−1(vxvy−ℓrr)
侧向力:
{���=c���=c�[�−tan−1(��+ℓ����)]���=����=−��tan−1(��−ℓ����)⎩⎨⎧Fyf=cfαf=cf[δ−tan−1(vxvy+ℓfr)]Fyr=crαr=−crtan−1(vxvy−ℓrr)
得到:
�˙�=��[�−tan−1(��+ℓ����)]cos(�)−��tan−1(��−ℓ����)−���sin(�)�−����˙=ℓ���[�−tan−1(��+ℓ����)]cos(�)+ℓ���tan−1(��−ℓ����)−�����sin(�)��v˙y=mcf[δ−tan−1(vxvy+ℓfr)]cos(δ)−crtan−1(vxvy−ℓrr)−Fxfsin(δ)−vxrr˙=Izℓfcf[δ−tan−1(vxvy+ℓfr)]cos(δ)+ℓrcrtan−1(vxvy−ℓrr)−lfFxfsin(δ)
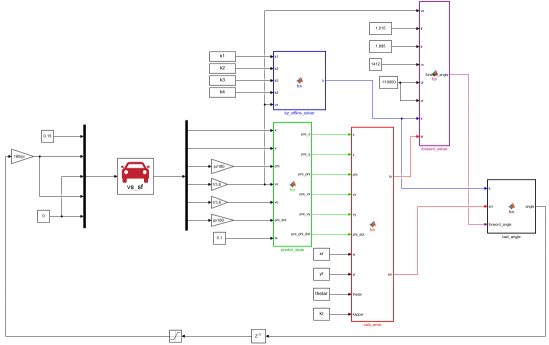
3 LQR汽车轨迹跟踪控制
3.1算法框图:
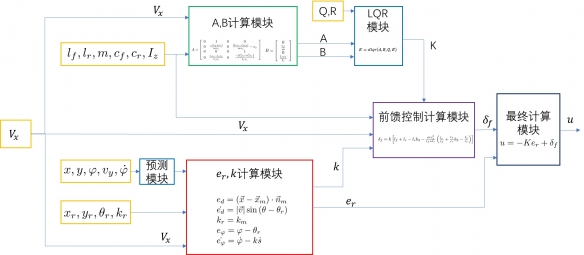
3.1.1 A、B矩阵计算模块-线性化动力学模型
当转角很小时:
cos(�)≈1sin(�)≈0tan−1(�)≈�cos(δ)≈1sin(δ)≈0tan−1(θ)≈θ
带入得到:
�˙�=−����−��ℓ�����+����+−����+��ℓ�����−����˙=−ℓ�����−ℓ�2�������+ℓ������+ℓ�����−ℓ�2�������v˙y=mvx−cfvy−cfℓfr+mcfδ+mvx−crvy+crℓrr−vxrr˙=Izvx−ℓfcfvy−ℓf2cfr+Izℓfcfδ+Izvxℓrcrvy−ℓr2crr
写成状态空间方程:
取状态:
�=[���]X=[vyr]
�=�u=δ
写成关于状态的方程:
�˙�=−(��+��)�����+[(����−����)���−��]�+�����˙=����−����������+−(ℓ�2��+ℓ�2��)�����+�������v˙y=mvx−(cf+cr)vy+[mvx(lrcr−lfcf)−vx]r+mcfδr˙=Izvxlrcr−lfcfvy+Izvx−(ℓf2cf+ℓr2cr)r+Izlfcfδ
得到:
[���˙]=[−(��+��)���(����−����)���−������−��������−(ℓ�2��+ℓ�2��)����][���]+[���������]�[vyr˙]=[mvx−(cf+cr)Izvxlrcr−lfcfmvx(lrcr−lfcf)−vxIzvx−(ℓf2cf+ℓr2cr)][vyr]+[mcfIzlfcf]δ
如果取状态,输入:
�=[��˙��˙],u=�X=yy˙ψψ˙,u=δ
有:
���[��˙��˙]=[01000−(��+��)���0(����−����)���−��00010����−��������0−(ℓ�2��+ℓ�2��)����][��˙��˙]+[0���0������]�dtdyy˙ψψ˙=00001mvx−(cf+cr)0Izvxlrcr−lfcf00000mvx(lrcr−lfcf)−vx1Izvx−(ℓf2cf+ℓr2cr)yy˙ψψ˙+0mcf0Izlfcfδ
�=[01000−(��+��)���0(����−����)���−��00010����−��������0−(ℓ�2��+ℓ�2��)����]A=00001mvx−(cf+cr)0Izvxlrcr−lfcf00000mvx(lrcr−lfcf)−vx1Izvx−(ℓf2cf+ℓr2cr)
