







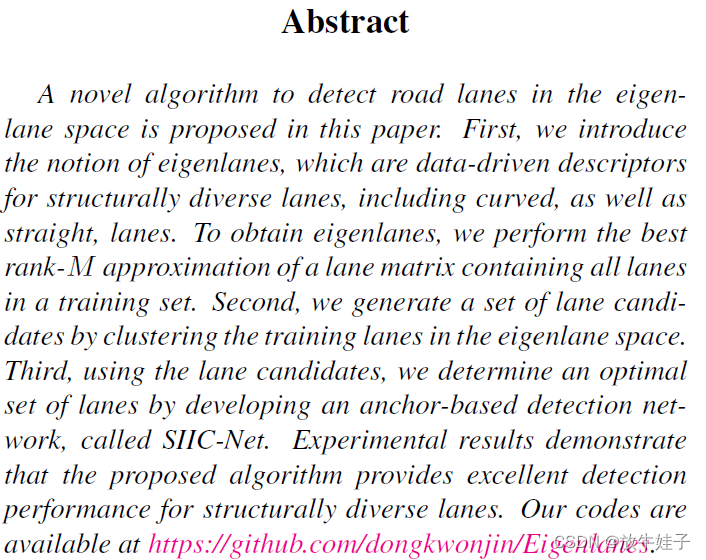
Eigenlanes: Data-Driven Lane Descriptors for Structurally Diverse Lanes
主要思想:
1. 针对单条线,用50个x坐标表示一条车道线;
2.统计训练集中所有车道线,假定总条数为L;
3.利用主成分分析法,计算M(M取4或者3,就有不错的效果)条车道线作为基,训练集中的任意车道线都可由M条线加权近似得到;
4.对2中L条车道线,用聚类算法,得到k类,作为车道线的k个anchor;
5. 输入一张图片,用resnet50这类模型提取特征,对输出的不同尺度的特征融合;
6.加辅助分支,对车道线做语义分割,区分前景背景;
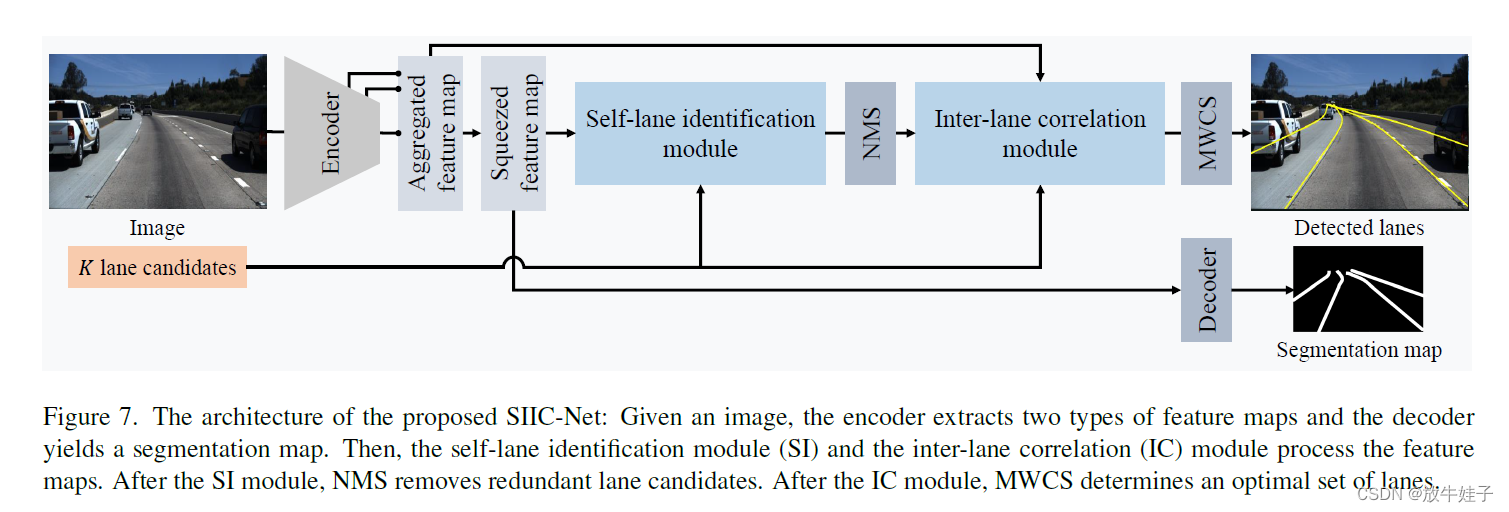
7. 用SI module预测每个anchor的概率P、车道线远端点H、偏执O,O对应公式8中的Δc;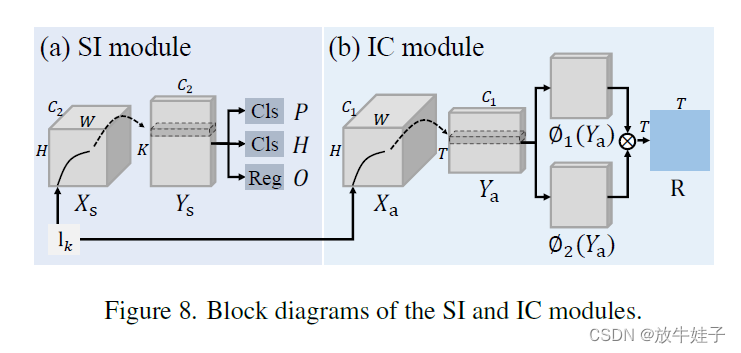