�=[0���0������]B=0mcf0Izlfcf
3.1.2 LQR模块,计算反馈系数K
LQR(线性二次调节器)是一种控制器设计方法,它可以稳定线性系统并最小化控制信号的方均根误差。通过LQR,可以得到反馈系数K,用于控制系统的控制。
离散系统:
��+1=���+���,�0=�init xt+1=Axt+But,x0=xinit
离散LQR代价函数:
�(�)=∑�=0�−1(������+������)+�������J(U)=τ=0∑N−1(xτTQxτ+uτTRuτ)+xNTQfxN
K=dlqr(A,B,Q,R)
由动态规划求解可得(具体推导过程):
��=−(�+����+1�)−1����+1�Kt=−(R+BTPt+1B)−1BTPt+1A
其中
��−1=�+����+1�−����+1�(�+����+1�)−1����+1�Pt−1=Q+ATPt+1A−ATPt+1B(R+BTPt+1B)−1BTPt+1A
3.1.3 误差计算模块,k曲率计算模块
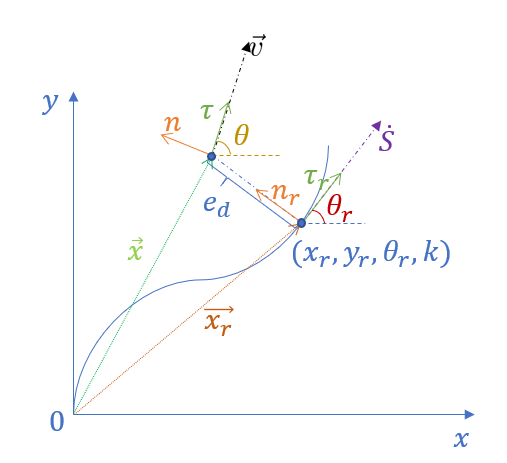
横向位置误差:
��=(�⃗−�⃗�)⋅�⃗�ed=(x−xr)⋅nr
横向速度误差:
��˙=∣�⃗∣sin(�−��)ed˙=∣v∣sin(θ−θr)
角度误差:
��=�−��eφ=φ−θr
角速度误差:
��˙=�˙−��˙eφ˙=φ˙−ks˙
其中
��˙=��˙θr˙=ks˙
k为曲率
�˙=∣�⃗∣cos(�−��)1−���s˙=1−ked∣v∣cos(θ−θr)
对于离散轨迹:
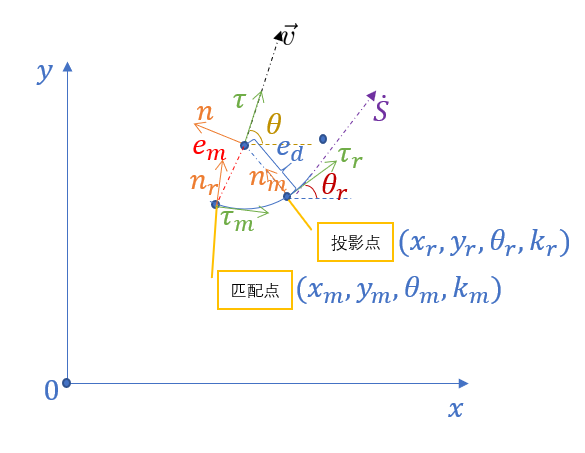
-
找到离散轨迹规划点与真实位置(x,y)最近的点
-
匹配点不是投影点,当规划点较密集时,匹配点可近似为投影点,假设匹配点与投影点的曲率相等,可近似两点在同一圆弧上
�⃗�=(cos��,sin��)�⃗�=(−sin��,cos��)�⃗−�⃗�=(�−��,�−��)�⃗−�⃗�=��τm=(cosθm,sinθm)nm=(−sinθm,cosθm)x−xm=(x−xm,y−ym)x−xm=em
- 横向误差可近似表示为:
��≈(�⃗−�⃗�)⋅�⃗�ed≈(x−xm)⋅nm
- e_s为匹配点与投影点之间的弧长,(正代表投影在匹配点的前面,负代表投影在匹配点的后面)
��≈(�⃗−�⃗�)⋅�⃗�es≈(x−xm)⋅τm
- 参考横摆角
��=��+��⋅��θr=θm+km⋅es
最终得到:
��=(�⃗−�⃗�)⋅�⃗���=(�⃗−�⃗�)⋅�⃗���=��+��⋅����=���˙=∣�⃗∣cos(�−��)1−�����=�−����˙=�˙−��˙��˙=∣�⃗∣sin(�−��)ed=(x−xm)⋅nmes=(x−xm)⋅τmθr=θm+km⋅eskr=kms˙=1−ked∣v∣cos(θ−θr)eφ=φ−θreφ˙=φ˙−ks˙ed˙=∣v∣sin(θ−θr)
输出
��,��˙,��,��˙,��ed,ed˙,eφ,eφ˙,kr
为了保证输出误差的可预见性,在误差计算模块后加入一个预测模块
3.1.4 预测
算法控制具有滞后性,加上预测模块,让算法有预见性,预测时间ts
�pre =�+���cos�=�+���cos(�+�)=�+����cos�−����sin��pre =�+���sin�=�+����cos�+����sin��pre =�+�˙���xpre =���ypre =���˙pre =�˙xpre =x+vtscosθ=x+vtscos(β+φ)=x+vxtscosφ−vytssinφypre =y+vtssinθ=y+vytscosφ+vxtssinφφpre =φ+φ˙tsvxpre =vxvypre =vyφ˙pre =φ˙