8. 利用NMS,选取top T条线,T为10;
9. 根据车道线结构约束,计算8中每条线与其他线的相关性,对T条线做进一步筛选;
10. 对每条做一些简单后处理后输出最终结果。
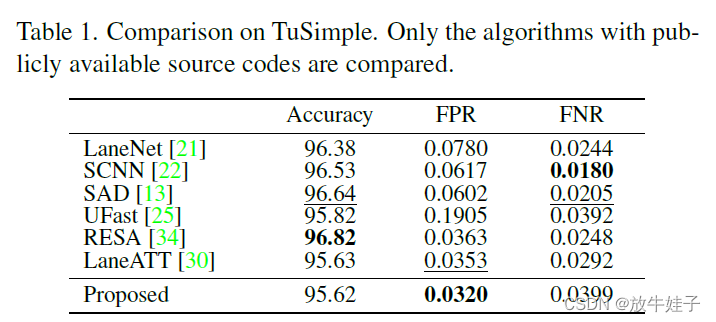
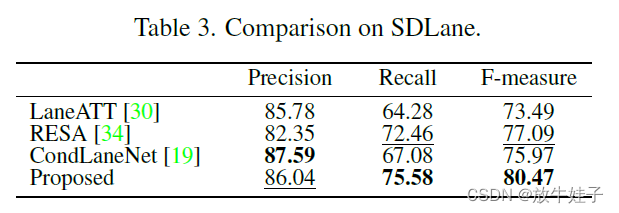
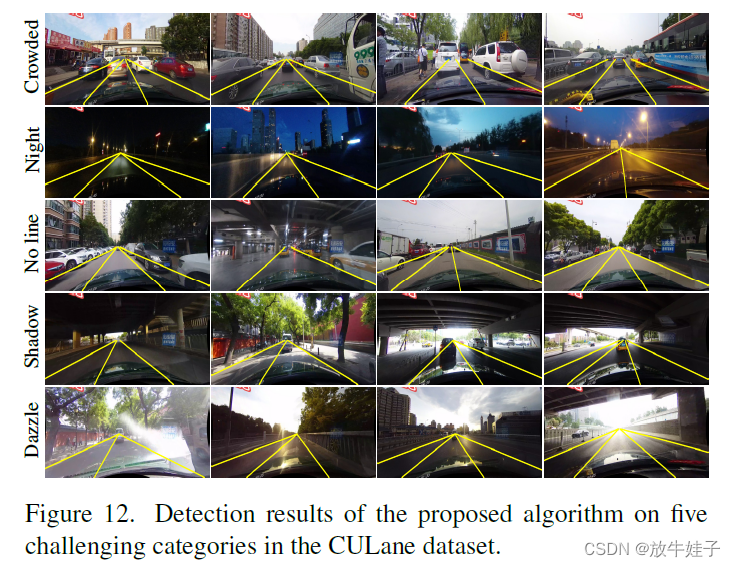
实验
CondLaneNet戳here















 1040
1040











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