3.1.5 前馈计算
��=�[��+��−���3−���2��+��(����+�����3−����)]δf=k[lf+lr−lrk3−lf+lrmvx2(cflr+crlfk3−crlf)]
3.1.6 最终控制器形式
�=−���+��u=−Ker+δf
3.2 仿真实现
3.2.1环境配置:
关闭carsim风阻:
根据算法框图确定输入输出数据:
设定参考轨迹
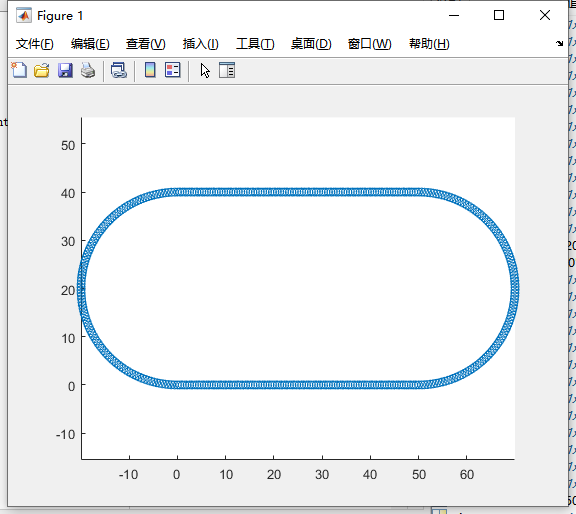
r = 20; w = 50; count = 100;
[xr, yr, thetar, kr] = motion_path(r, w, 2*r, count);
scatter(xr,yr);
axis equal;
function [xr, yr, thetar, kr] = motion_path(r, w, h, count)
% 长方形路径1
xc1 = linspace(0, w, count);
yc1 = ones(1, count)*0;
angle1 = zeros(1, count);
kappa1 = zeros(1, count);
% 半圆形路径1
theta2 = linspace( -pi/2,pi/2, count+2);
xc2 = r*cos(theta2(2:end-1)) + w;
yc2 = r*sin(theta2(2:end-1)) + r;
angle2 = theta2(2:end-1)+ pi/2;
kappa2 = ones(1, count)*(1/r);
% 长方形路径2
xc3 = linspace(w, 0, count);
yc3 = ones(1, count)*2*r;
angle3 = ones(1, count)*pi;
kappa3 = zeros(1, count);
% 半圆形路径2
theta4 = linspace(pi/2,3*pi/2, count+2);
xc4 = r*cos(theta4(2:end-1));
yc4 = r*sin(theta4(2:end-1)) + r;
angle4 = theta4(2:end-1) + pi/2;
kappa4 = ones(1, count)*(1/r);
% 拼接路径
xr = [xc1, xc2, xc3, xc4];
yr = [yc1, yc2, yc3, yc4];
thetar = [angle1, angle2, angle3, angle4];
kr = [kappa1, kappa2, kappa3, kappa4];
end
将参考轨迹添加到carsim


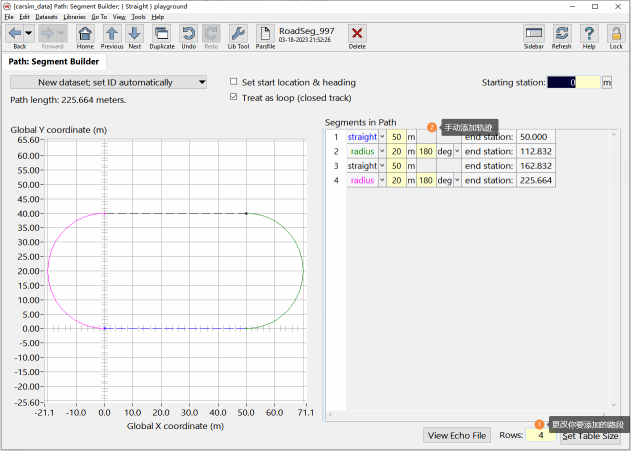

得到carsim中的参考轨迹
3.2.2搭建simulink模型:
预测模块:
function [pre_x,pre_y,pre_phi,pre_vx,pre_vy,pre_phi_dot] = fcn(x,y,phi,vx,vy,phi_dot,ts)
pre_x=x+vx*ts*cos(phi)-vy*ts*sin(phi);
pre_y=y+vy*ts*cos(phi)+vx*ts*sin(phi);
pre_phi=phi+phi_dot*ts;
pre_vx=vx;
pre_vy=vy;
pre_phi_dot=phi_dot;
end
误差计算模块:
function [kr,err] = fcn(x,y,phi,vx,vy,phi_dot,xr,yr,thetar,kappar)
n=length(xr);
d_min=(x-xr(1))^2+(y-yr(1))^2;
min=1;
for i=1:n
d=(x-xr(i))^2+(y-yr(i))^2;
if d<d_min
d_min=d;
min=i;
end
end
dmin=min;
tor=[cos(thetar(dmin));sin(thetar(dmin))];
nor=[-sin(thetar(dmin));cos(thetar(dmin))];
d_err=[x-xr(dmin);y-yr(dmin)];
ed=nor'*d_err;
es=tor'*d_err;
projection_point_thetar=thetar(dmin)+kappar(dmin)*es;
ed_dot=vy*cos(phi-projection_point_thetar)+vx*sin(phi-projection_point_thetar);
ephi=sin(phi-projection_point_thetar);
s_dot=vx*cos(phi-projection_point_thetar)-vy*sin(phi-projection_point_thetar);
s_dot=s_dot/(1-kappar(dmin)*ed);
ephi_dot=phi_dot-kappar(dmin)*s_dot;
kr=kappar(dmin);
err=[ed;ed_dot;ephi;ephi_dot];
end
LQR计算模块:
离线进行LQR求解,生成K表,加快运行时的速度,需要提前运行,将k值保存在工作空间
cf=-110000;
cr=cf;
m=1412;
Iz=1536.7;
a=1.015;
b=2.910-1.015;
k=zeros(5000,4);
for i=1:5000
vx=0.01*i;
A=[0,1,0,0;
0,(cf+cr)/(m*vx),-(cf+cr)/m,(a*cf-b*cr)/(m*vx);
0,0,0,1;
0,(a*cf-b*cr)/(Iz*vx),-(a*cf-b*cr)/Iz,(a*a*cf+b*b*cr)/(Iz*vx)];
B=[0;
-cf/m;
0;
-a*cf/Iz];
Q=1*eye(4);
R=10;
k(i,:)=lqr(A,B,Q,R);
end
k1=k(:,1)';
k2=k(:,2)';
k3=k(:,3)';
k4=k(:,4)';
调用k表
function k = fcn(k1,k2,k3,k4,vx)
if abs(vx)<0.01
k=[0,0,0,0];
else
index=round(vx/0.01);
k=[k1(index),k2(index),k3(index),k4(index)];
end
end
前馈计算模块
function forword_angle = fcn(vx,lf,lr,m,cf,cr,k,kr)
forword_angle=kr*(lf+lr-lr*k(3)-(m*vx*vx/(lf+lr))*((lr/cf)+(lf/cr)*k(3)-(lf/cr)));
end
最终角度输出计算:
function angle = fcn(k,err,forword_angle)
angle=-k*err+forword_angle;
end
3.2.3最终实现效果
参考
本文主要参考B站UP【忠厚老实的老王】讲解视频















 1060
1060

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









